- @onvadhFTH
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
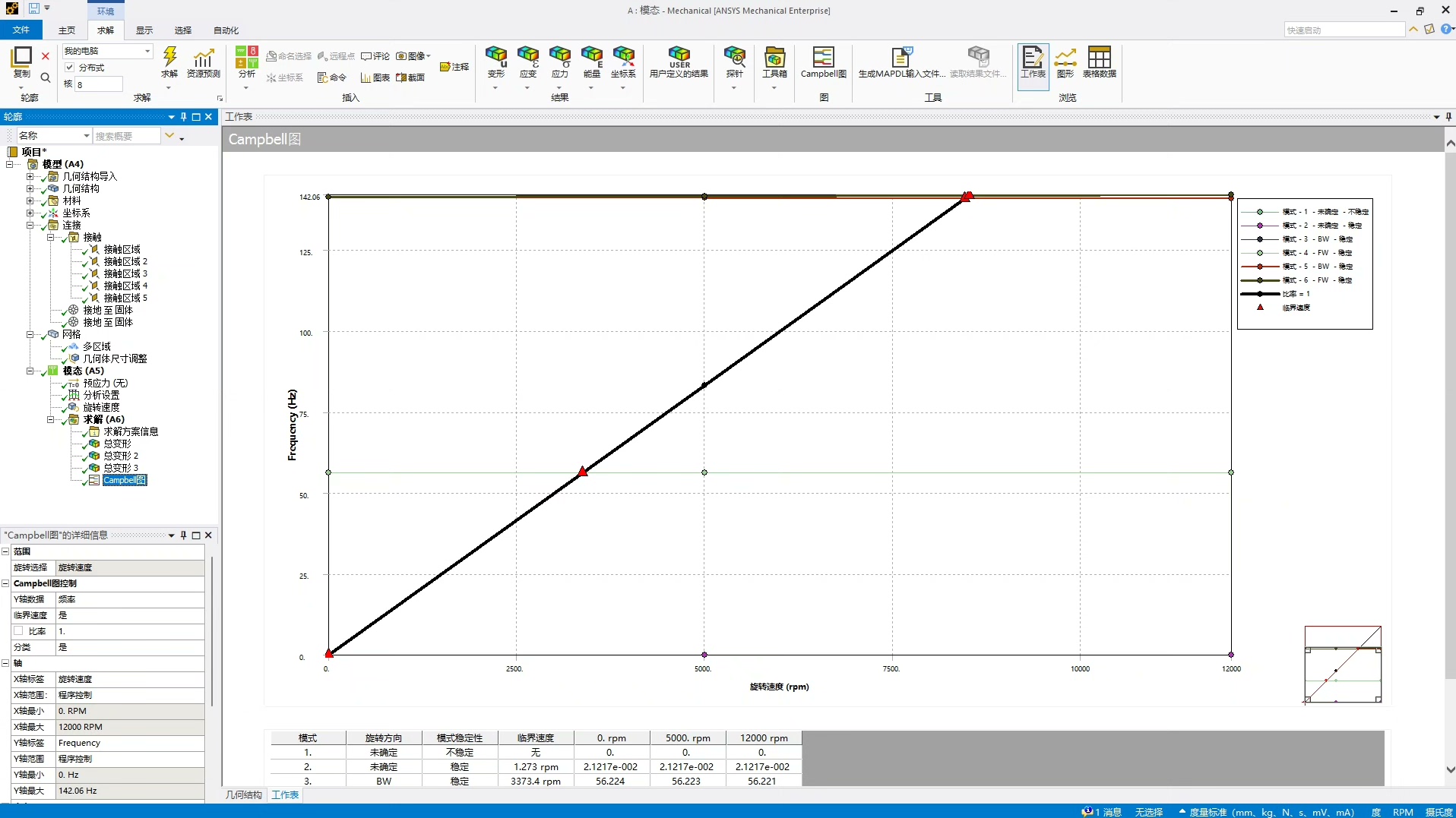
在Workbench后处理里点几下生成这个神器,你会看到三条妖娆的曲线:蓝色的是固有频率随转速变化,红色的是1倍频线,绿色的是2倍频线。在工厂里那台嗡嗡作响的鼓风机又双叒叕出问题了,轴承温度异常升高时老师傅叼着烟说了句:"这转子怕是遇上临界转速了"。就像相亲照和真人差距太大,模型和实物之间,永远隔着一条叫"简化假设"的鸿沟啊。这时候要特别注意第三阶模态,它的频率线刚好在3000转时和1倍频线亲密接
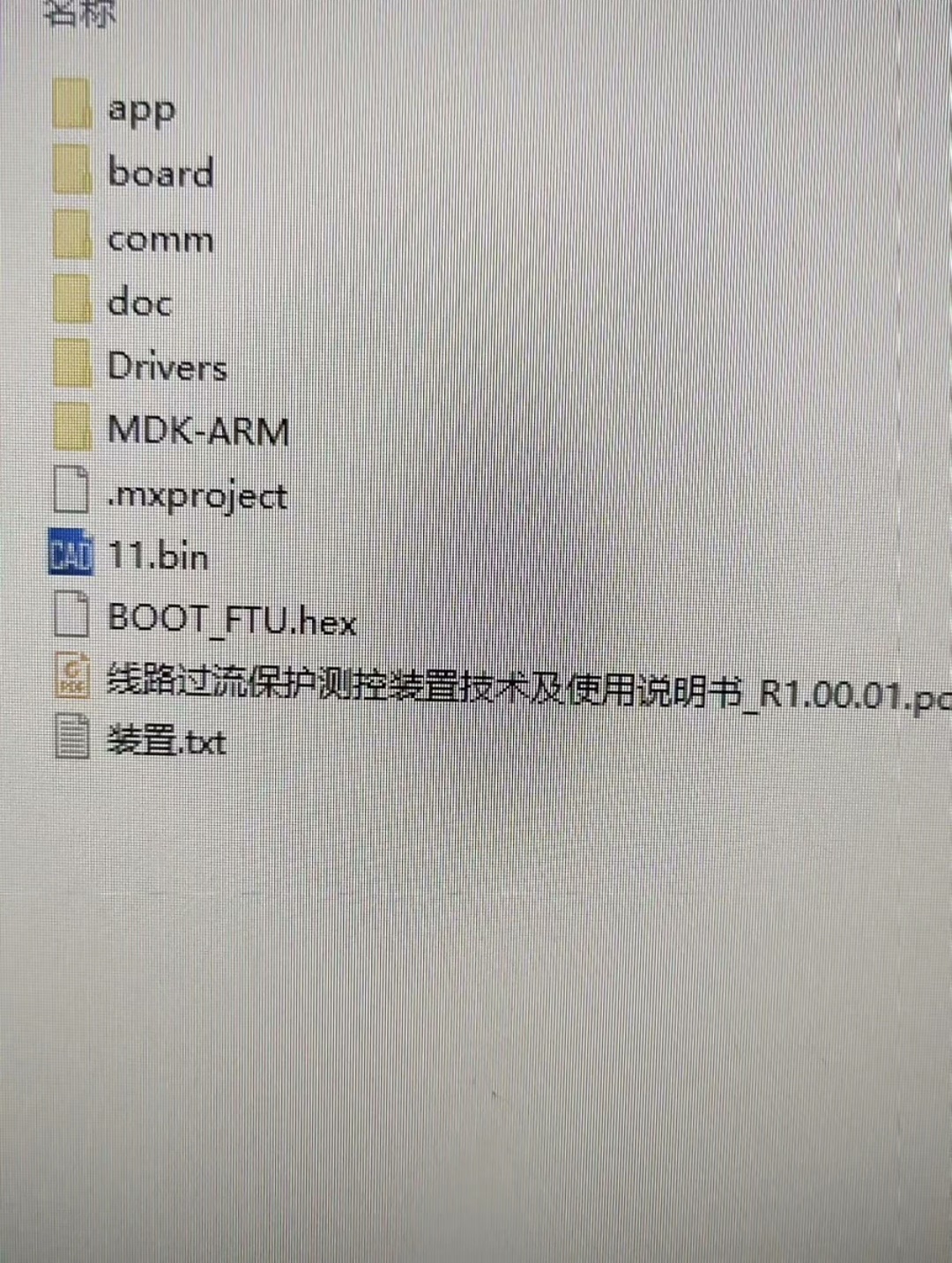
10kV线路微机继电保护装置源代码,配套pcb图纸和bom。适合自己学习的素材,也可作为基础版本工程,缩短开发周期。商品为源码和pcb图,在电力系统领域,10kV线路微机继电保护装置起着至关重要的作用。今天就来和大家聊聊我最近发现的超棒素材——10kV线路微机继电保护装置源代码,配套的PCB图纸以及BOM(物料清单)。
CMSIS DSP库(Cortex Microcontroller Software Interface Standard Digital Signal Processing Library)是面向ARM Cortex-M系列处理器的开源数字信号处理库,为嵌入式系统中的信号处理任务提供高效、优化的算法支持。
这个系统设计了普通用户和系统管理员两个角色,各自承担着不同的使命。普通用户功能在线物流联系:方便用户直接与物流相关方取得联系,沟通货物运输等事宜。查询订单:随时追踪自己订单的状态,从下单到运输再到派送,全程了如指掌。在线加好友:有点类似社交功能,方便用户之间交流物流相关经验等。查看新闻资讯:了解行业动态、优惠活动等信息。系统管理员功能新闻管理:发布、编辑、删除各类新闻资讯,让用户获取最新信息。加好
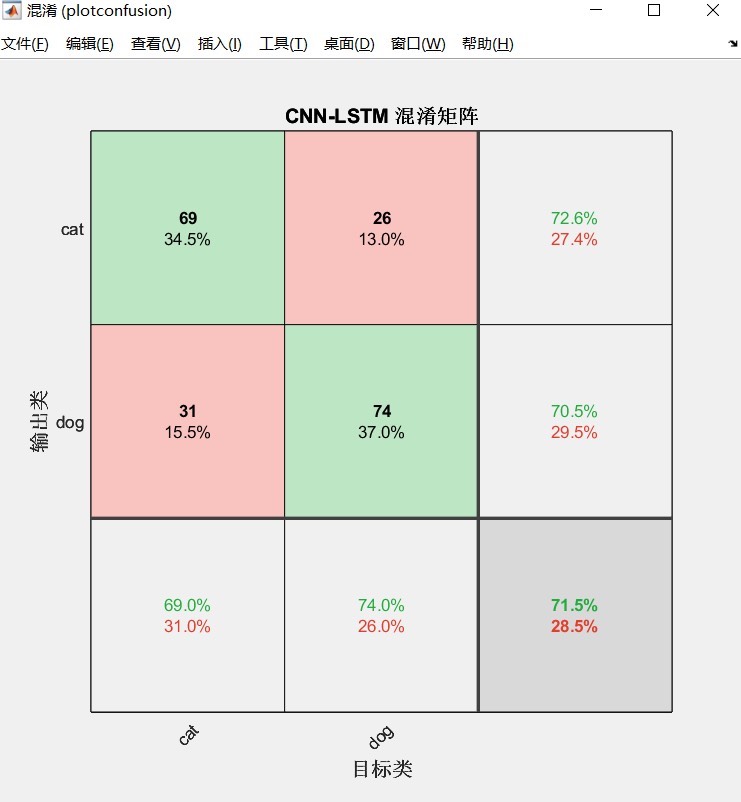
网络结构才是重头戏。注:本程序只是帮助大家参考如何在Matlab中搭建CNN-LSTM模型,用的卷积核数量很少,LSTM隐含单元数目也非常少,故本实验结果较差。注:本程序只是帮助大家参考如何在Matlab中搭建CNN-LSTM模型,用的卷积核数量很少,LSTM隐含单元数目也非常少,故本实验结果较差。按4:1比例随机划分训练集和测试集,训练集为400只猫400只狗,测试集为100只猫和100只狗。按
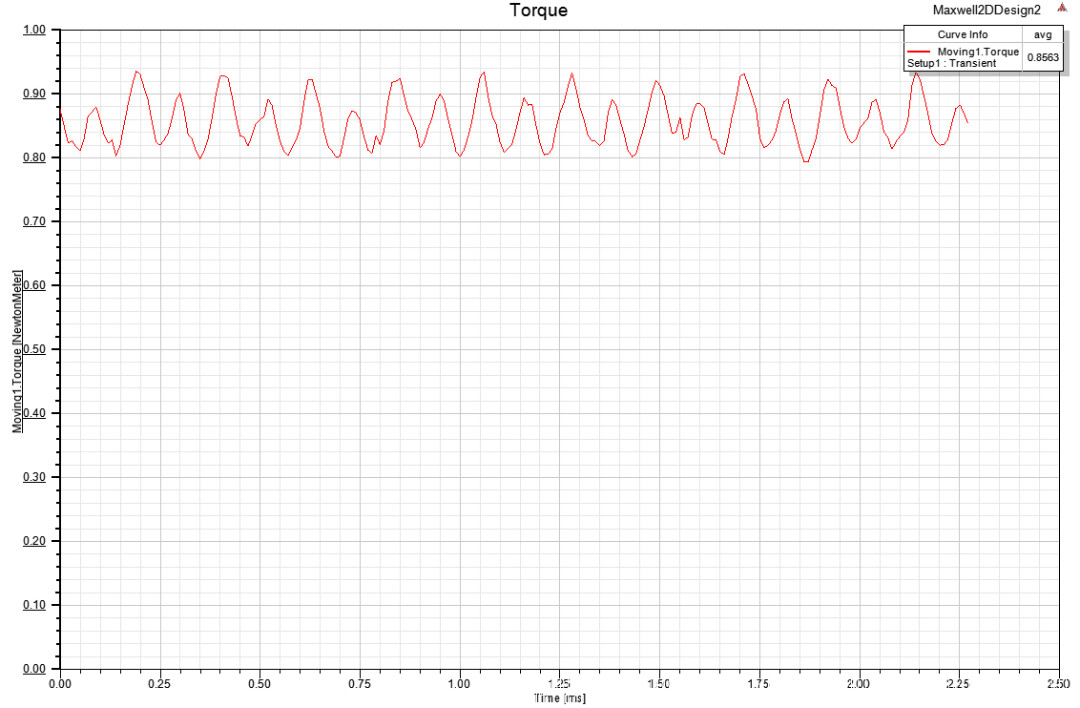
本文通过一个24V、200W PMSM的设计案例,展示了从参数分析到硬件实现的全过程。通过磁场仿真和驱动电路设计,确保电机在额定条件下高效运行。同时,考虑到实际应用中的散热和体积限制,优化了电机的结构设计。这种设计思路可以推广到其他永磁同步电机的开发中,为工业自动化提供可靠的动力解决方案。基于maxwwell设计的经典200W,2200RPM 外转子,直流母线24V,42极36槽,定子外径81.5
通过这个项目,我们不仅体验到了OpenCV的强大功能,还实现了手势控制的实际应用。当然,这个项目的可扩展性很强,只要你有创意,就可以用同样的思路实现更多有趣的功能。如果你对这个项目感兴趣,或者有其他问题,欢迎随时交流!一起动手做项目,才是最好的学习方式!
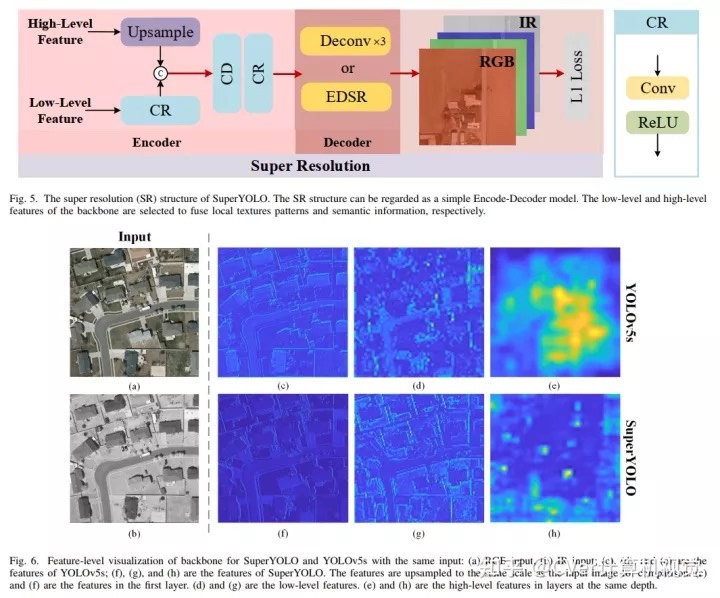
最后放个精度对比彩蛋:在DOTA遥感数据集上,同样的YOLOv8框架,加入SuperYOLO改进后,mAP从63.1直接飙到71.4。这里有个细节处理很妙——不同模态的特征先各自过SPPF金字塔池化,再做通道注意力融合,比粗暴concat后再处理省了三分之一的显存。支持yolov5,YOLOv7,YOLOv8优化改进,加入注意力机制多尺度,transform等提升精度。支持yolov5,YOLOv
基于Arduino的温室大棚环境监测与控制系统:1.使用DHT11温湿度传感器,实时监测大棚温湿度,数据一方面实时显示在OLED屏,另一方面上传手机APP,湿度过低时自动控制加湿器进行加湿,达到一定湿度后停止加湿(加湿过程中,可以物理性关闭),温度过高时,可通过手机蓝牙控制风扇进行降温;2.SGP30气体传感器,实时监测大棚内二氧化碳浓度含量和TVOC(空气质量),数据显示在屏幕上,可通过手机蓝牙

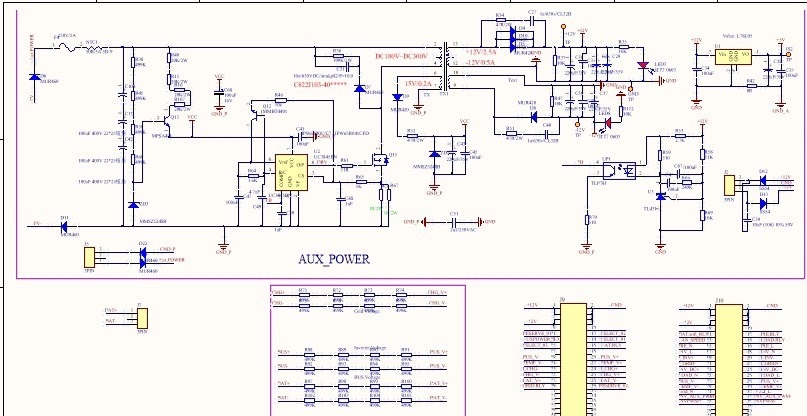
别小看这个经典款Cortex-M3内核芯片,人家ADC采样速度1μs,12位精度够用不说,关键是用它开发就像吃火锅配麻酱,顺手得很。要说这个方案的杀手锏,还得是那套基于事件触发的中断架构。过压保护不走软件判断,直接用片上比较器硬件触发保护,响应速度直接从毫秒级干到微秒级,这波硬件加速666。描述:本方案为AD格式原理图,PCB,源代码,适用于户用储能系统,提供完善的通讯协议适配BMS和上位机。描述