




- @2509_94268408
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
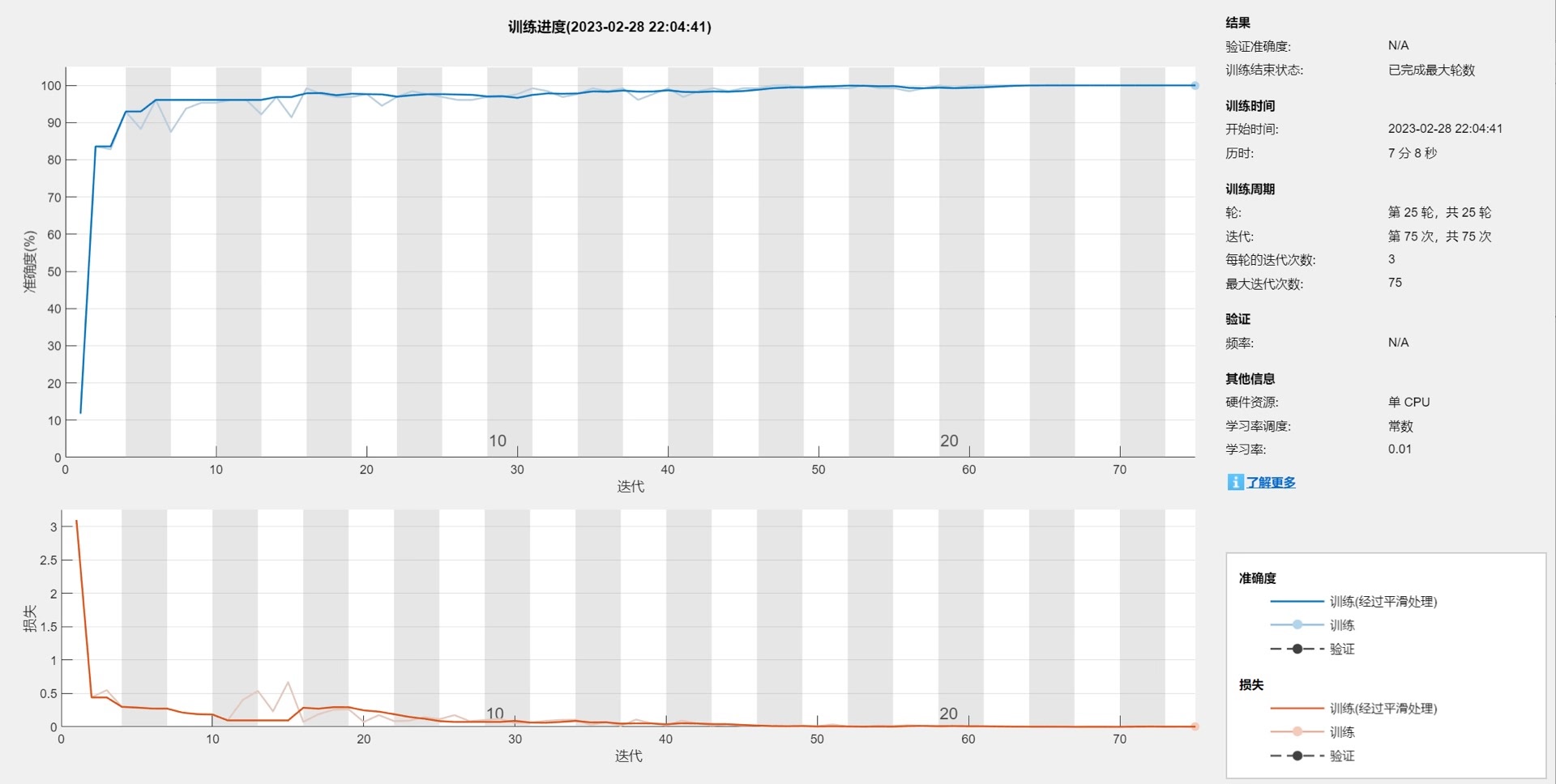
深度学习 5层CNN代码实现图片分类训练集共有9个文件夹代表9类,每类有50张图片,可根据需要自行准备训练集MATLAB代码,代码注释清楚,容易上手温馨提示:联系请考虑是否需要,(Example_7)在深度学习领域,卷积神经网络(CNN)是图片分类任务中极为常用且强大的模型。今天咱就用MATLAB来实现一个5层CNN做图片分类,数据集有9个类别,每个类别50张图片。
已经量产的产品,不是玩具。Nordic公司nRF51822芯片开发,芯片集成BLE蓝牙4.0协议。使用LIS3DH作为加速度传感器,进行运动和睡眠监测。手环的PCBA部分,主要包括一颗集成BLE功能的MCU,以及由MCU控制的各种外设:蓝牙射频电路;使用SPI接口的G-sensor;使用I2c接口的线性马达驱动电路;使用I2c接口的LED点阵驱动,与线性马达公用总线;使用GPIO的按键输入;使用G

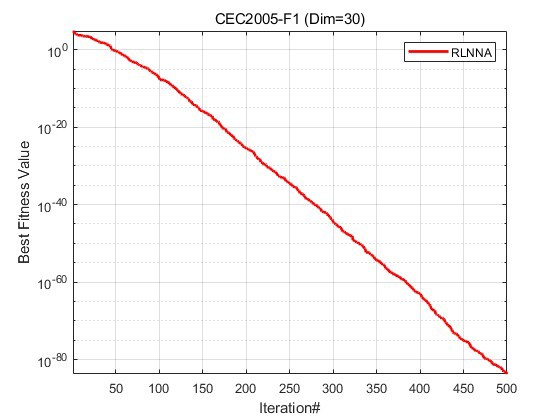
基于强化学习的神经网络优化算法(RLNNA)优化机器人路径规划基于强化学习的神经网络优化算法(RLNNA)是一种利用强化学习来优化神经网络的算法。它通过强化学习来训练神经网络,使其能够更好地适应不同的任务和环境。在RLNNA中,神经网络被视为一个智能体,它通过与环境进行交互来学习如何完成任务。这个智能体会有一个奖励机制,即根据完成任务的情况给予相应的奖励或惩罚。通过不断与环境交互,智能体逐渐学习到
西门子1200与ABB机器人TCP 通信案例程序,博途V16和昆仑通泰触摸屏程序PLC最近在项目中捣鼓了西门子1200与ABB机器人的TCP通信,顺便搭配了博途V16和昆仑通泰触摸屏程序,今天来给大家分享分享。
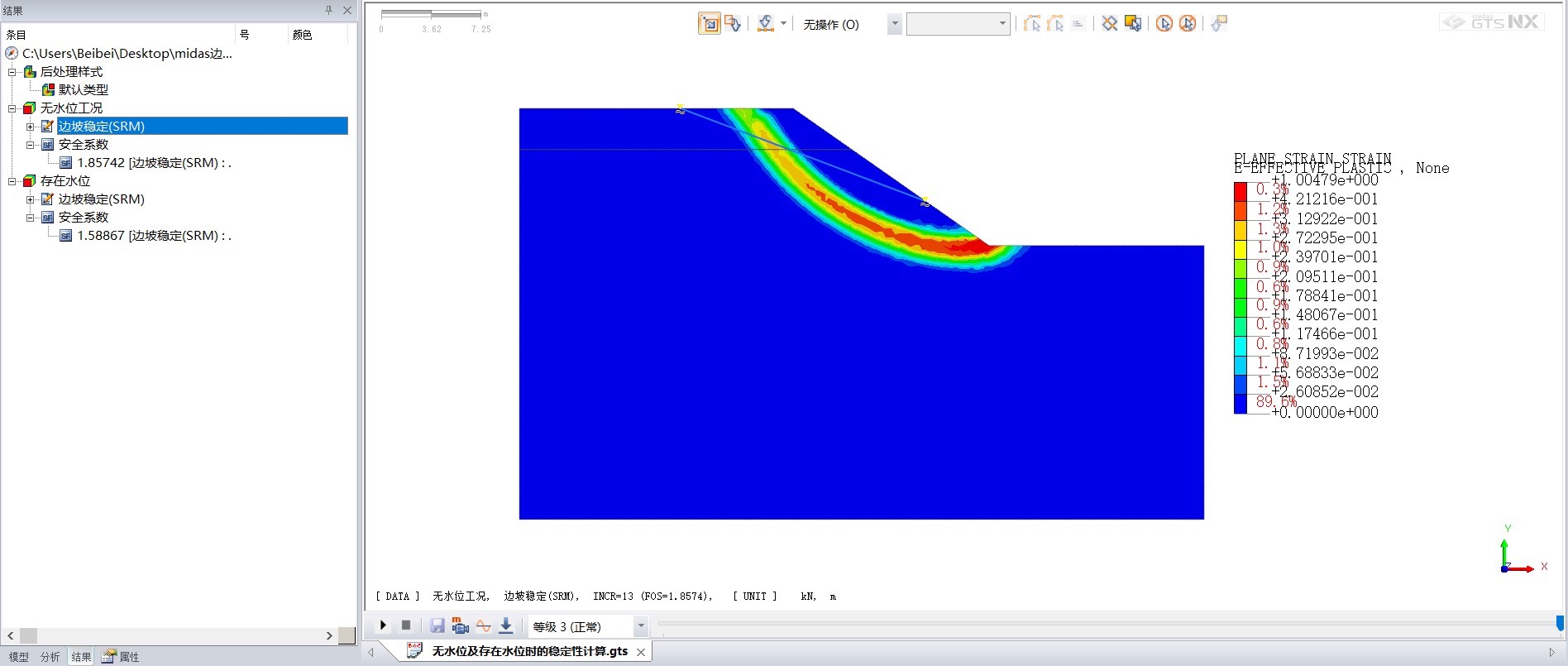
今天刚好有个土质边坡的对比案例,无水状态下安全系数1.86,水位线一加上去直接掉到1.59,这水压的杀伤力比想象中还猛啊。有意思的是水位线以下的土体虽然饱和度更高,但破坏区反而比水位线交接处小,这说明浸润面的位置变化才是稳定性突变的关键因素。本案例对一土质边坡在有水条件和无水条件下分别进行了边坡的安全系数的计算,计算条件为平面应变,水位面设定在图示中的红色线条处,无水时边坡的安全系数为1.86,有
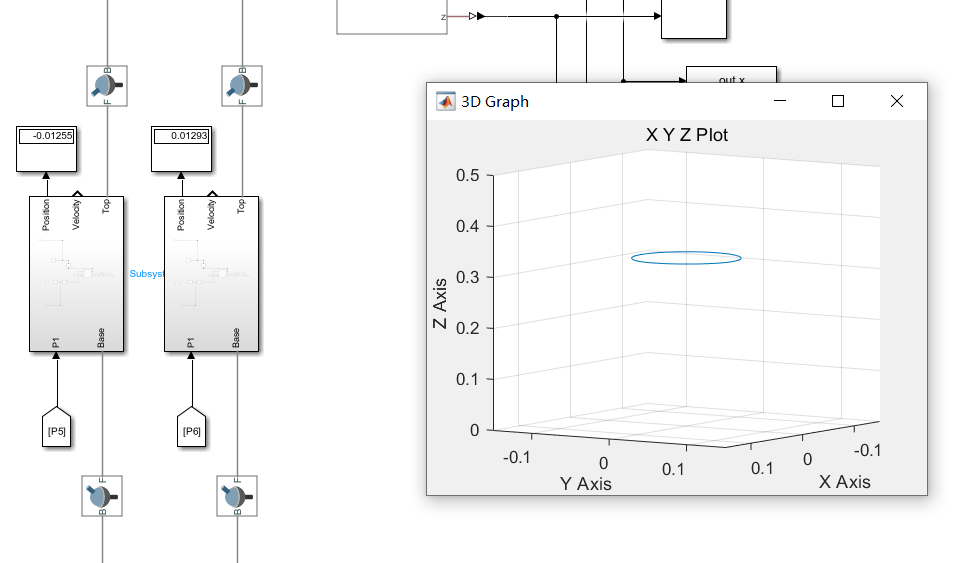
MATLAB并联机器人Stewart并联平台仿真s运动学逆解并联机器人运动学、动力学、算法、三维仿真Matlab Simulink simscape仿真自制。MATLAB并联机器人Stewart并联平台仿真s运动学逆解并联机器人运动学、动力学、算法、三维仿真Matlab Simulink simscape仿真自制。这动力学闭环能跑出0.5ms的步长,配合Simscape的物理引擎做联合仿真,效果比
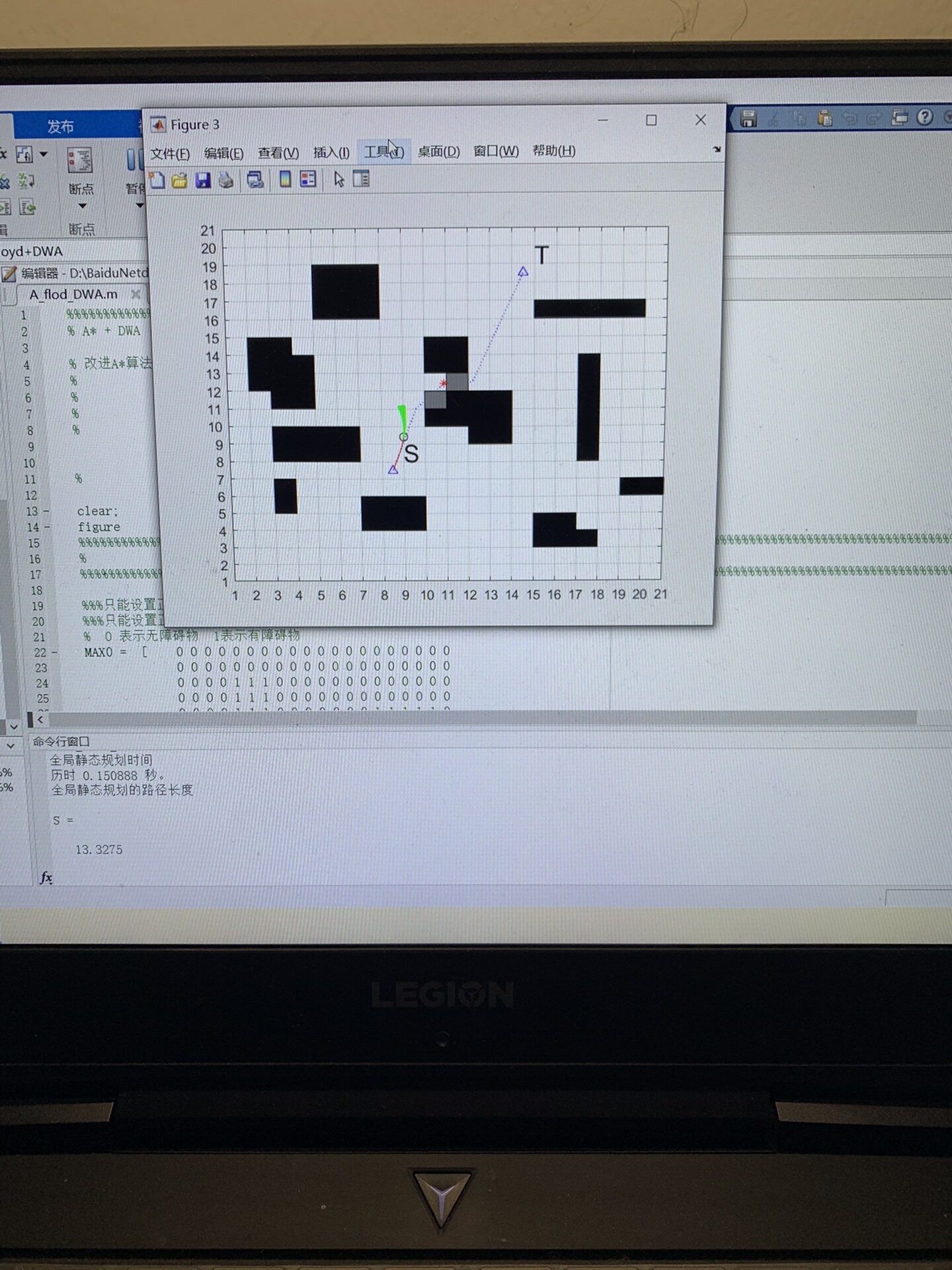
这个预测补偿解决了控制延迟导致的路径摆动,比单纯提高控制频率省了30%的CPU占用。注意预测时间要根据实际电机响应调整,别整过火了。这里给路径对齐加了时间衰减权重,实测在走廊场景下跟丢概率从23%降到7%。注意指数函数处理障碍距离,比线性变化更能避开死亡华尔兹。当雷达检测到临时障碍时更新risk_map,这样A星生成的路径会自动避开拥堵区。某次实测中,动态调整让重规划次数减少了62%。这个骚操作通
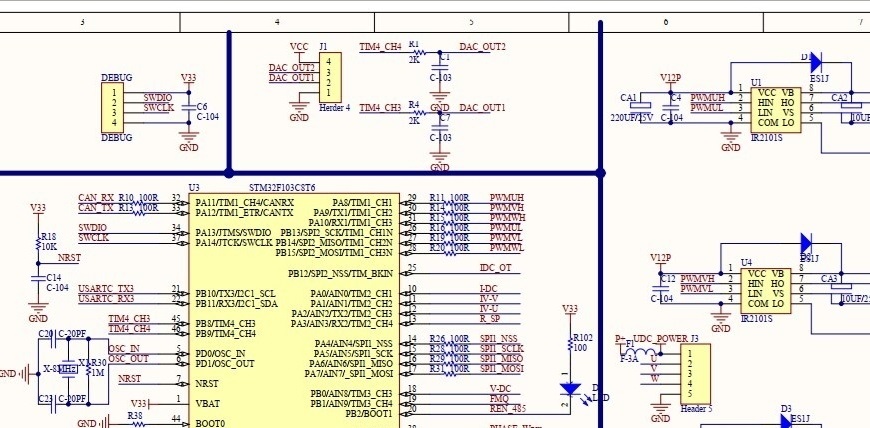
先看硬件架构,核心是用三路PWM配合六步换相。最后给想复现的兄弟提个醒:无感方案对PCB布局敏感,采样电阻到MCU的走线要尽量短。代码仓库里有个motor_debug.c文件,里面集成了在线观测功能,可以通过串口实时调整PID参数,这玩意儿调参时能救命。最近在捣鼓一个全开源的电机驱动项目,用STM32F1实现了有感和无感的BLDC/PMSM驱动。这玩意儿挺有意思,尤其是无感方案在资源紧张的F1上跑
本项目基于TCN-Transformer融合架构,实现了一套完整的时序预测解决方案,具备高精度、易扩展、工程化的特点。技术层面:融合TCN与Transformer的优势,解决“局部特征+全局依赖”的双重建模问题。工程层面:模块化设计、超参数集中管理、完善的评估体系,便于快速适配不同时序预测场景。

已经量产的产品,不是玩具。Nordic公司nRF51822芯片开发,芯片集成BLE蓝牙4.0协议。使用LIS3DH作为加速度传感器,进行运动和睡眠监测。手环的PCBA部分,主要包括一颗集成BLE功能的MCU,以及由MCU控制的各种外设:蓝牙射频电路;使用SPI接口的G-sensor;使用I2c接口的线性马达驱动电路;使用I2c接口的LED点阵驱动,与线性马达公用总线;使用GPIO的按键输入;使用G