- @2504_94312719
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
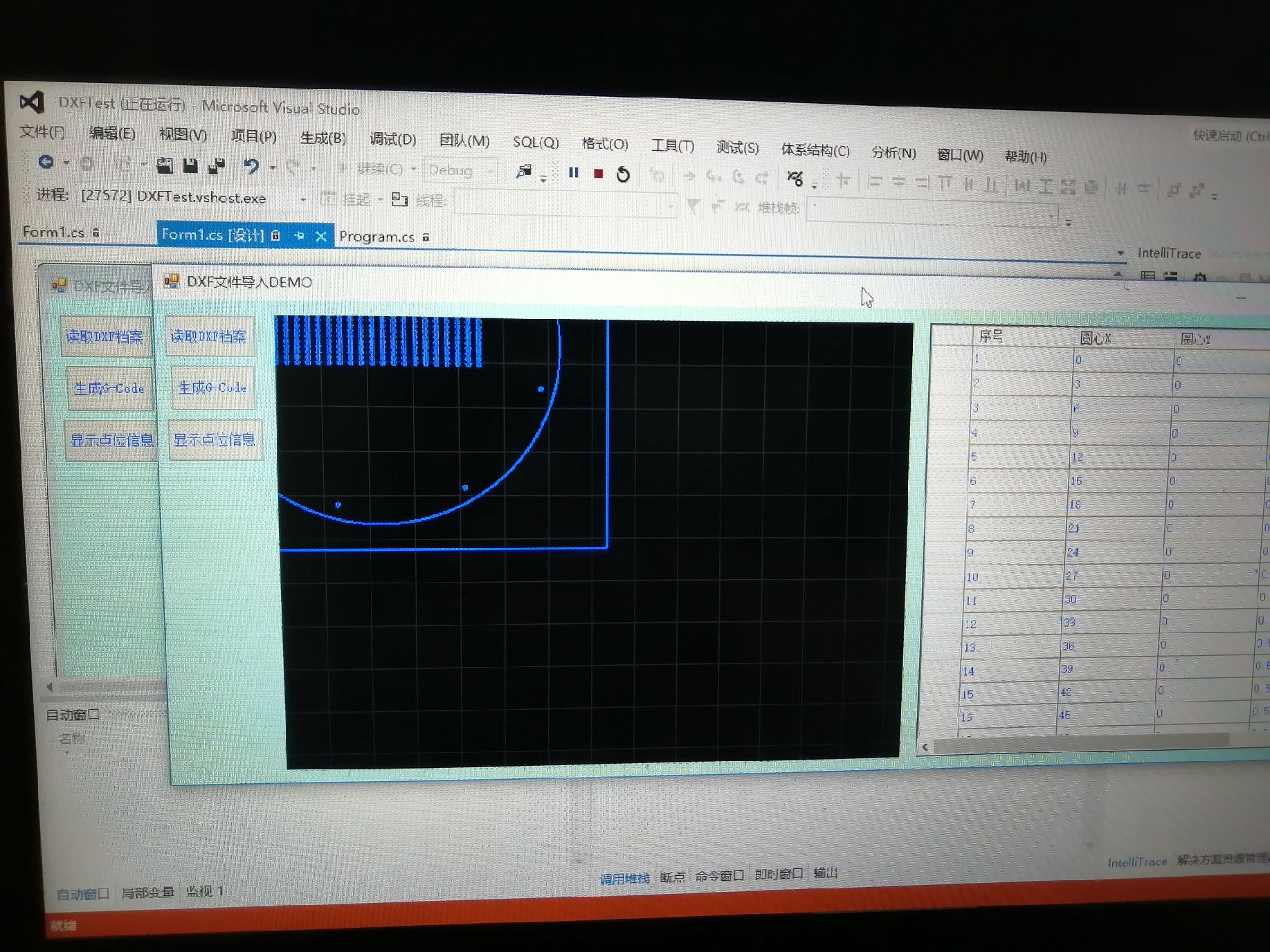
实测下来这套方案能把转换时间从原来的半小时压缩到10秒内,不过还是有需要改进的地方——比如遇到贝塞尔曲线就得手动转成多段线,后期打算集成个NURBS解析模块。搞工业自动化就是这样,每个小环节都能挖出意想不到的细节,但亲手调通的那一刻,看贴片头按自己写的路径精准跑位,成就感直接拉满。这中间需要个转换器把DXF文件里的走线路径转成数控指令,试了几个现成工具总觉得不够顺手,干脆自己用C#撸了个转换程序。
C#开发上位机。包含操作界面,监控界面,工艺流显示界面,工艺表界面,工艺编辑界面,曲线界面,异常报警界面等,操作界面,监控界面:常规点击,数字输入框,调取工艺,适合触摸屏工艺流显示界面:根据工艺步执行,变换颜色,一步一步显示工艺到哪步了!工艺表:可以导入导出已生成Excel表,也可以导成已定义后缀的加密文件。工艺编辑界面:树形编辑,避免杂乱无章!曲线:八组曲线,可调八组曲线同时显示,曲线纵坐标可自
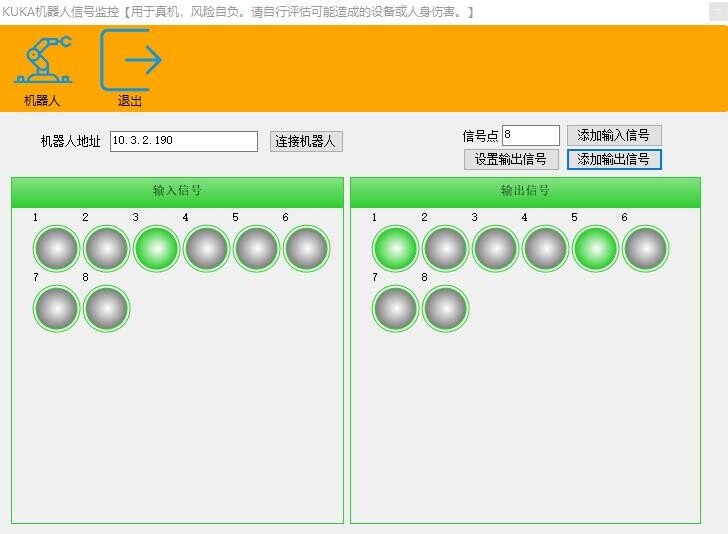
当我把自制的监控工具接入KUKA控制柜时,闪烁的红色信号灯瞬间在屏幕上定位了故障点——这个场景就是我开发C#上位机的初衷。这段代码的精髓在于事件绑定的匿名委托——当创建数十个信号按钮时,每个按钮都能准确记住自己的信号名称。当机械臂再次故障时,那个自动弹出报警信号的红色面板,就是动态控件技术的最佳实践。通过事件驱动机制,当PLC信号变化时,只需更新Value属性,关联的UI控件就会自动刷新。3、软件
比如充电器设计中故意让轻载时进入DCM模式降低损耗,这时候Mathcad的变量联动功能就派上用场了——修改负载电阻值时,所有关联参数实时更新,比Excel的循环引用可靠多了。这种条件式参数输出能省去大量查表时间。不过别忘了,实际选型时得考虑散热条件,Mathcad里可以加个温升估算模块,避免纸上谈兵。反激变压器参数自动计算mathcad,连续模式CCM,断续模式DCM,送反激开关电源电路解析资料p
成熟FOC电机控制STm32F0全C程序,全开源。资料含:电路图,PcB文件及c程序。主要于电动自行车,电动三轮车等,有感控制。直接可用,不是一般的普通代码。也可以自行移植到国产32位芯片上。本代码有以下功能:转把,高中低三速,上电防飞车,EABS电子刹车,有欠压超压检测,多种巡航功能,也可与铁塔王通讯、一键通、隐形限速、防盗功能;是完整功能的程序。各位电子爱好者、嵌入式开发的小伙伴们,今天要给大
BMS在电池管理系统里相当于大脑的角色,而Simulink就是给这个大脑搭神经网络的神器。直接甩开那些繁琐的手写代码,咱用模块拖拽就能把算法安排得明明白白。放电时更刺激,突然有个单体电压暴跌就得启动负载切除,这时候看状态机的跳转速度能到毫秒级。这个库仑计法代码直接能生成C代码,注意里面的持久变量相当于静态变量。充放电控制的状态切换(图三图四)特别像打游戏切大招。最后交付的东西(图五)除了模型文件,
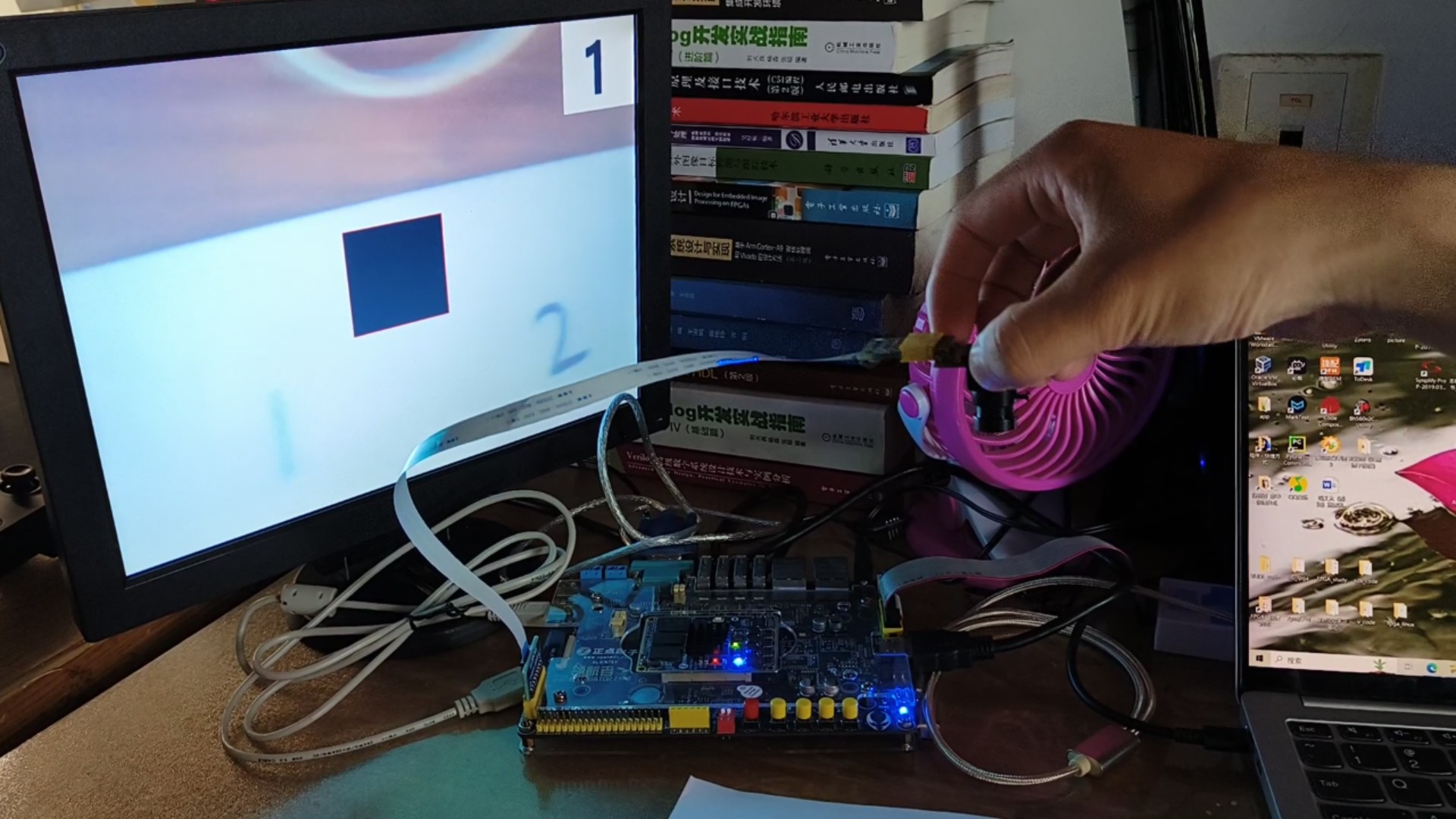
工程移植到其他板子时,最烦人的是摄像头和显示屏的引脚分配。从OV7725摄像头抓图到HDMI实时显示,FPGA和ARM两个核心分工明确得就像火锅店前厅后厨的配合——一个管火候,一个管摆盘。这行代码里的魔法数字可不是随便凑的,77、150、29这三个系数是人眼对不同颜色敏感度的量化值,比简单取平均讲究多了。在此工程的基础上,可以适配到正点原子的其他开发板上,也可以继续在FPGA端加速卷积神经网络。在
RBF模糊神经网络用于自适应调整PID;包含三个独立的程序:传统PID、梯度下降学习网络参数、以及PSO离线优化网络与梯度下降在线调整网络参数。包含了详细的说明:传递函数的离散化处理方法、模糊神经网络的理论说明以及程序说明等四部分内容。请注意:不提供修改传递函数、输入的服务(这一部分的修改方法已经在说明当中注明了)嘿,大家好!今天来聊聊超有趣的 RBF 模糊神经网络用于自适应调整 PID 这个话题
信捷XD系列,六轴标准程序,包含轴回零,相对定位,绝对定位, 手自动切换 ,电机参数计算,整个程序的模块都有,程序框架符合广大编程人员思维,只要弄明白这个程序,一般的项目都不会无从下手,参照这个,做项目不再难,拿着就可用,思路清晰易懂。信捷XD系列,六轴标准程序,包含轴回零,相对定位,绝对定位, 手自动切换 ,电机参数计算,整个程序的模块都有,程序框架符合广大编程人员思维,只要弄明白这个程序,一般
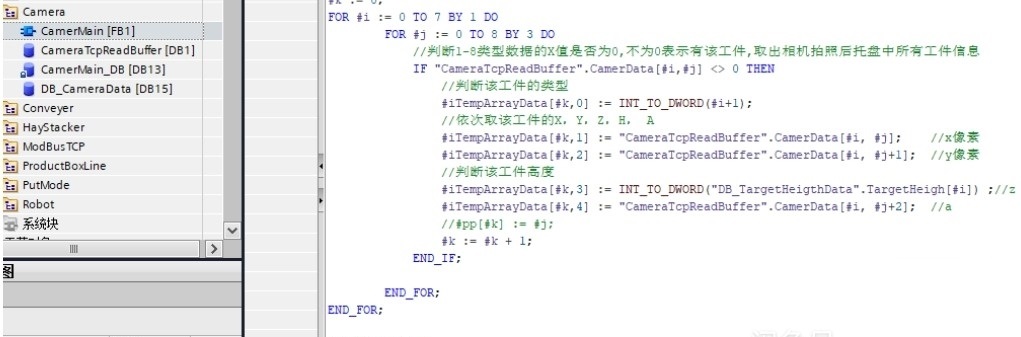
这套系统现在跑得贼溜,但联调阶段简直是地狱模式——视觉坐标系和机械臂坐标系得做旋转补偿,码垛机的托盘尺寸突然变更导致位置重算,还有最要命的通讯丢包问题。两台PLC1215配TP700触摸屏,带着基恩士视觉、ABB机械臂、四台G120变频器还有伺服轴蹦迪,这酸爽必须记录下。这种混编模式充分发挥各自优势——逻辑控制用梯形图直观,算法计算用SCL高效。注意工艺对象的状态位处理,Execute信号必须用到