- @YGkDOYjbiPA
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
EP3C40F484C8N+cyusb3014 该板子之前批量过,现在没有板子了,只有完整的开发资料。包含FPGA源码,usb源码。资料里有原理图和pcb之前我们使用EP3C40F484C8N + cyusb3014的板子进行过批量项目开发,当时这个组合在我们的项目里可是发挥了巨大作用。然而现在板子都消耗完了,好在完整的开发资料还都在,今天就来和大家聊聊这段开发经历,顺便把资料分享出来,说不定能给

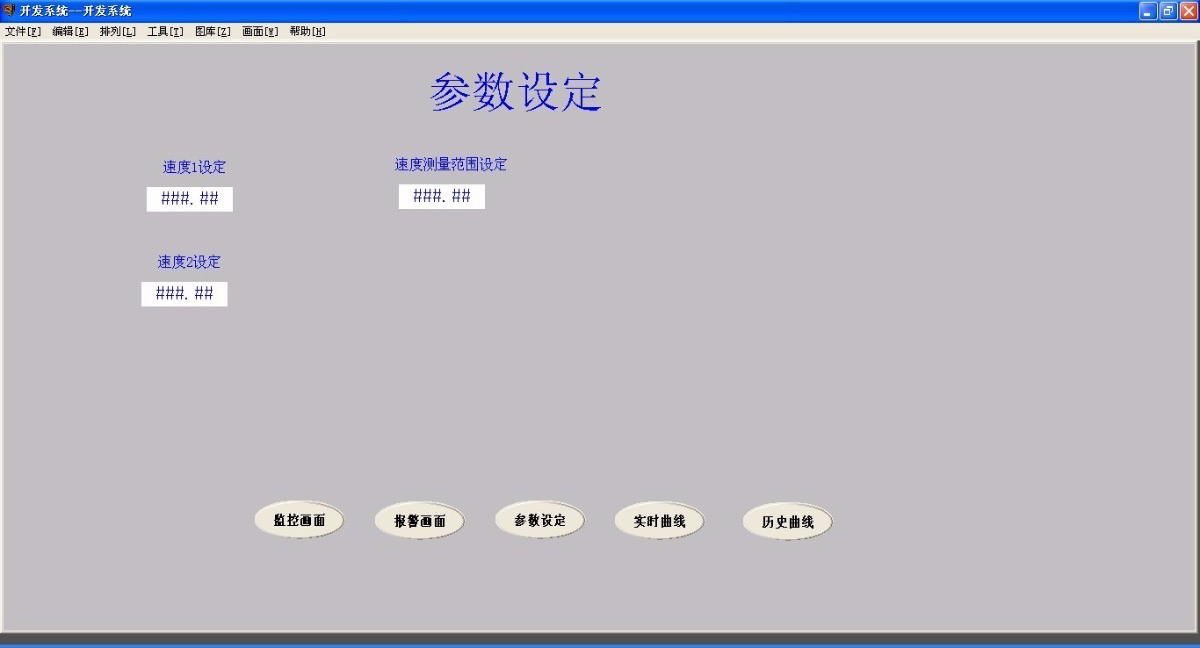
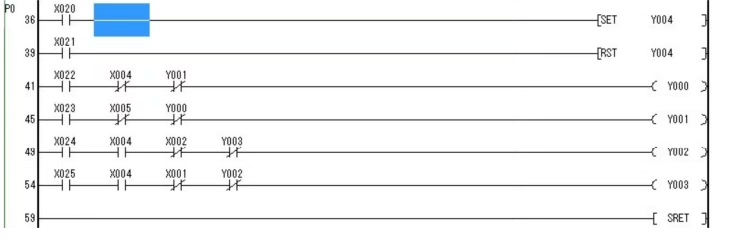
启动按钮挂在I0.0,急停开关怼在I0.1,焊枪到位检测用I0.2,三个工位传感器分别占I0.3-I0.5。说到坑点,第一次联调时组态王死活读不到PLC数据,后来发现是PC/PPI电缆的传输速率设成了187.5k,而组态王里默认是9.6k。要说心得嘛,搞自动化就像炒菜,PLC是灶台火候,组态王是摆盘造型,两者配合好了才能端出硬菜。这个系统最妙的地方在于把PLC的硬核控制和组态王的可视化操作完美结合
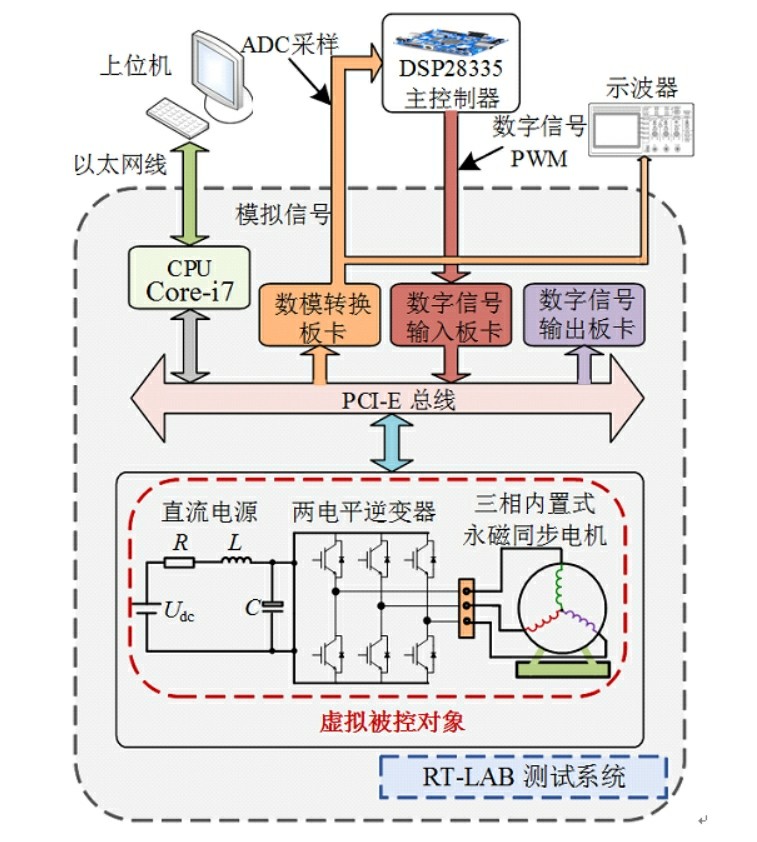
锁频环的内置式永磁同步电机无传感器控制仿真在电机控制领域,内置式永磁同步电机(IPMSM)因其高效、节能等诸多优点,被广泛应用于各种工业场合。然而,传统的电机控制往往依赖于传感器来获取电机的位置和速度信息,这不仅增加了系统成本,还可能降低系统的可靠性和鲁棒性。于是,无传感器控制技术应运而生,而基于锁频环(FLL)的无传感器控制方法在其中表现出独特的优势。今天,咱们就来唠唠锁频环的内置式永磁同步电机
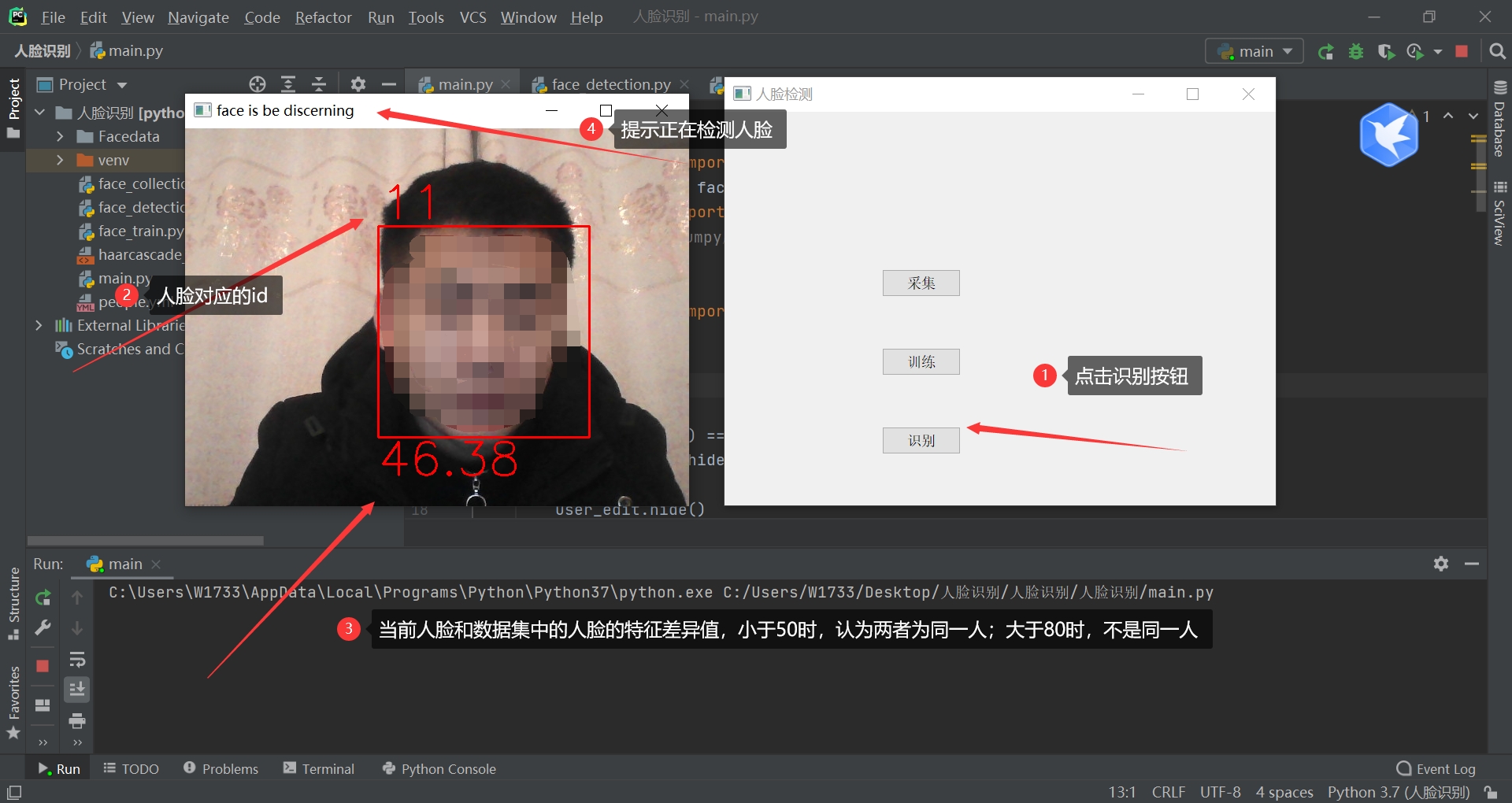
据库,通过人脸识别算法,把当前摄像头的人脸和数据库的人脸进行匹配,并把匹配度最高的人脸ID显示出来(只能输入数字ID),识别率不高。据库,通过人脸识别算法,把当前摄像头的人脸和数据库的人脸进行匹配,并把匹配度最高的人脸ID显示出来(只能输入数字ID),识别率不高。库文件:numpy、opencv-contrib-python、 opencv-python、pillow、PyQt5。库文件:nump
26#西门子S7-200三菱PLC和MCGS搬运机械手控制系统在自动化控制领域,搬运机械手控制系统结合不同品牌的PLC(可编程逻辑控制器)与MCGS(昆仑通态)组态软件,能实现高效、精准的物料搬运。今天就来聊聊26# 西门子S7 - 200、三菱PLC在这方面与MCGS的应用。
Stateflow里实现了多状态机协同:当车辆距离目标位置还剩1.2米时,状态机会从"Approaching"跳转到"PreciseAdjust",此时车速限制从5km/h降到2km/h。这套系统最实用的地方在于所有模块都是即插即用的——把Carsim的车辆模型换成自家实车参数,Simulink里的MPC控制器可以直接部署到域控制器。这可不是简单的倒车入库,而是带全局路径规划和MPC控制的智能泊车

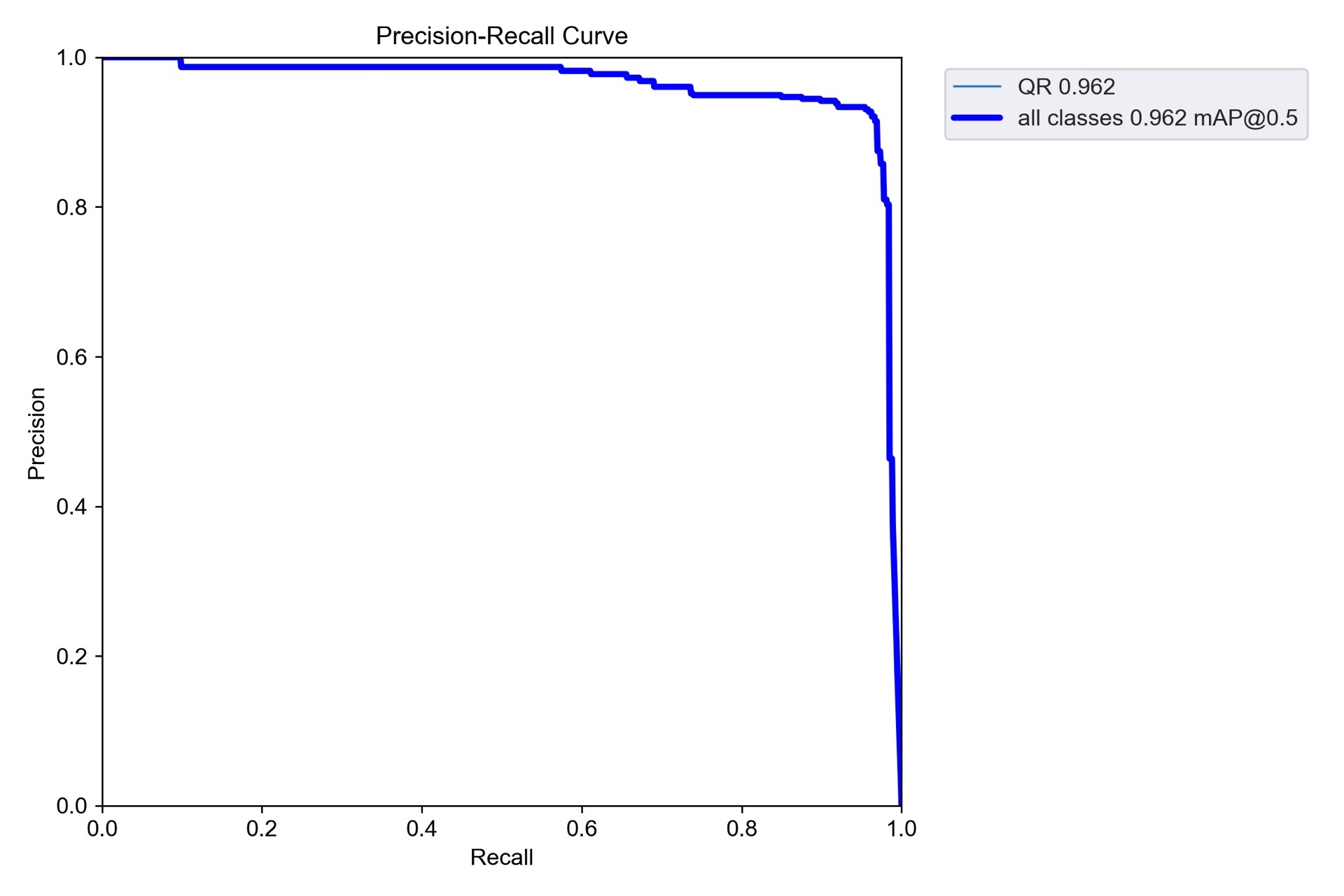
这里有个细节,YOLOv5的预训练模型是不带二维码检测的,得自己搞数据集训练。实测中发现传统方法在复杂场景下容易翻车,比如QR码被遮挡、光照不均或者存在大量干扰元素的时候,这时候上深度学习就香多了。基于YOLOv5的qr码二维码识别,采用YOLOv 5定位出qr码区域,在调用zbar,zxing或者opencv对qr码进行识别。基于YOLOv5的qr码二维码识别,采用YOLOv 5定位出qr码区域
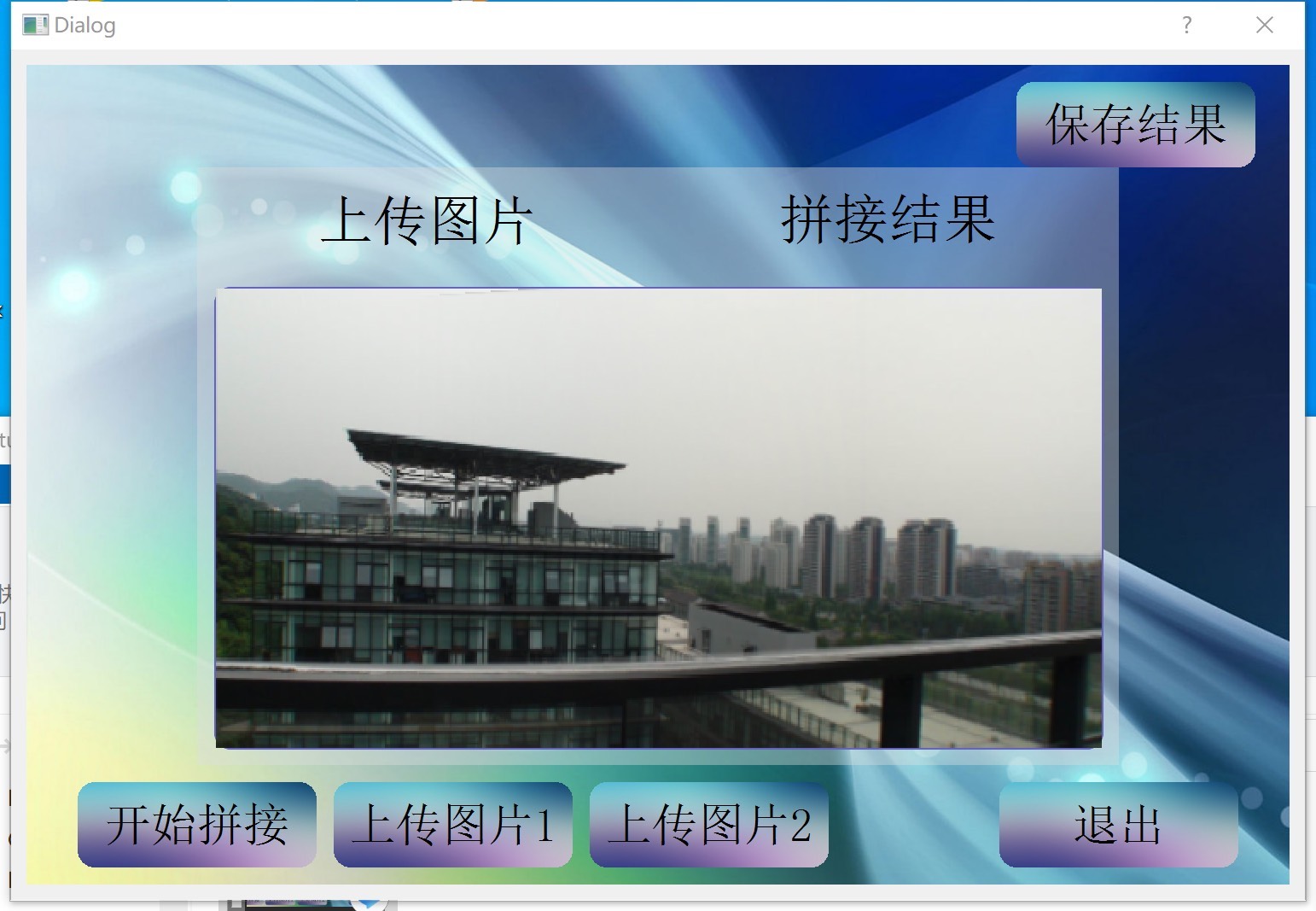
基于qt的opencv surf的特征点匹配图像拼接技术 python和c++都可以 还可以添加数据库mysql和sqlite 可支持多图拼接 可切换sift算法(假装这里有张炫酷的拼接效果对比图)基于qt的opencv surf的特征点匹配图像拼接技术 python和c++都可以 还可以添加数据库mysql和sqlite 可支持多图拼接 可切换sift算法凌晨两点的屏幕蓝光里,我盯着桌面上七零八
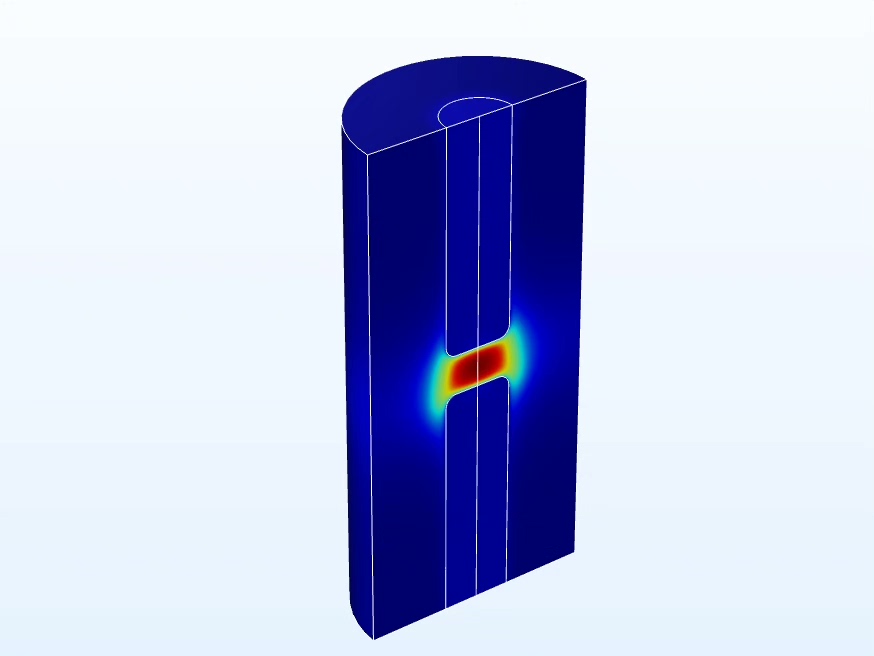
比如想降低电弧烧蚀,可以同时调整电极材料的热导率和分离速度,跑个几十组参数就能找到最佳平衡点。这可不是普通的静电场模拟,得让电极动起来,网格跟着变形,还要看着电弧在流体传热和电磁场里撒欢儿。要是发现电弧总是跑偏,八成是边界条件没设对称,或者移动速度参数没和电流匹配。整个系统像叠汉堡似的堆了四个物理场:电磁场负责产生洛伦兹力,层流模块处理气体流动,传热模块追踪温度分布,最后还得用动网格技术让电极能平
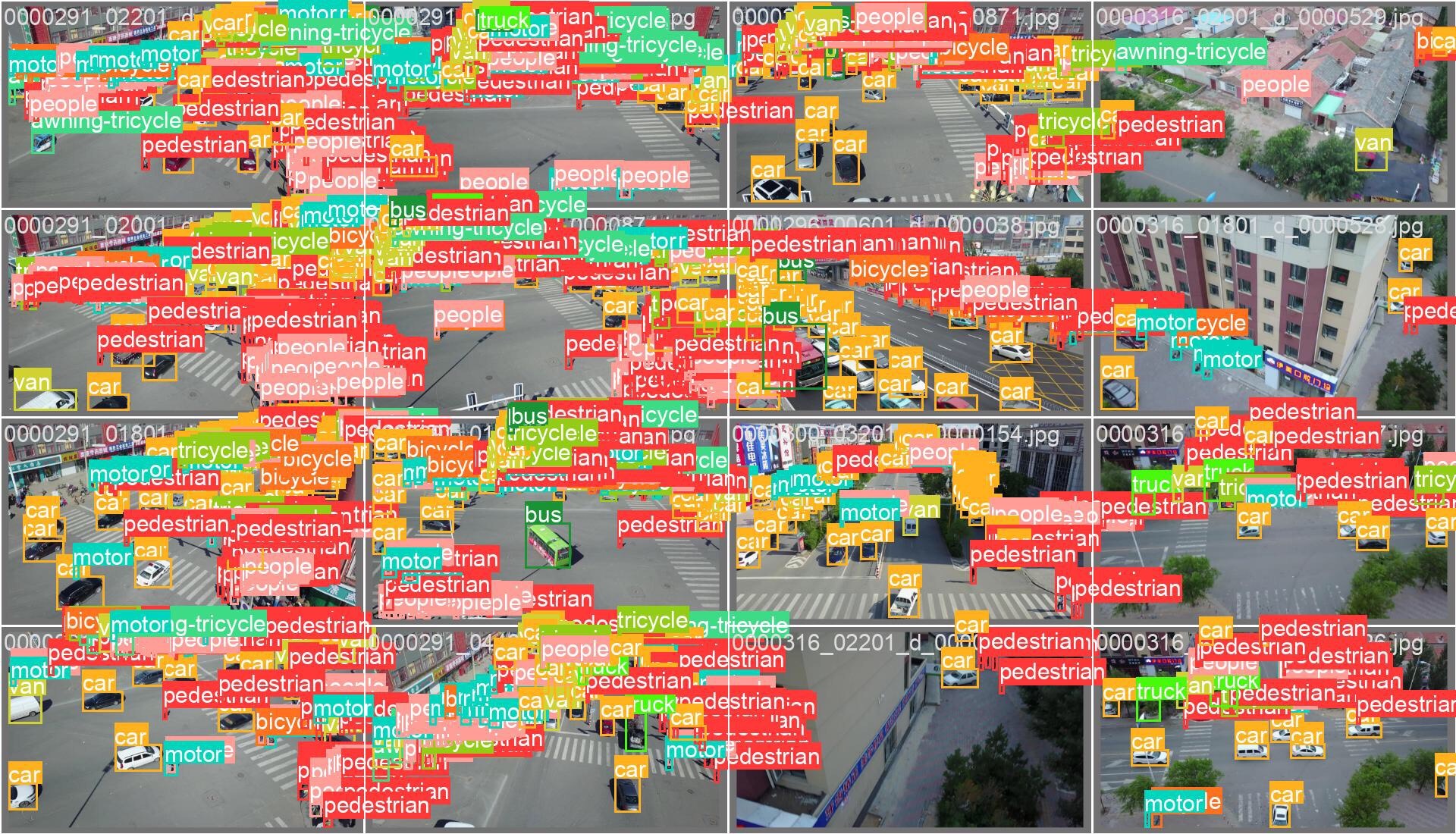
YOLOv8训练Visidron小目标检测数据集YOLOv8小目标检测精度提升,加入小目标的anchor参数,neck加入小尺寸层,变为4个detect,添加各自注意力机制,修改检测头等在目标检测领域,小目标检测一直是个颇具挑战的任务。最近我尝试使用YOLOv8对Visidron小目标检测数据集进行训练,并在过程中探索了一些提升精度的方法,今天就来和大家分享一下。