- @2504_94289831
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
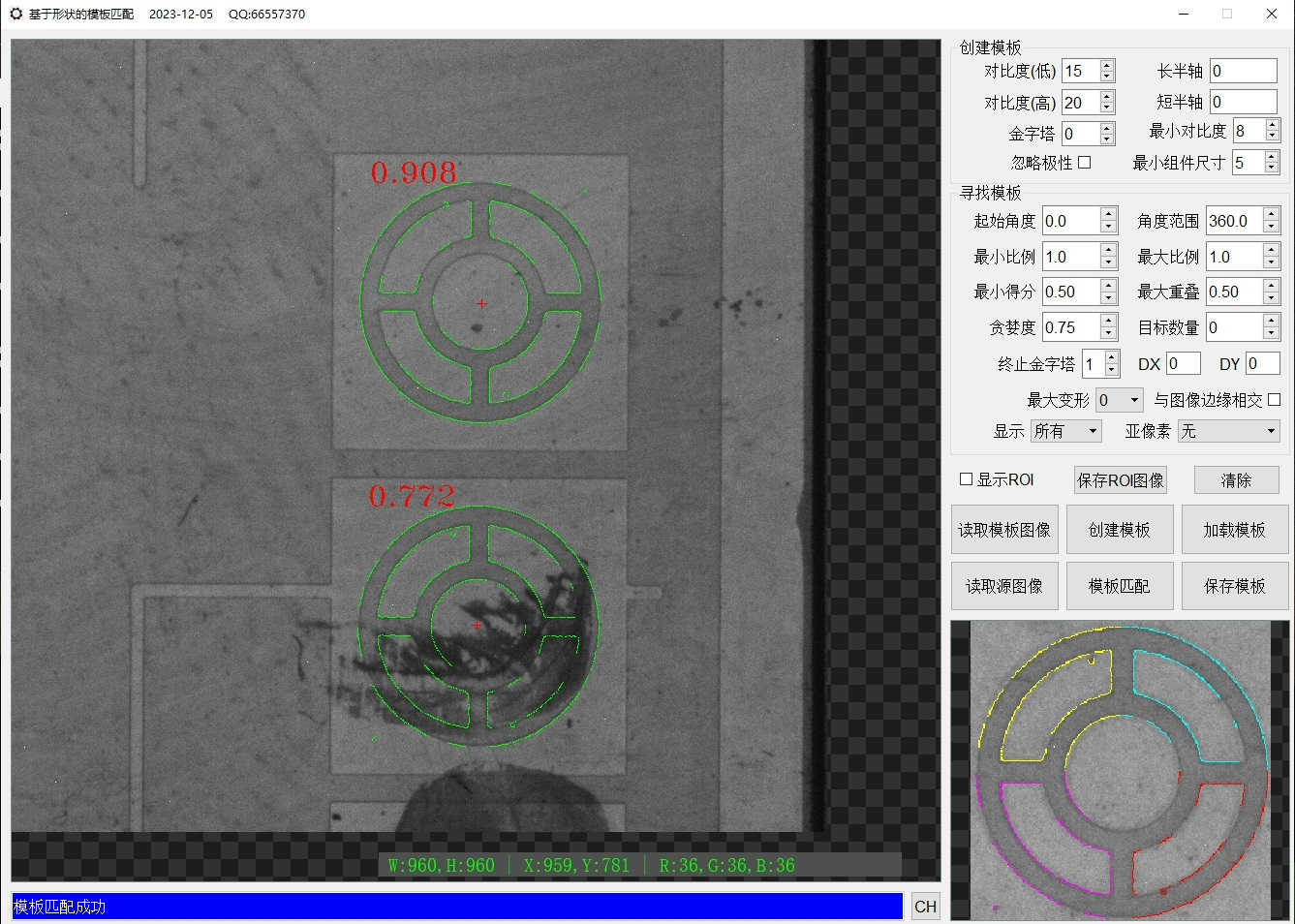
基于形状的模板匹配,十字识别,C++/C#在计算机视觉领域,基于形状的模板匹配是一项非常实用的技术,它可以帮助我们在复杂图像中精准定位特定形状的目标。今天咱们就来聊聊如何实现十字形状的识别,并且分别用C++和C#来实现。
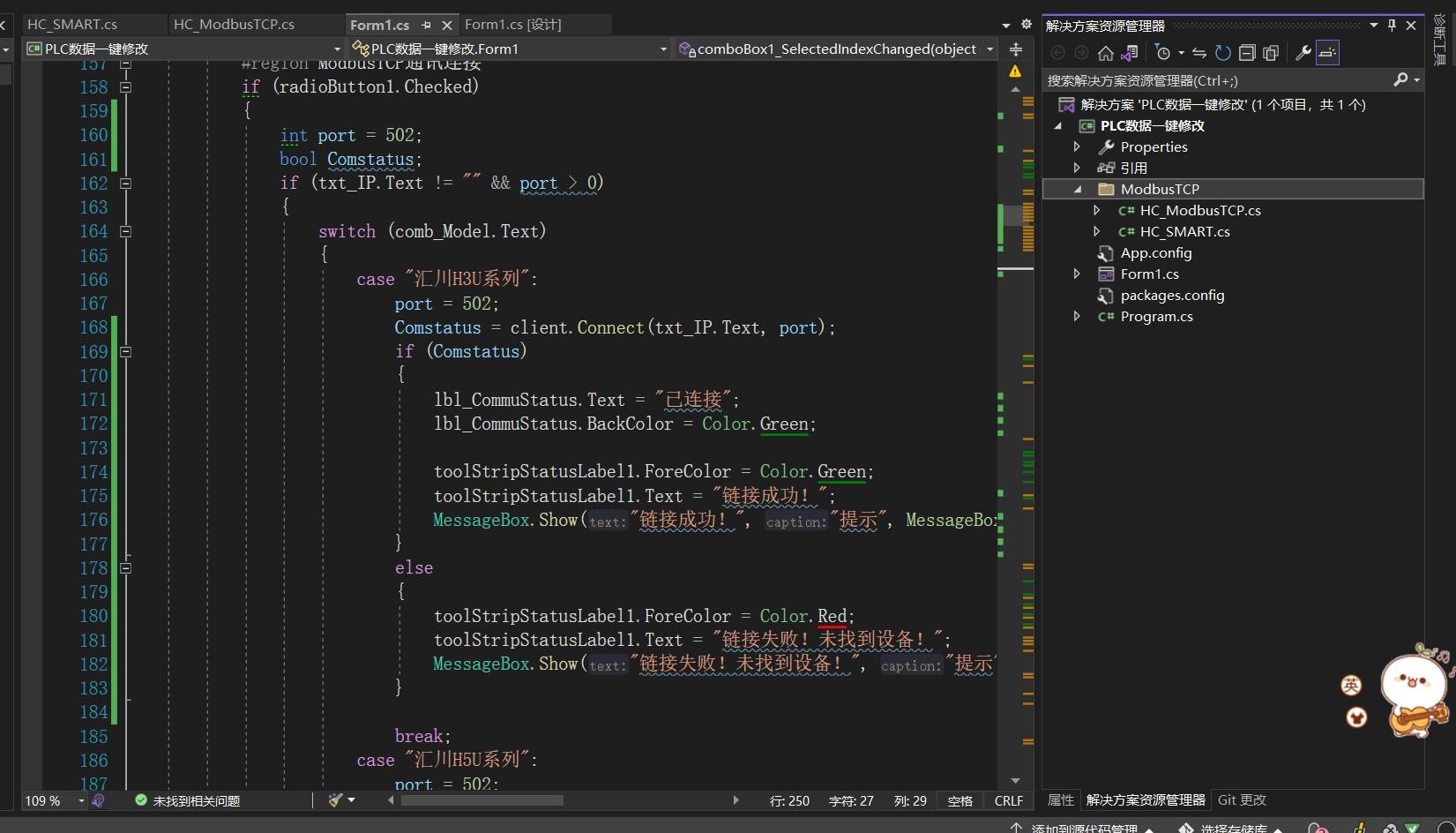
搞工控的都懂,有些延迟是物理特性决定的,代码再牛逼也干不过网卡。C#上位机读写PLC案例,TCP通信,通讯部分封装成类,没有加密,都是源码,注释齐全,纯源码,此版本支持汇川全系列PLC的ModebusTCP通讯的读写操作。最后说下C005型号的特殊处理:需要先发个特定握手报文,这个在基类里用虚方法实现,具体型号继承重写就行。这算法能把多个分散的写入请求合并成最少的Modbus报文,实测在修改50个
为了更直观理解,咱还有图片、PPT 和 PDF 资料。图片可以是建模过程中各个步骤的截图,比如草图绘制、部件生成、网格划分后的样子等等,能让大家清晰看到模型从无到有的过程。PPT 可以系统地整理这些图片,再加上文字说明,从原理到建模步骤详细阐述。PDF 则可以包含更深入的理论知识、参数解释以及相关的参考文献等等,给大家提供全面的学习资料。总之,通过上面的二维和三维 Python 代码,以及配套的图
基于深度学习YOLOv8+Pyqt5的电动车头盔佩戴检测系统将获得:完整源码+数据集+源码说明+配置跑通说明+配套报告lunwen可以额外付费远程操作跑通程序、定制其他课题等在许多非机动车交通事故中,未佩戴头盔是造成驾驶人受伤或死亡的主要原因,检测和惩处此类骑手对于降低道路交通事故严重性与保障人生命财产安全具有重要意义。

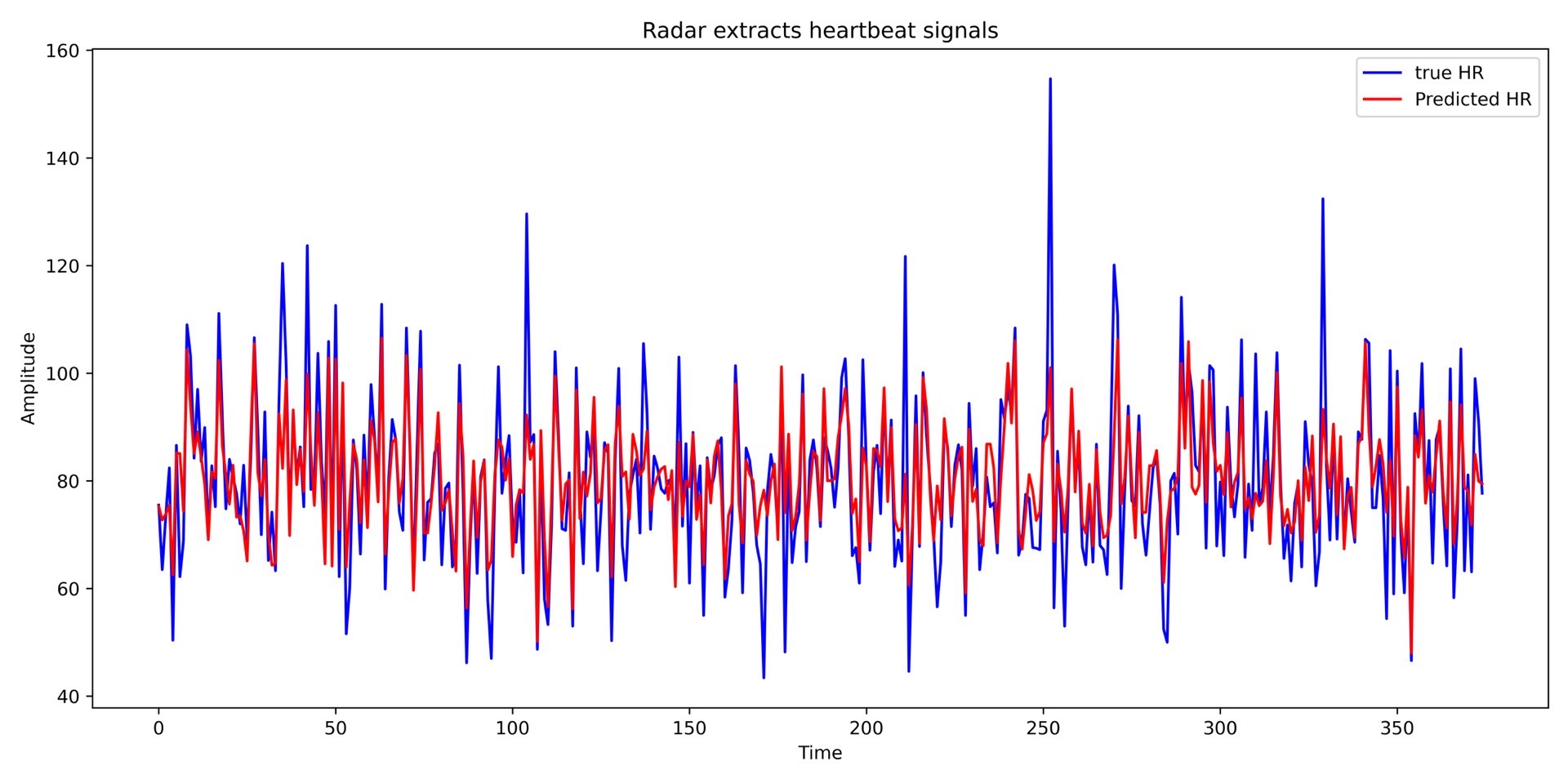
传统接触式传感器可能影响救治效率,而毫米波雷达的非接触特性正成为医疗监测的新可能。今天咱们用TensorFlow实战四种神经网络,从雷达信号中提取心跳这种"隐形指纹"。双向LSTM能捕捉信号的前后关联——比如心跳周期中的舒张期与收缩期特征。Transformer的自注意力机制能捕捉心跳节律的全局关系,适合处理不规则呼吸干扰下的信号。数据维度中的2000表示2秒时长(假设采样率1kHz),2个通道对
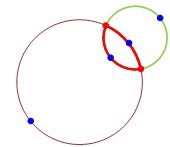
咱们的几何法则是拿着圆规在空间里画圈圈,找出所有支链都能满足的公共区域。但要注意当机构接近奇异位形时,可能出现数值不稳定,这时候可以加个微小扰动避免除零错误。这个函数能返回两个圆的交点坐标,配合循环使用就能得到所有边界特征点。选个z轴高度切片,这时候每个支链的约束就退化成环形区域,边界是俩同心圆。实际跑程序时会发现,工作空间边界像被狗啃过的披萨——由多个圆弧段拼接而成。但真正的边界是这些圆环的交集
今天分享的这套方案支持市面上八成主流伺服,从正点原子探索者到自制核心板都能跑,实测同步周期最低能压到1ms(别嫌慢,够用才是王道)。可配合汇川IS620N、埃斯顿ProNet、迈信EP3E、台达A2-E、伟创SD700、松下A5B/A6B和欧姆龙G5系列驱动器使用,或提供想适配的驱动器型号。可配合汇川IS620N、埃斯顿ProNet、迈信EP3E、台达A2-E、伟创SD700、松下A5B/A6B和
本项目集成了多种不同类型的外围芯片驱动,涵盖存储、模数转换、电机驱动等多个功能领域,旨在打造一个多功能的嵌入式系统基础框架。
本项目围绕大功率H桥电机驱动板电路设计展开,基于STM32F10x系列微控制器,采用IR2103S驱动芯片与N-MOS管构建H桥电路,实现对大功率直流电机的高效驱动与精准控制。代码体系涵盖底层核心驱动、硬件外设控制、通信交互等多个层面,共计75个文件,形成了一套完整的电机控制解决方案,可满足电机转速调节、转向控制、状态监测等核心需求,适用于工业自动化、智能设备等对电机控制精度和功率有较高要求的场景
麻雀搜索算法模拟了麻雀觅食和反捕食行为。在这个算法中,麻雀群体分为发现者(探索者)和加入者(追随者),发现者负责寻找食物并为整个群体提供觅食方向,加入者则跟随发现者获取食物。同时,麻雀还有反捕食行为,当危险来临,一部分麻雀会迅速做出反应以避免被捕食。BP神经网络是一种多层前馈神经网络,通过误差反向传播算法来调整网络的权值和阈值。它由输入层、隐藏层和输出层组成,信息从前向后传递,误差从后向前传播并不