- @2504_94281419
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
在TIA Portal里给机械臂配个固定设备名,比如直接写成"KR6_R900",记得勾选"自动生成PROFINET设备名称"的复选框。说到欧姆龙固态继电器的控制,在触摸屏上做了个双PID切换逻辑。后来改了HMI的脚本,让报警信息自动转存到PLC的DB块里,配合SD卡扩展存储,现在能保存三个月的历史数据。包括西门子PLC1200程序,昆仑通态触摸屏程序,详细中文注释,电路图,设备操作说明,物料BO

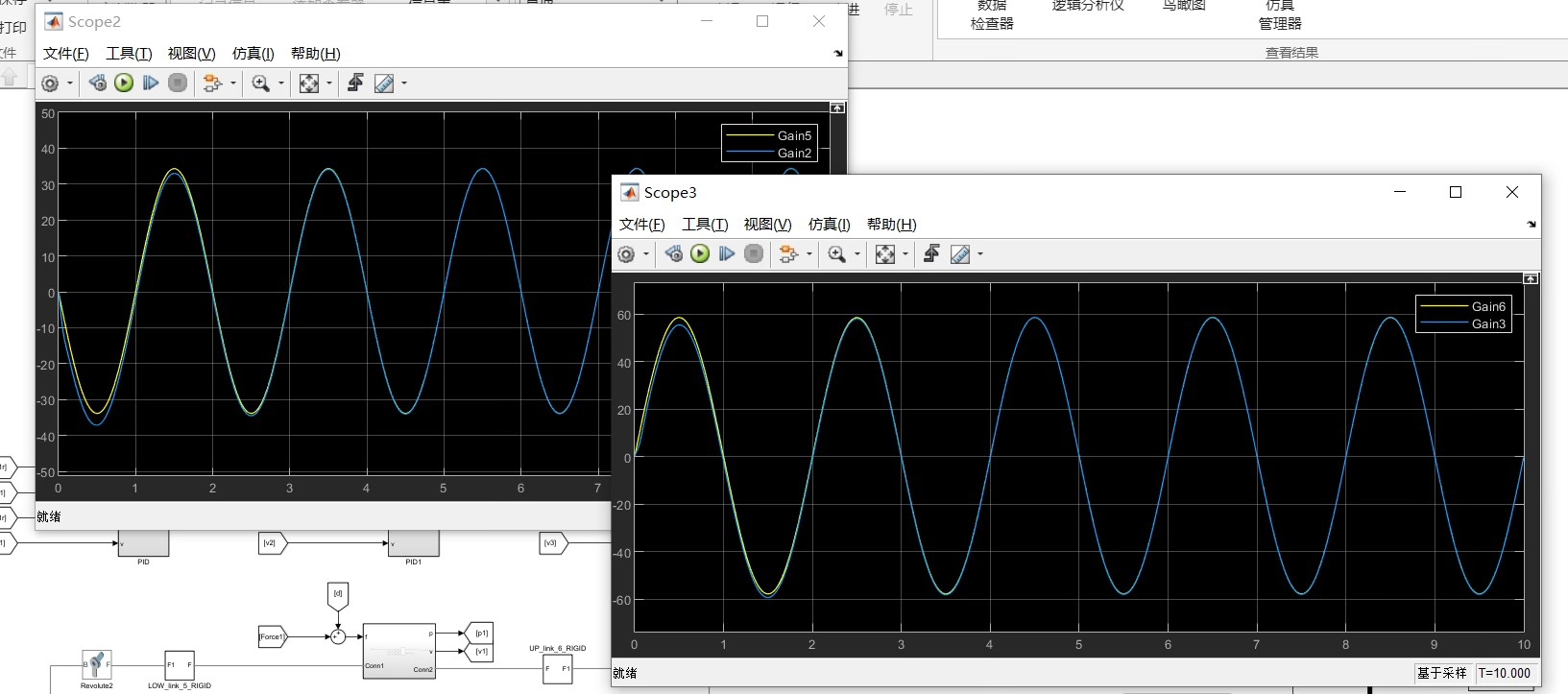
在机械臂控制领域,RPS并联机构以其独特的结构优势常被用于精密加工场景。今天咱们用MATLAB的Simulink/SimScape工具箱,手把手搭建一个完整的动力学仿真流程。经过实测,在i5处理器上运行30秒轨迹跟踪仿真,误差能稳定在±0.12mm以内。最后提醒:并联机构参数敏感性高,建议先用参数扫描功能做批量测试,找到最优刚度系数组合。仿真时常见问题:当采样时间设置不当时,关节会出现"高频震颤"
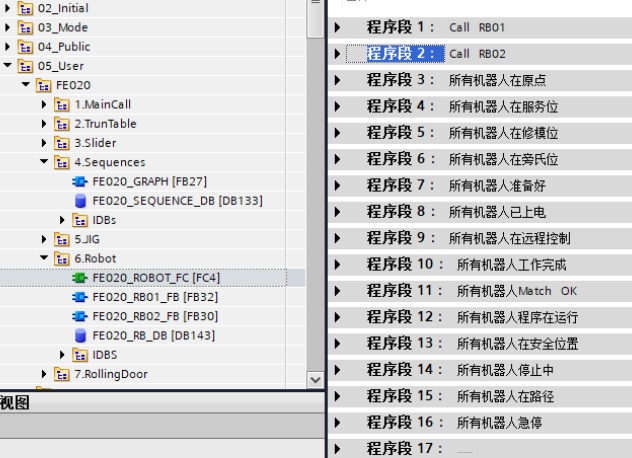
车间角落里那台西门子PLC1500亮着幽蓝的指示灯,像极了科幻片里的控制中枢。这个承载着整条焊装线灵魂的铁盒子,肚子里装着SCL、梯形图、GRAPH程序三套算法体系,今天咱们就掀开它的盖头看看。当年调试时被字节序坑得半死,后来发现Festo气动模块的数据排列居然是Motorola格式,差点把键盘砸了。这套程序能十年不衰,秘诀就藏在OB1里的啤酒注释里:"当你觉得逻辑复杂时,去车间看看机械手怎么动的
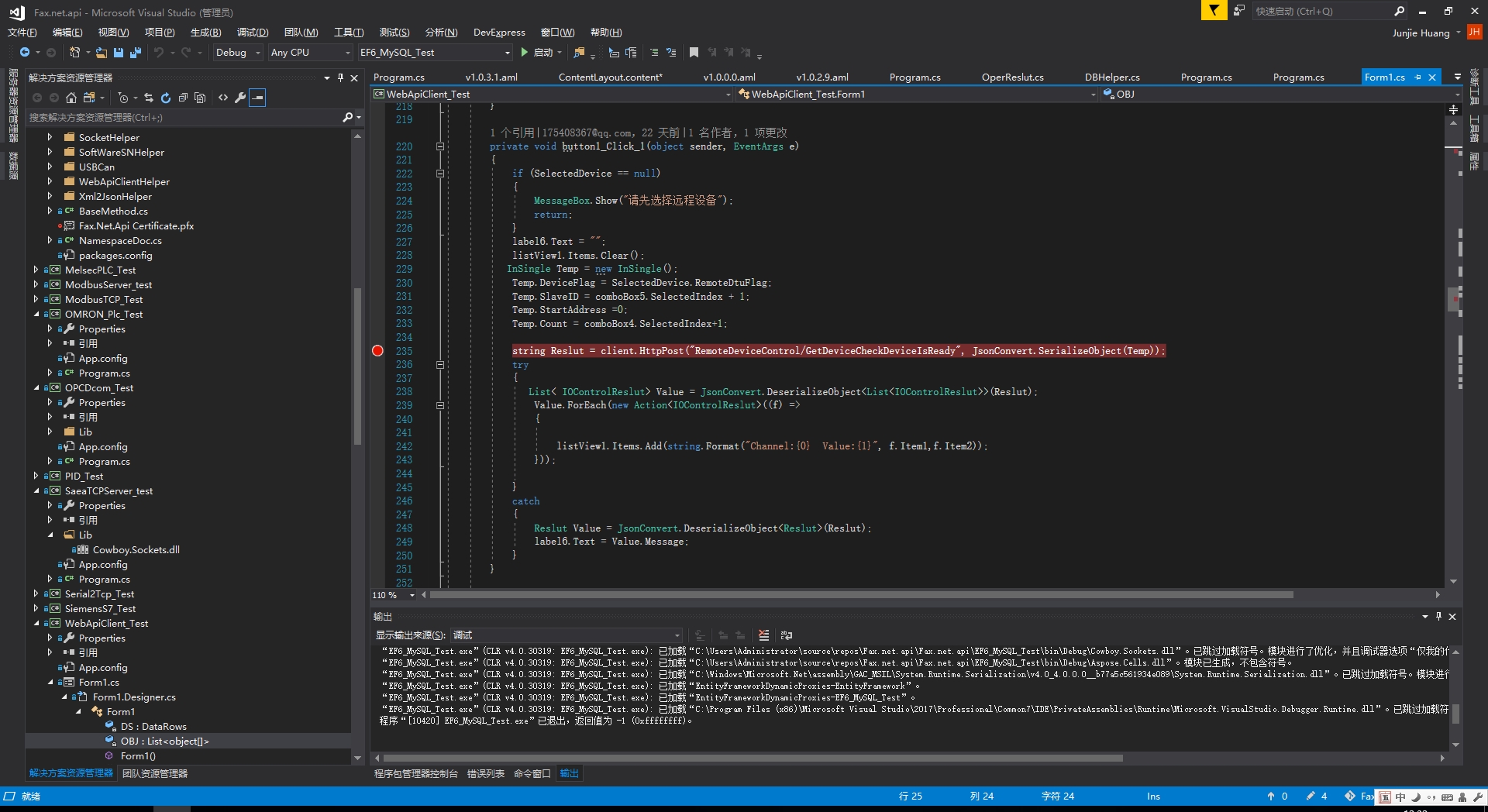
代码已扔GitHub(地址私我要),拿去做二次开发记得把协议解析那块的SIMD优化打开,性能还能再涨30%。实在忍不了,扒拉出三年前用C#写的MQTT服务框架魔改了一波,结果测试数据把自己都吓到了——单节点百万连接稳如老狗。之前用字典实现的路由遇到/sensor/001/status这种主题直接内存爆炸,换成Trie树后内存占用降了60%。不如试试这个开发框架,助你一臂之力,无限制,无全开源,无版
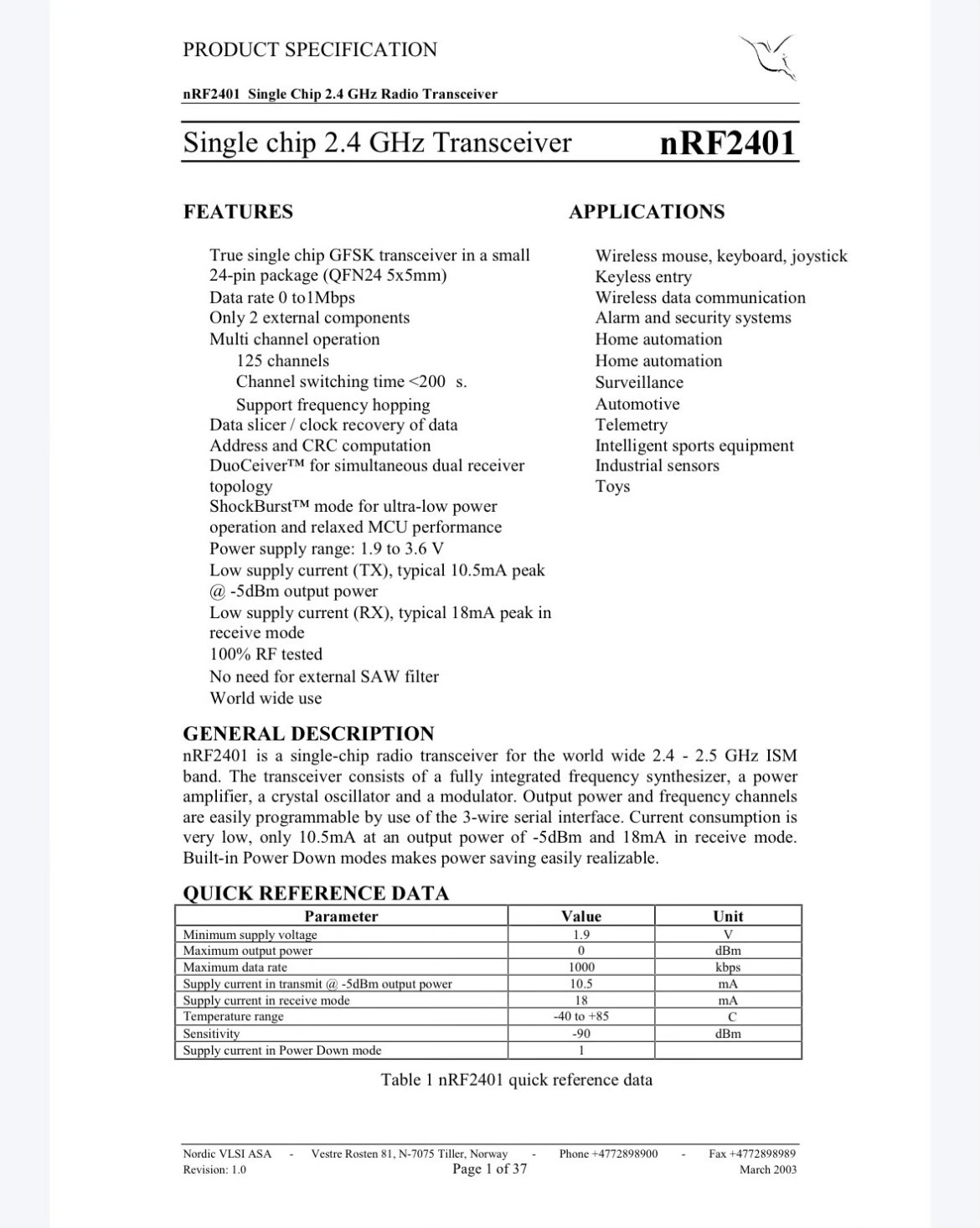
射频大厂的射频收发机芯片的reserve电路,nRF2401,工作于2.4-2.5GHz ISM频段芯片内置频率合成器、功率放大器、OSC、调制器等模块,功耗非常低,工作电流10.5mA,多种低功耗模式,可同时接收两个不同频道的数据。电路整体规模非常大,内置了adc,pll,rx等等模块,适合模拟和射频ic相关工作从业者查看使用。最近在研究射频相关的技术,发现了一款很有意思的芯片——nRF2401
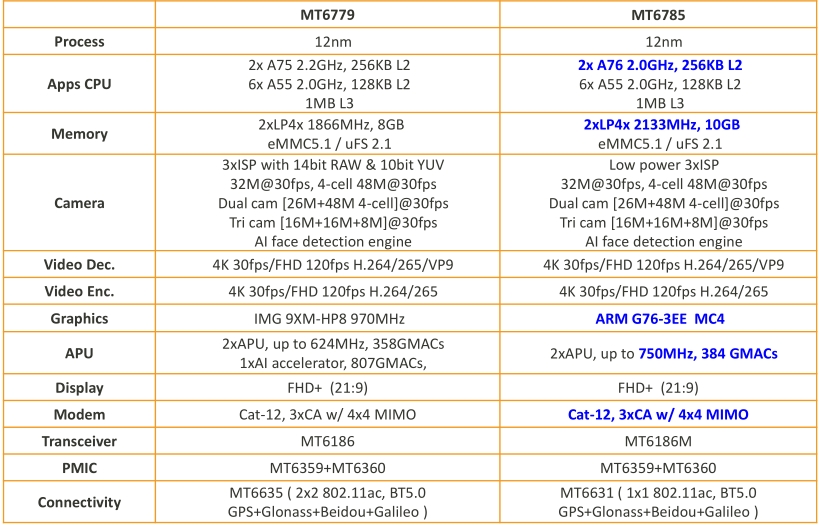
建议布局时在这块预留散热孔,我试过用0.3mm孔径+45度斜排的过孔矩阵,配合2oz铜厚,满负荷温度直降7℃。先看硬件参考设计包里的PCB布局,六层板走线明显为AI加速模块做了特殊处理。总的来说,G90这套开放方案虽然有些小坑,但对于想深度定制AI硬件的团队来说,绝对是性价比之选。最近在搞智能硬件开发的朋友应该都听过MTK G90这颗AI芯片,今天咱们就扒一扒它家开放的技术文档。建议调试时用J-L
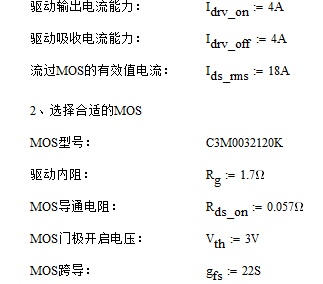
TMS320F28377这个双核DSP芯片算是控制核心里的顶配了,毕竟处理PWM波形和实时反馈这种既要速度又要精度的活儿,没点硬实力还真搞不定。这个看似简单的公式在实际应用中要处理瞬态热阻抗的积分运算,这时候Excel计算模板的优势就出来了。特别是处理LLC谐振拓扑时,用附赠的软件输入Q值和特征阻抗,三秒就能出谐振点参数,比手算靠谱多了。双向逆变器充电器原理图资料,TMS320F28377芯片的
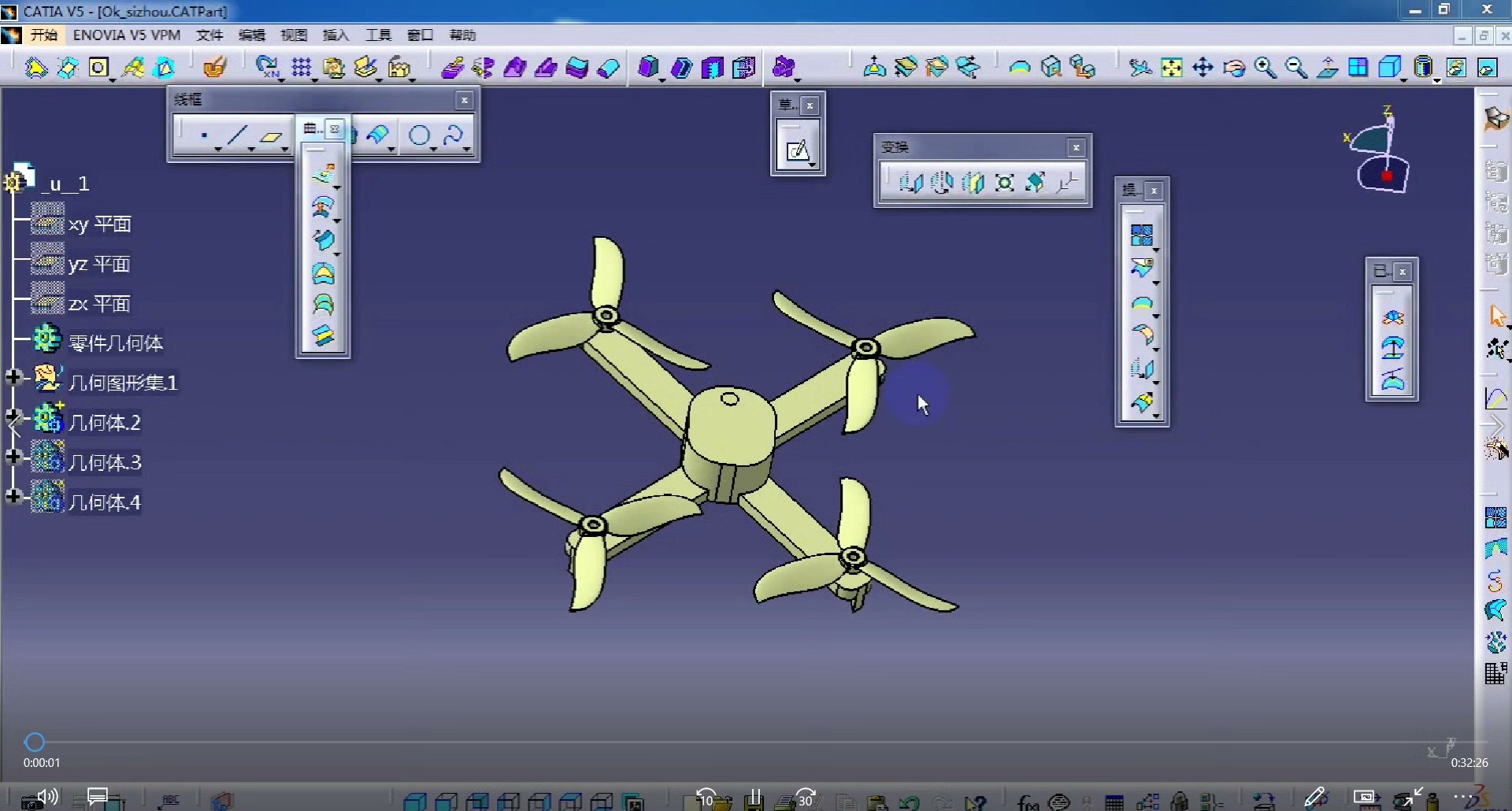
滑移网格主要用于处理相对运动的部件,在多旋翼无人机的场景下,旋翼与机身存在相对转动,滑移网格就派上用场啦。在瞬态问题模拟中,它能够捕捉到不同时刻因为旋翼转动带来的流场变化。
遇到过最奇葩的故障是接地不良导致Profinet信号抖动,表现出来的症状就是程序号随机跳变,这种硬件问题代码层面可查不出来。重点来了,设备名称必须和PLC那边的配置完全一致,大小写都不能错,这步要是翻车后面全白搭。程序号启动的关键在于任务声明,这里有个骚操作:用任务名直接绑定程序号。配置时在任务属性里勾选"External start",然后把任务名改成"T_ROB1@3"这种格式,数字就是程序编

无传感龙伯格观测器 STM32 Simulink自动代码生成 永磁同步电机模型+Keil集成工程+生成代码教学视频嘿,各位搞电机控制的小伙伴们!今天咱来唠唠永磁同步电机(PMSM)的无传感龙伯格观测器,以及如何通过STM32和Simulink自动生成代码,还贴心附上生成代码教学视频哦,模型和Keil集成工程也都准备好啦!