




- @OoxJqfQCaS
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
无叶风扇的驱动方案里藏着不少有意思的技术细节,咱们今天就扒一扒基于HC32F030主控的无感FOC驱动实现。先说说这主控芯片,HC32F030的PWM模块支持中心对齐模式,这对三相电机的对称控制特别友好。实际调试中发现,如果采样点没卡准PWM的波谷位置,电流波形会有明显毛刺,这个坑可是让不少新手栽过跟头。无叶风扇驱动器方案,主控芯片hc32f030,无感foc驱动,电流环,速度环控制,顺逆风启动控
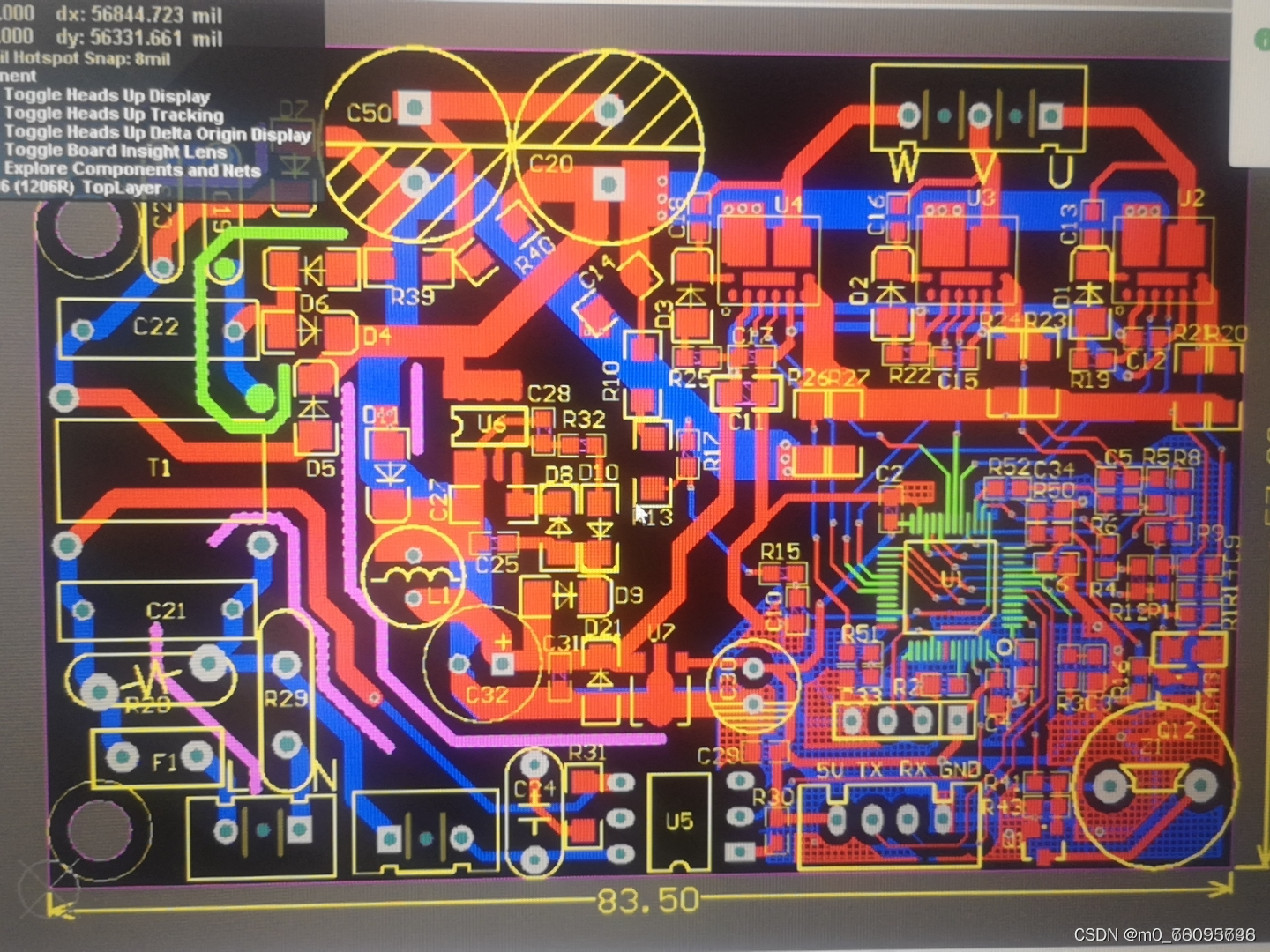
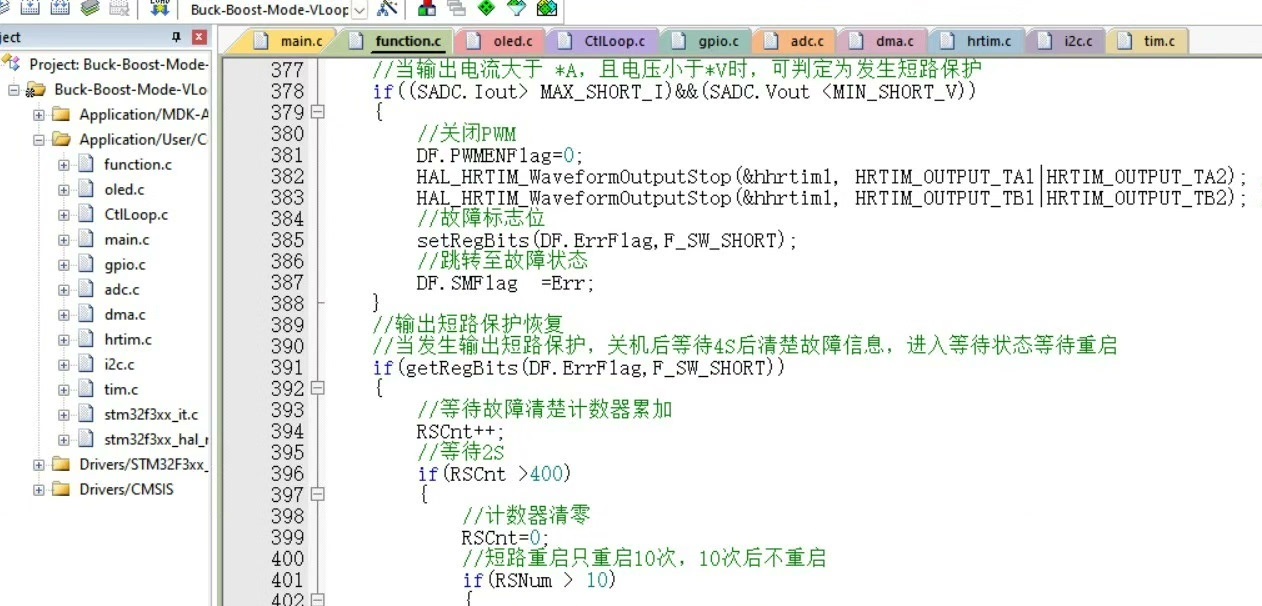
(2)程序源码:三套程序(Buck模式、Boost模式、Buck-Boost模式),具有软起动、完整的短路保护,过流保护,输出过压保护,输入过压欠压等保护功能。(2)程序源码:三套程序(Buck模式、Boost模式、Buck-Boost模式),具有软起动、完整的短路保护,过流保护,输出过压保护,输入过压欠压等保护功能。模式切换逻辑是项目的灵魂。功能:采用STM32F334C8T6芯片,能够根据输入
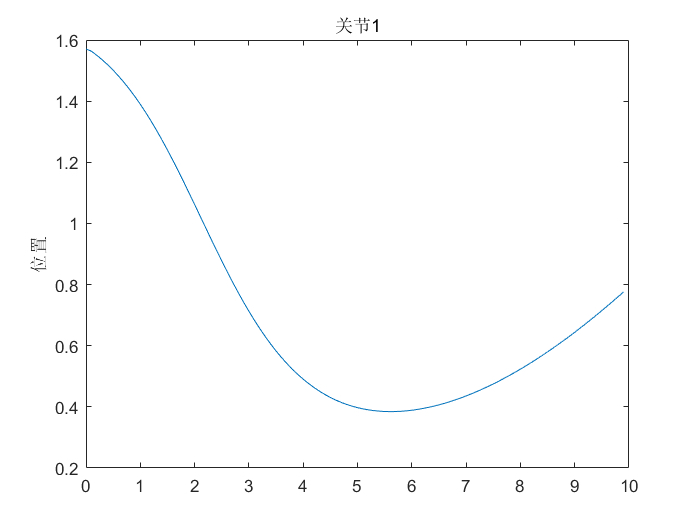
六轴机器人轨迹规划是一个复杂而有趣的问题,它涉及到运动学、动力学、控制理论等多个领域的知识。通过合理选择规划空间(关节空间或笛卡尔空间)、使用合适的方法(如Slerp)进行姿态插补,以及结合实际应用中的工具(如ROS和MoveIt!),我们可以实现一个高效且可靠的轨迹规划系统。希望这篇文章对你理解六轴机器人轨迹规划有所帮助!
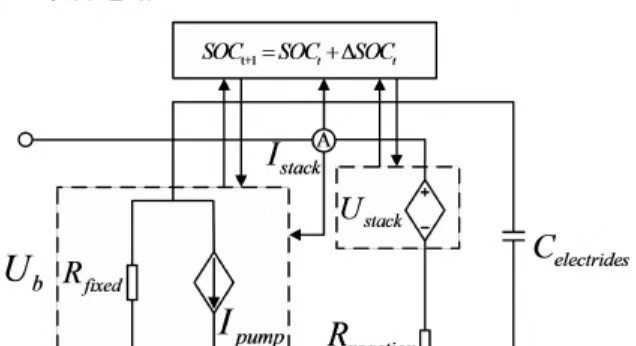
总的来说,这个仿真模型非常强大,通过双闭环控制,我们可以精确地控制电池的充放电电流和电压。接下来,我们来看看电流环控制。双向DC/DC全钒液流蓄电池充放电储能matlab/simulink仿真模型,采用双闭环控制,充放电电流和电压均可控,直流母线端电压可控,电流为负则充电,电流为正则放电,可以控制电流实现充放电。双向DC/DC全钒液流蓄电池充放电储能matlab/simulink仿真模型,采用双闭
正好手头有个开箱即用的Matlab方案,实测只需替换Excel表格就能直接跑出预测曲线和八种评估指标,特别适合刚接触神经网络的小白。有个新手容易踩的坑:如果不小心把输出变量混在输入里做归一化,会导致数据泄露,这点在代码里通过列索引控制得很严谨。LSTM多输出回归,基于长短期记忆神经网络(LSTM)的多输出回归预测(多输入多输出)2、评价指标包括:R2、MAE、MBE、RMSE等,图很多,符合您的需
交通灯维纶通触摸屏和西门子S7-1200联机博途V14,EBproV507.02版本,带注释和IO表,最近在项目中捣鼓交通灯的控制,用到了维纶通触摸屏与西门子 S7 - 1200 进行联机,软件版本分别是博途 V14 和 EBproV507.02。今天就来给大家分享一下具体的实现过程,还会带上详细的注释和 IO 表哦。

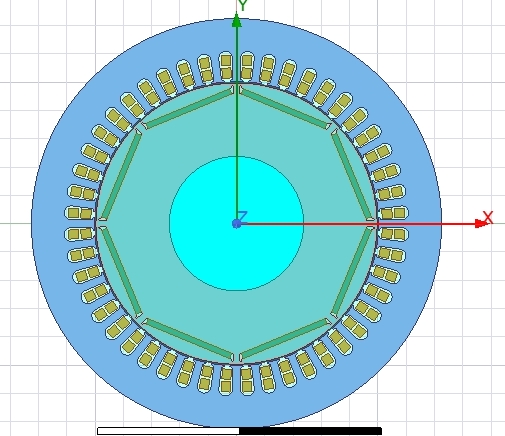
本系统基于非支配排序遗传算法(NSGA-II)构建,实现了与Maxwell电磁仿真软件的实时数据交互,针对电机结构参数进行多目标优化设计。系统通过自动化的参数迭代、仿真分析与结果反馈,在保证优化精度的前提下,显著提升了电机结构设计的效率,适用于需要平衡多性能指标的电磁设备优化场景。核心目标是通过算法驱动的参数寻优,实现电机平均转矩、转矩脉动与齿槽转矩三大关键性能指标的最优平衡。f1:平均转矩的倒数
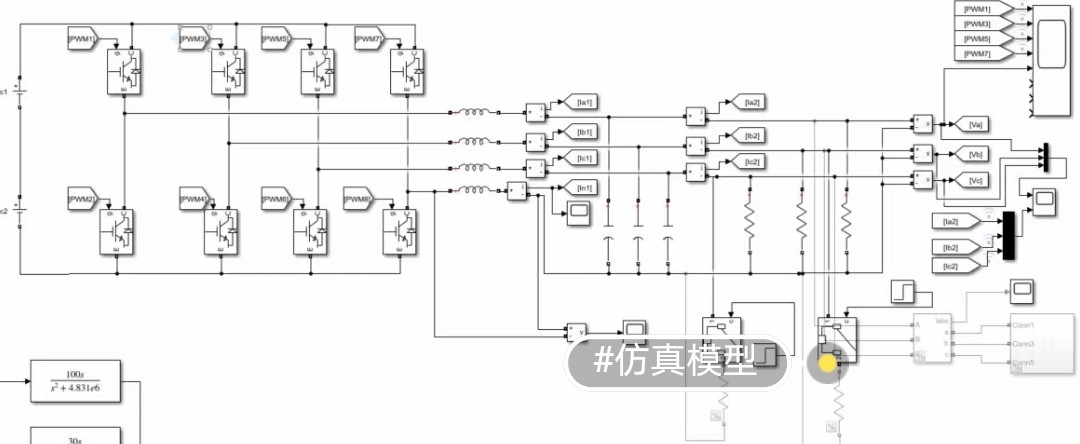
参考文献直接祭出电力电子领域三大神书:Rashid的《Power Electronics》讲拓扑基础,Blaabjerg的论文《Overview of Control Methods》提供控制思路,最后用Simulink官方文档《Power Systems Modeling》里的案例做实现验证。需要源码的老铁记得把模型里的注释开关打到详细模式,藏着参数整定秘籍。设计报告里详细记录了20组不同负载组
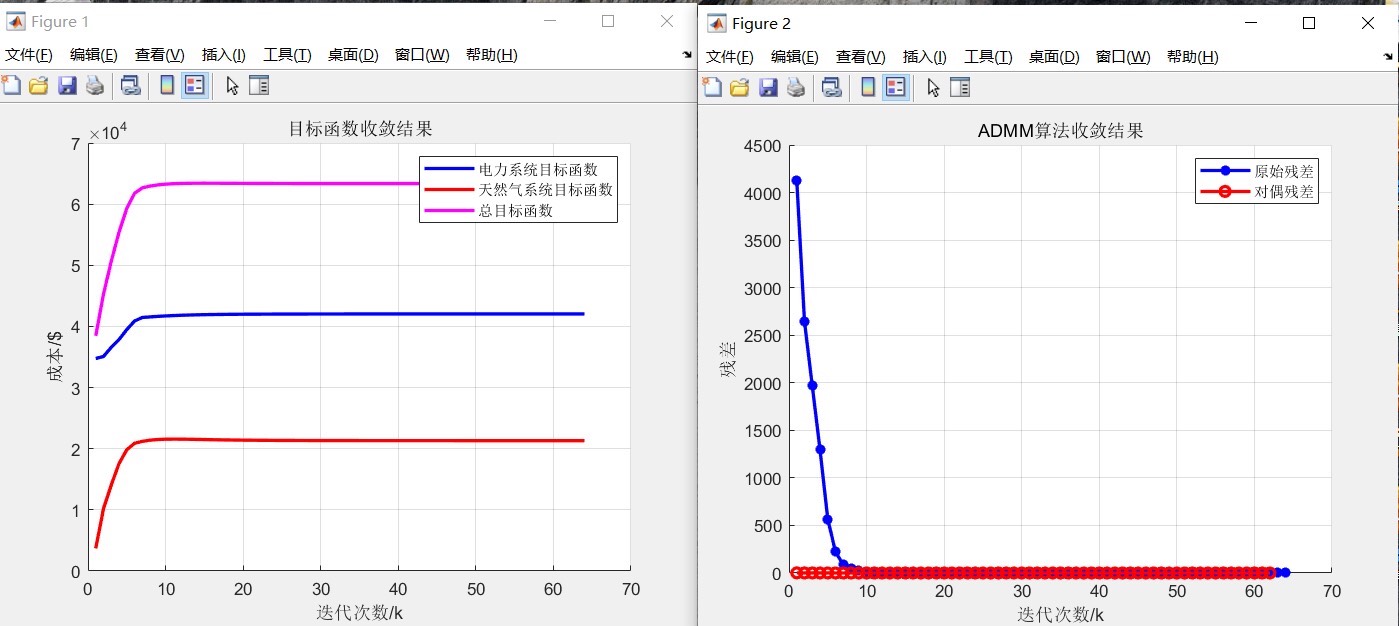
别被这个高大上的名字吓到,说人话就是用有限的历史风电数据,整出个能扛住各种意外情况的调度方案。研究内容:为了应对风电不确定性给电气综合能源系统带来的运行风险,采用分布鲁棒机会约束,通过数据驱动的方式,以少量的风电预测误差历史数据得到与矩信息有关的模糊集,并将形成的机会约束问题转化为易于求解的形式。研究内容:为了应对风电不确定性给电气综合能源系统带来的运行风险,采用分布鲁棒机会约束,通过数据驱动的方
最近在调试有源电力滤波器(APF)的时候,发现传统PI控制在应对周期性谐波时总有点力不从心。两者的配合就像炒菜时的火候控制——PI是文火慢炖保证基础味道,重复控制则是猛火爆炒锁住鲜香。调试时记得先断开重复控制环单独整定PI参数,等电流跟踪基本靠谱了再接入重复控制部分,这样系统才不会"炸毛"。在APF的电流跟踪环节,PI主要对付的是稳态误差,但遇到6k±1次这种规律性谐波,积分环节的反应速度就跟不上
