




- @Dustinthewine
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
安装Android相关插件、添加JDK、SDK、NDK路径、搭建环境过程常见问题:1.“Platfrom tools installed”失败2. 以上操作全部完成且无报错现象,Android编译就是报错3. “SDK manger is not available with the current version of SDK tools. Use native SDK manager”报错(
🔥 嵌入式串口通信高阶实战(3/3)— 协议解析(查表法)📌本课讲解串口协议解析的查表法(表驱动法),通过结构体数组映射字段与处理函数,实现高效解析。
🔥 嵌入式串口通信高阶实战(1/3)— DMA+串口空闲中断+环形队列📌 解决传统方案的三大痛点:轮询方式CPU占用率100%问题字节中断导致的系统实时性崩塌DMA直接接收的数据覆盖风险💡 核心技术组合:串口空闲中断精准帧检测DMA双缓冲半/全传输中断机制环形队列实现生产-消费模型
🔥 嵌入式串口通信高阶实战(2/3)— 协议设计📌带你掌握工业级协议开发精髓!从简化版帧结构入门,学习帧头、命令ID、数据长度等核心字段设计,到专业版的多设备寻址、CRC校验、序列号管理等高级特性。
本课详解ADC两种高效采集方案:规则组+DMA双缓冲+定时器触发:通过双缓冲机制实现高速连续采样,避免数据竞争,适合温度、电压等常规信号采集;注入组+PWM触发:利用硬件事件触发中断,精准控制采样点避开开关噪声,适用于电机相电流、过流保护等实时性要求高的场景。对比分析轮询、中断等传统方案的弊端,提供代码抽象与设计逻辑,助力嵌入式开发中的ADC优化应用。
FLASH闪存是属于内存器件的一种,“Flash”。闪存则是一种非易失性( Non-Volatile )内存,在没有电流供应的条件下也能够长久地保持数据,其存储特性相当于硬盘,这项特性正是闪存得以成为各类便携型数字设备的存储介质的基础。各类 DDR 、 SDRAM 或者 RDRAM 都属于挥发性内存,只要停止电流供应内存中的数据便无法保持,因此每次电脑开机都需要把数据重新载入内存。NAND 闪存的

该篇为基于stm32+esp8266通过mqtt协议连接onenet物联网云平台,单片机部分将采集到的数据(温湿度、光照强度、压强等等)上传至云平台服务器,云平台可下发指令操控单片机,实现远程通信。

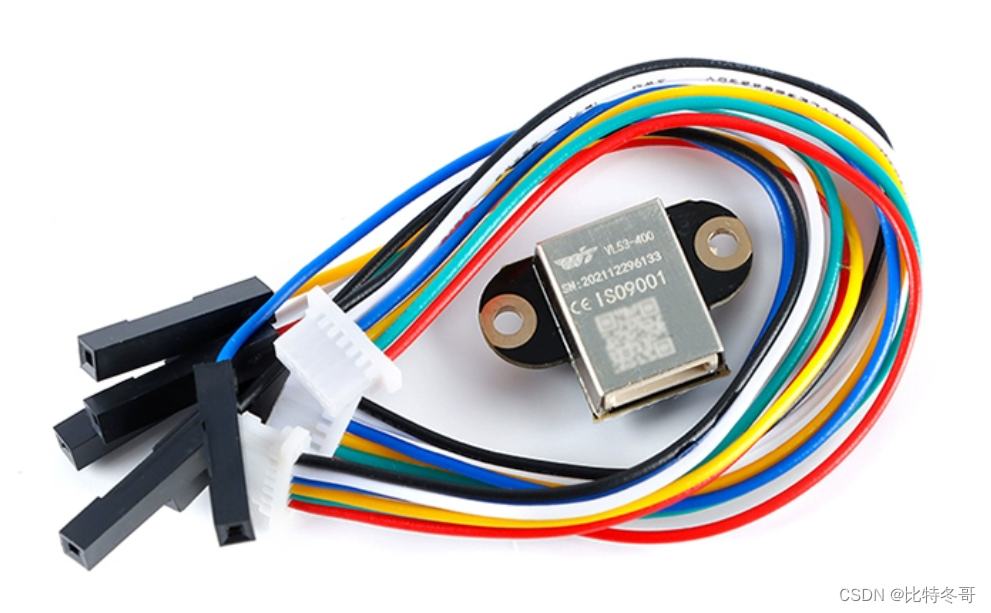
先由激光二极管对准目标发射激光脉冲。经目标反射后激光向各方向散射。部分散射光返回到传感器接收器,被光学系统接收后成像到雪崩光电二极管上。雪崩光电二极管是一种内部具有放大功能的光学传感器,因此它能检测极其微弱的光信号。记录并处理从光脉冲发出到返回被接收所经历的时间,即可测定目标距离。该模块部分商家已取消IIC协议,串口默认配置为115200、8数据位、1停止位、无校验位。时会出现激光穿透现象,即回收
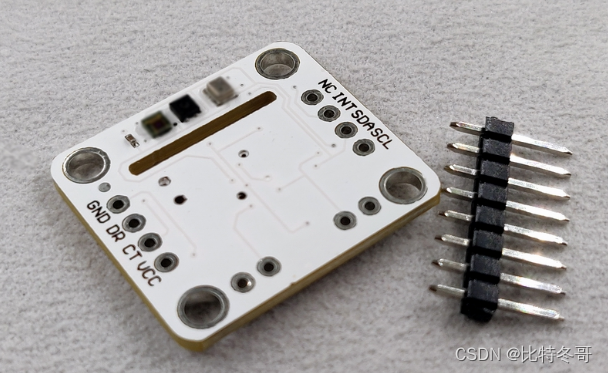
GY-39是一款低成本,气压,温湿度,光强度 传感器模块。工作电压 3-5v,功耗小,安装方便。其工作原理是,MCU 收集各种传感器数据,统一处理,直接输出计算后的结果,此模块,有两种方式读取数据,即串口 UART(TTL 电平)或者 IIC(2 线)。串口的波特率有 9600bps 与 115200bps,可配置,有连续,询问输出两种方式,可掉电保存设置。可适应不同的工作环境,与单片机及电脑连接
本篇源于 “2022 湖南省大学生物联网应用创新设计竞赛技能赛参考样题”——应用物联网的共享电动自行车针对共享电动自行车应用场景,设计实现共享电动自行车、用户、管理等相关人、物互联的物联网系统。1)每台电动自行车有一个唯一的 ID 号,以及由 GPS 采集的位置信息(比赛中,GPS 及地图信息可用人工输入固定位置编号代替);2)电动自行车电池可换,每个电池上有唯一 RFID 信息,可被电动自行车读