- @2401_88718801
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
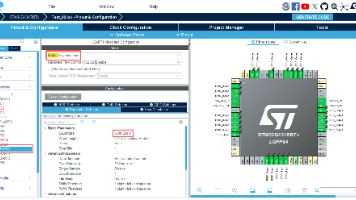
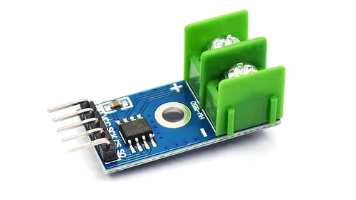
本文介绍了基于STM32F103C8T6和HAL库驱动MAX6675热电偶温度模块的实现方法。通过STM32CubeMX配置SPI1接口和片选引脚(PB1),详细说明了硬件接线方式。核心代码实现了SPI通信、原始数据读取和温度转换功能,包括温度值计算和热电偶连接状态检测。驱动以结构体形式封装模块参数,提供了温度读取任务示例。该方案解决了HAL库下MAX6675驱动资料稀缺的问题,为开发者提供了可直
要点内容I/O设备模型三层架构:管理层 → 框架层 → 驱动层设备操作流程PIN设备writereadattach_irqUART设备支持轮询/中断/DMA三种模式Ringbuffer串口数据缓存利器,注意线程安全自动初始化简化启动流程掌握了设备驱动框架,你就能自如地操控各种硬件外设。

RT-Thread通过时钟节拍和定时器实现精确的时间管理。时钟节拍是系统最小时间单位,由硬件定时器中断驱动。定时器分为硬件/软件两种,支持单次或周期触发模式,回调可在中断或线程上下文执行。文章详细介绍了定时器创建、启动、停止和控制API,并提供了周期/单次定时器示例代码。此外还介绍了利用SysTick实现高精度延时的方法。时钟与定时器管理是RTOS任务调度的基础,掌握这些机制能精确控制任务执行时机

RT-Thread通过时钟节拍和定时器实现精确的时间管理。时钟节拍是系统最小时间单位,由硬件定时器中断驱动。定时器分为硬件/软件两种,支持单次或周期触发模式,回调可在中断或线程上下文执行。文章详细介绍了定时器创建、启动、停止和控制API,并提供了周期/单次定时器示例代码。此外还介绍了利用SysTick实现高精度延时的方法。时钟与定时器管理是RTOS任务调度的基础,掌握这些机制能精确控制任务执行时机
要点内容线程组成控制块 + 栈 + 入口函数状态模型初始 → 就绪 → 运行 ↔ 挂起 → 关闭调度策略优先级抢占 + 同级时间片轮转创建方式延时选择RTOS中必须使用,禁止忙等待delay掌握了线程管理,你就掌握了RTOS的核心。下一篇将介绍时钟与定时器管理,探索RT-Thread如何处理时间维度的任务调度。

本文对比了嵌入式开发中裸机与RTOS的差异,重点介绍了国产RTOS RT-Thread。裸机开发适合简单任务,而RTOS在多任务调度、资源管理等方面更具优势。RT-Thread作为轻量级开源系统,具有模块化设计、丰富组件和实时调度等特点,相比FreeRTOS在功能集成和开发工具上更完善。文章还概述了RT-Thread内核的核心功能和启动流程,为开发者从裸机转向RTOS提供了实用指南。

本讲介绍了STM32开发中的关键模块与技术:1) UART模块配置及弱定义回调机制;2) DMA工作原理及其传输模式;3) 环形缓冲区的实现与应用;4) ADC模块配置及DMA数据采集方法;5) 队列数据结构思想;6) 格式化字符串处理函数sprintf/sscanf。重点阐述了通过DMA实现外设与内存间高效数据传输的技术方案,以及中断处理与缓冲机制在实时系统中的重要作用。这些内容为嵌入式系统开发