- @QQ68823886
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
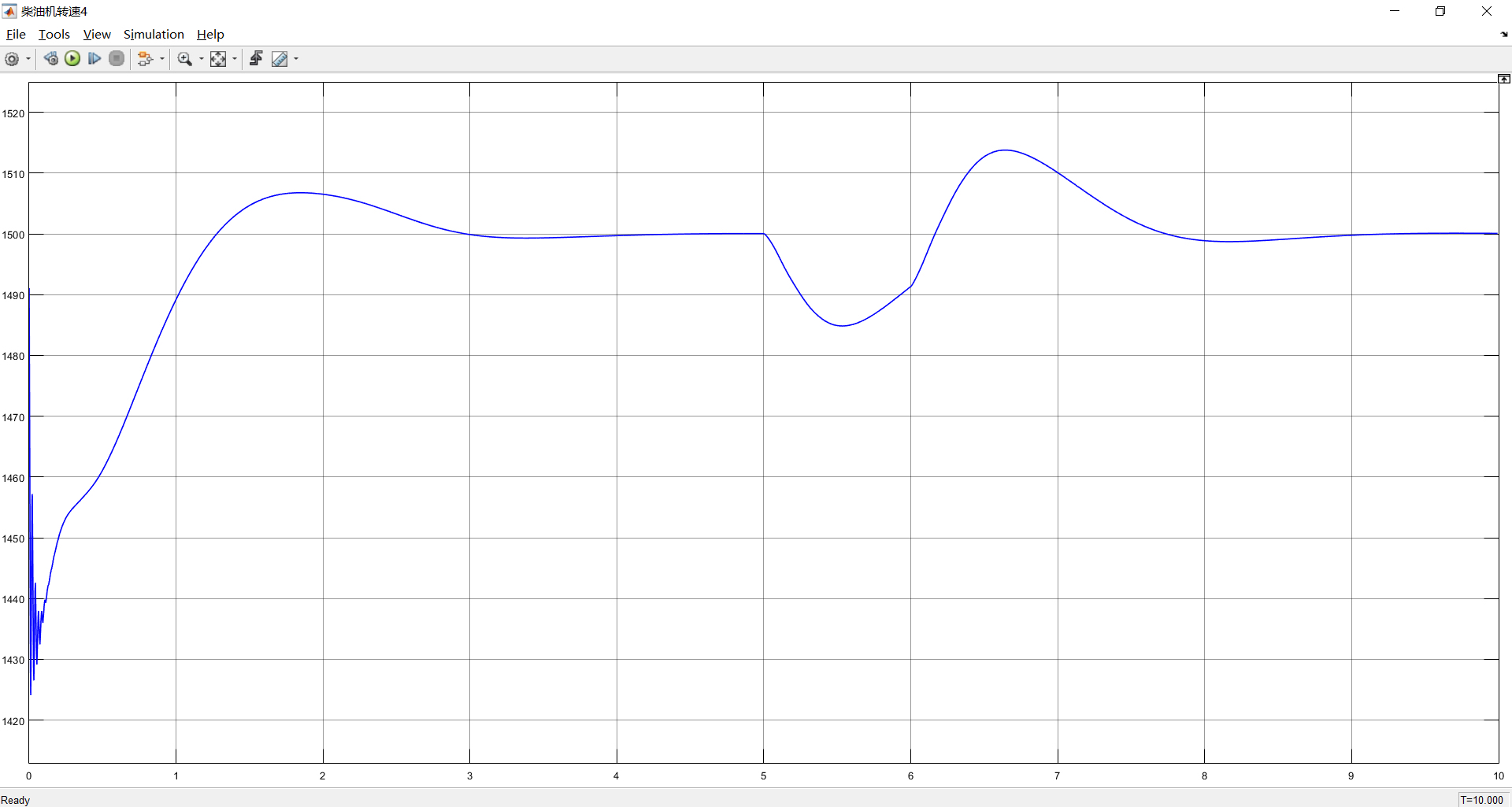
搞微电网仿真,柴油发电机绝对是核心玩家。玩过仿真的都知道,柴油机那脾气就跟重庆火锅似的——火力猛但得控制好,不然分分钟给你整冒烟了。柴油发电机仿真 Matlab Simulink 柴油发电机matlab仿真 微电网仿真 柴油发电仿真风光柴储微电网 光伏发电 柴油发电 风力发电 储能电池 光柴储微电网 风柴储微电网 风机光伏柴油储能微电网。正常情况应该是:光伏白天C位,柴油机夜间值班,电池全天候救火
一套完整的,主要用于半导体制造过程中的晶圆测试数据展示和分析。
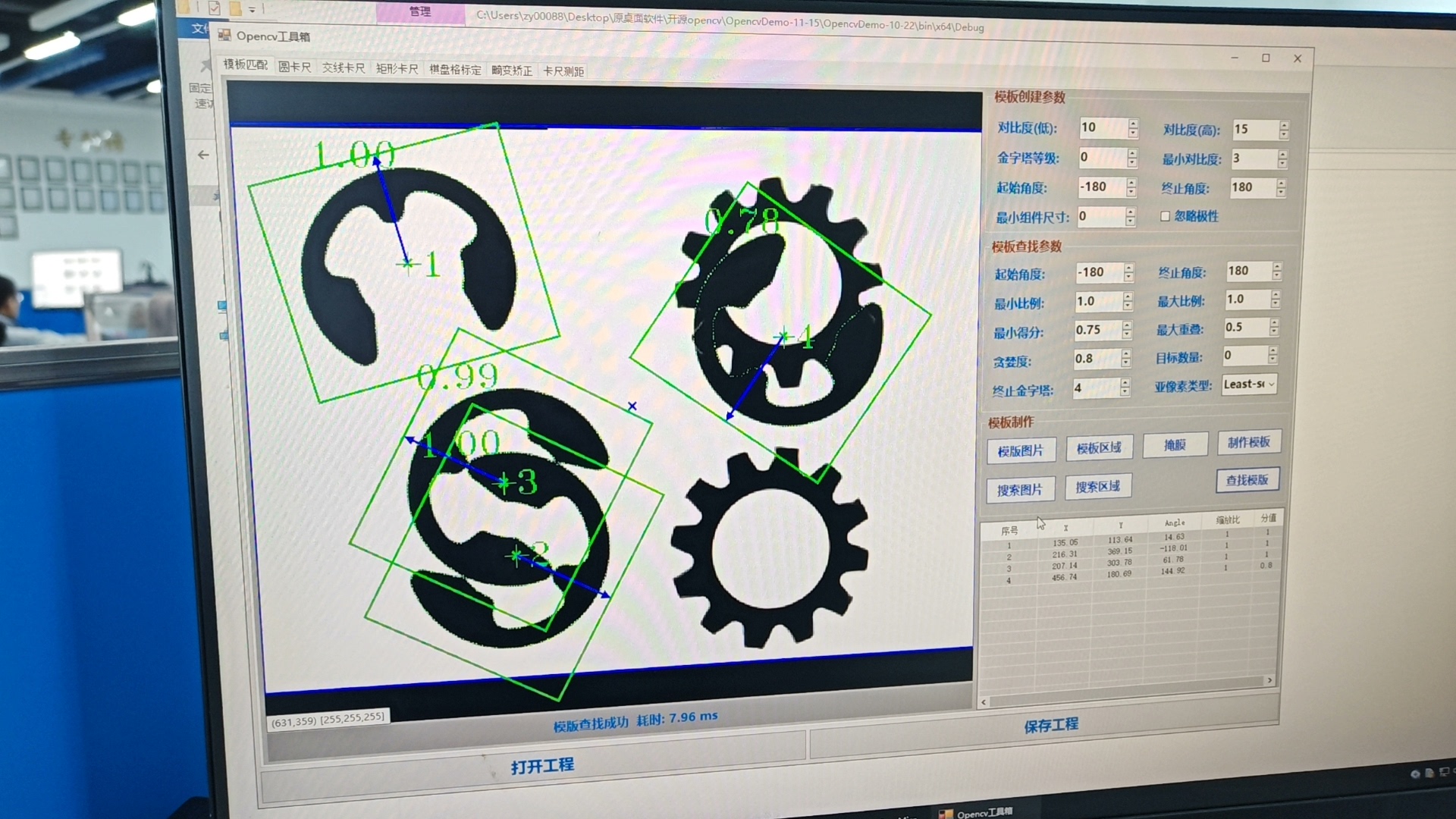
这是一个功能完整的工业视觉测量解决方案,基于OpenCV C#开发,从实际工业检测项目中剥离而来。工具采用模块化设计,通过多标签页界面集成了六种核心视觉测量功能,每个功能模块都包含完整的参数配置、可视化操作和结果展示体系。这个OpenCV C#视觉测量工具代表了工业级视觉软件的典型设计思路:功能完整而不失灵活性,算法先进而保持实用性。通过深度分析其代码结构和功能实现,我们可以看到现代视觉测量软件的
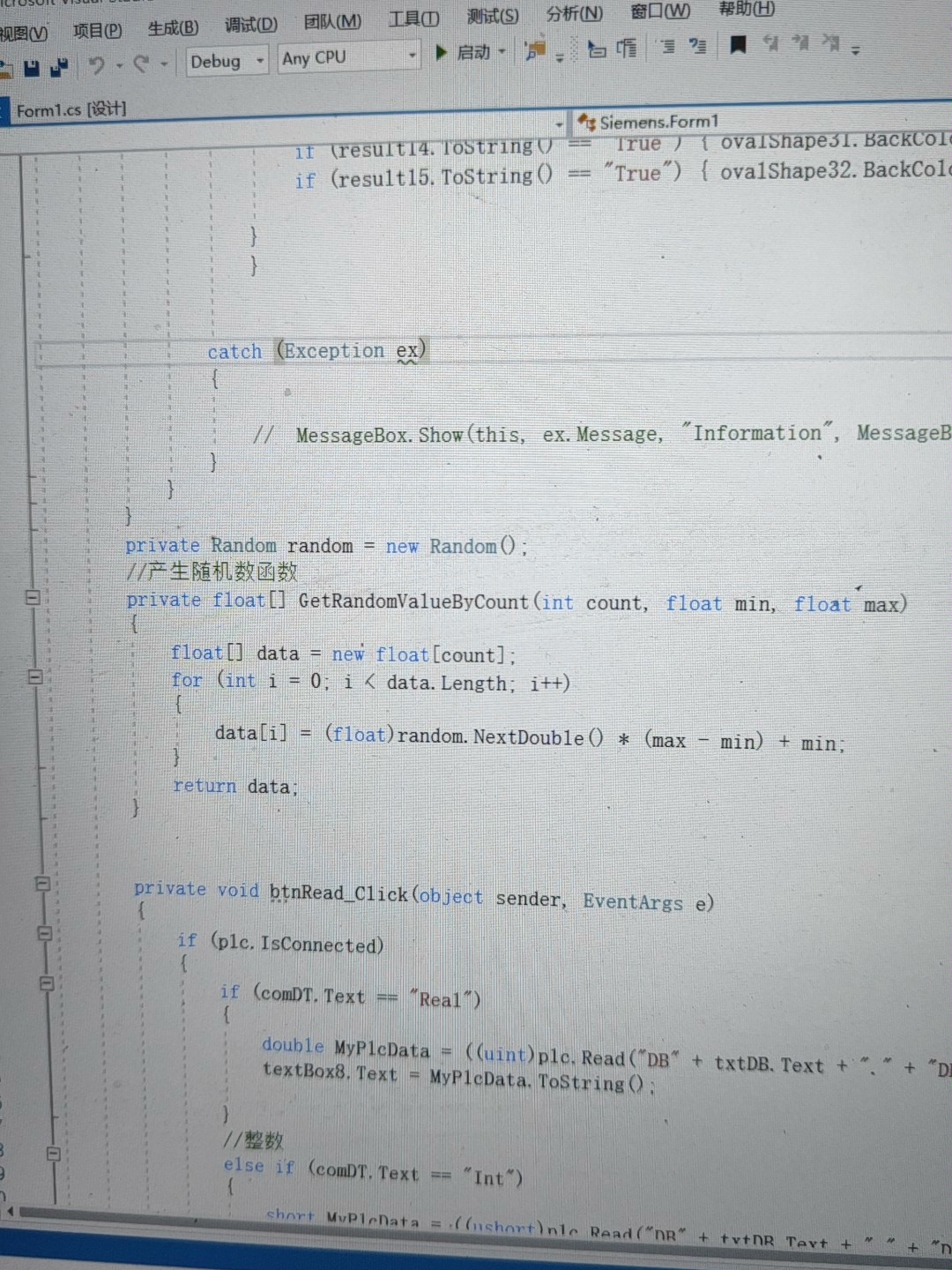
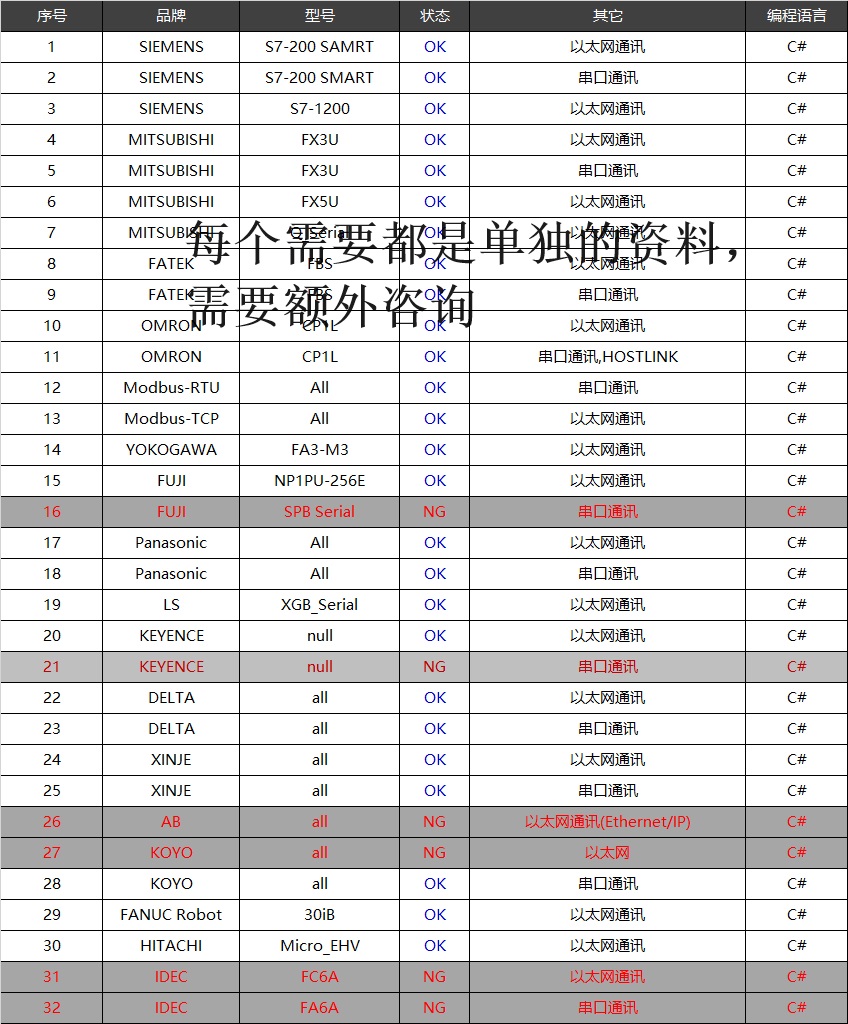
西门子S7系列PLC C#上位机通信系统是基于Visual Studio 2017开发环境,采用C#语言构建的Windows窗体应用程序。该系统依托S7.Net通信库与HslControls控件库,实现了对西门子S7全系列PLC(涵盖S7-200、S7-200 SMART、S7-300、S7-400、S7-1200、S7-1500)的通信管理。系统核心功能包括PLC连接配置、实时数据监控、寄存器读
本框架以“零驱动、零 OPC、即插即测”为设计哲学,为 S7-200 SMART 系列 PLC 提供基于 PPI 串口协议的“裸机”通讯能力。框架内部维护一张“地址-偏移”哈希表,覆盖 S7-200 SMART 全部系统区与 V 区。本框架把“PPI 协议黑箱”转化为“C# 对象仓库”,让工程师聚焦于业务逻辑而非位运算。“Open 即握手,Read 即变量,Write 即结果——其余交给 XZBN
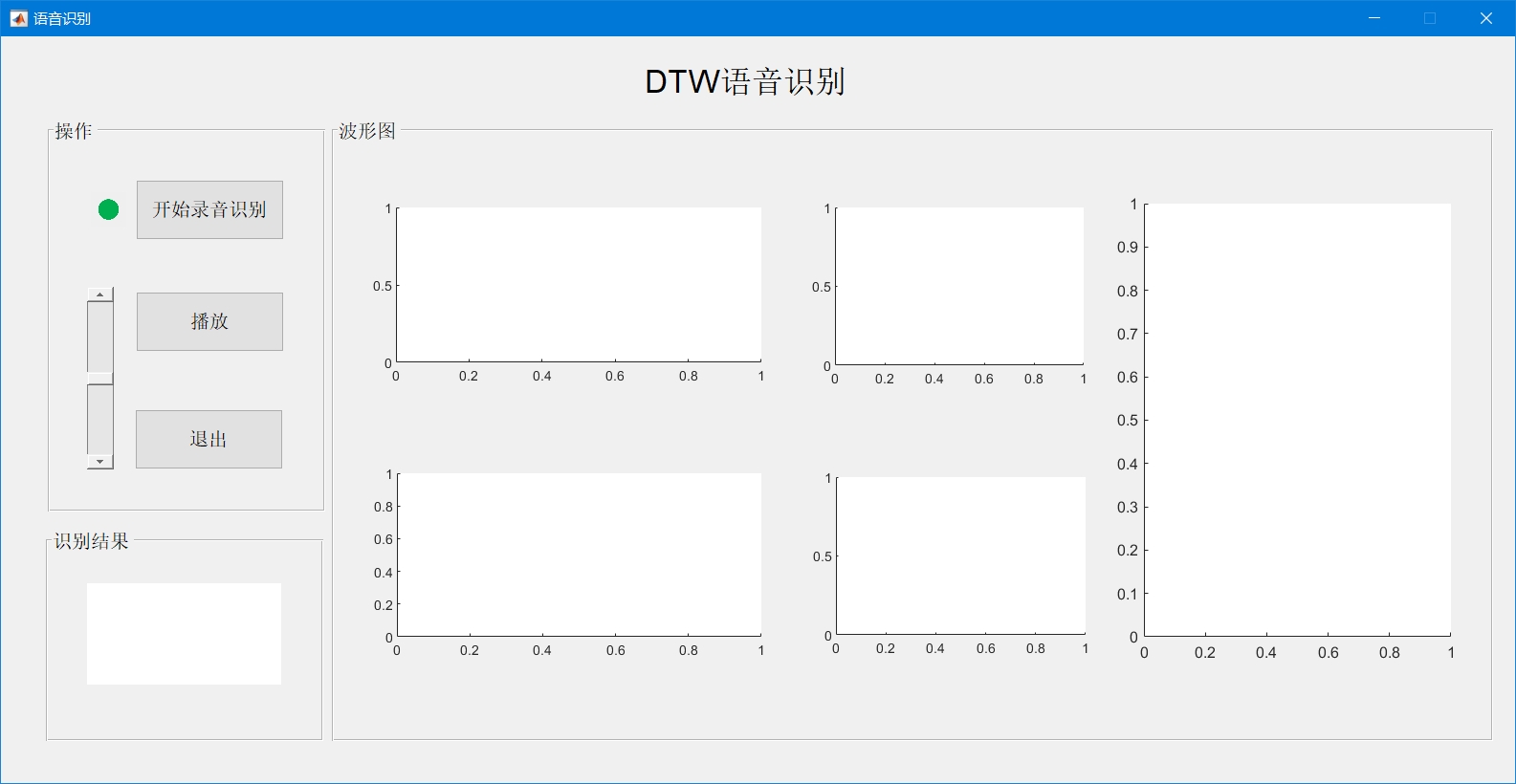
本系统是基于MATLAB平台开发的特定人孤立词语音识别系统,核心功能为识别0-9共10个数字语音。系统采用动态时间规整(DTW)算法实现语音特征匹配,结合梅尔频率倒谱系数(MFCC)提取语音关键特征,通过图形用户界面(GUI)提供直观的人机交互,涵盖语音采集、预处理、特征提取、模板训练与识别全流程,可满足基础数字语音识别场景的功能需求。
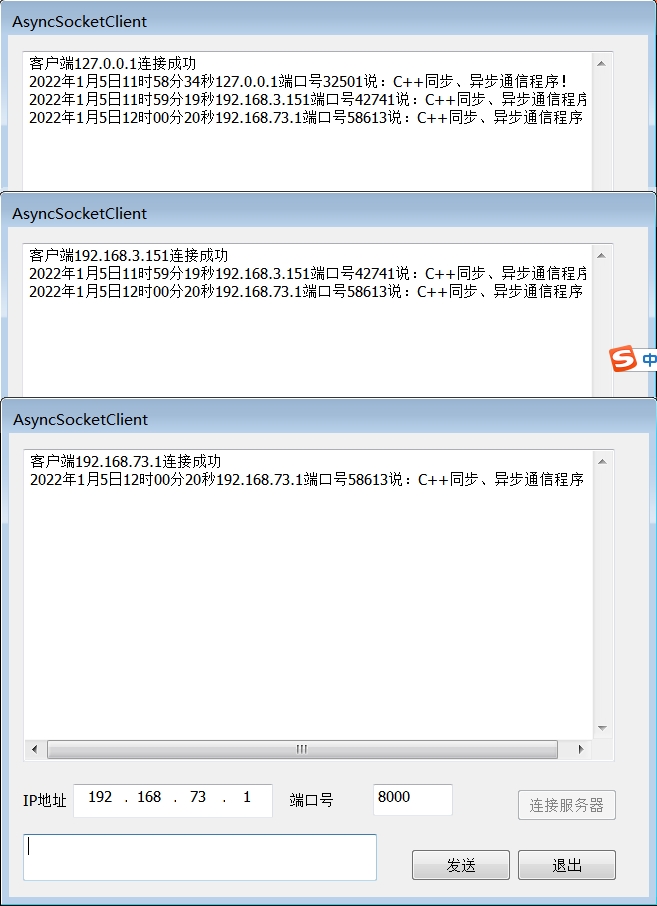
A: WSAAsyncSelect 本质仍是消息泵,建议把业务线程拆出,UI 只负责 PostMessage 刷新。若客户端规模 >500,可将 WSAAsyncSelect 替换为完成端口,保留现有消息层接口,UI 线程零改动。客户端关闭窗口→closesocket→服务器 FD_CLOSE→从链表删除→在线人数-1→UI 实时刷新。1、C++SOCKET同步阻塞、异步非阻塞通信服务端、客户端代
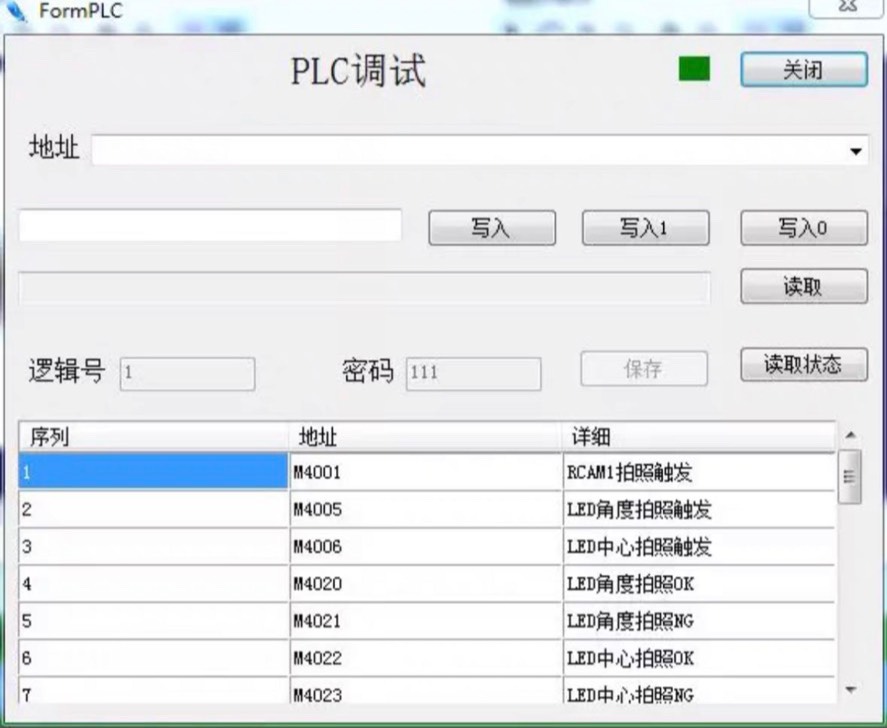
台达PLC串口通信上位机系统基于C#语言与.NET Framework 4.7.2框架开发,采用Modbus RTU通信协议实现与台达PLC的实时数据交互。系统集成了串口参数配置、PLC数据实时读取、数据写入及自定义数据订阅等核心功能,通过可视化界面直观呈现PLC内部寄存器(X、Y、M、D区)状态,适用于工业自动化场景中对PLC设备的远程监控与控制。

想要源码的老铁直接私信,这框架特别适合需要快速落地视觉项目的场景。自己魔改了几个版本用在不同的项目里,架构的扩展性确实顶,加新设备驱动或者视觉算法都不需要动主框架。最近在折腾工业视觉项目的时候,发现一套基于C#和Visionpro9.0的框架代码特别香。这个加权算法有意思的地方在于权重系数不是固定的,框架里会根据相机的标定误差率动态调整。先说相机定位的骚操作。C#和Visionpro9.0开发的视
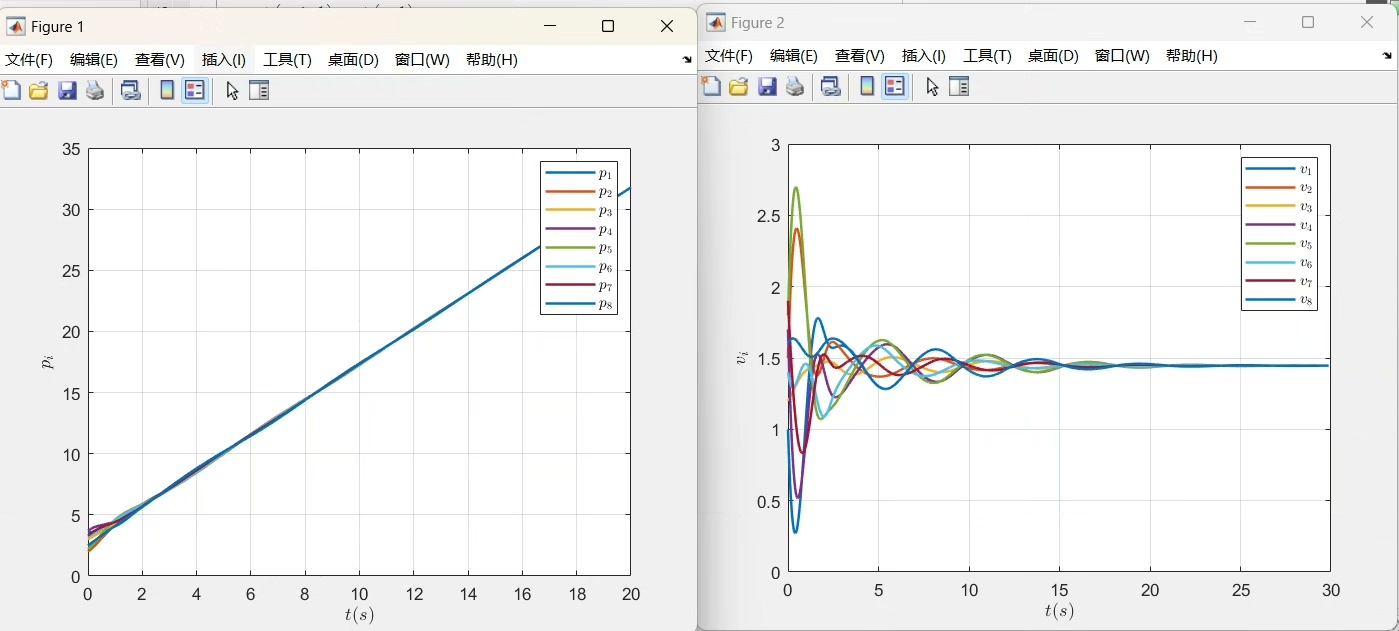
针对二阶多智能体系统在时变时延、干扰以及切换拓扑下的一致性问题,提出了二层邻居二阶多智能体快速一致性算法,运用图论、矩阵论、李雅普诺夫稳定性理论对二阶时变时延、干扰以及切换拓扑的多智能体系统一致性问题进行分析,通过变换将研究多智能体系统的一致性问题转换为研究系统的稳定性问题,构造新型的 Lyapunov-Krasovskii 候选泛函,给出了新的系统实现稳定性的充分条件。复现包括改进算法和传统算法