登录社区云,与社区用户共同成长
邀请您加入社区
本文聚焦机器人驱动开发中的中断处理技术,系统阐述其原理与实现。中断作为硬件事件通知机制,能显著提升系统实时性和响应效率。文章从驱动基础框架切入,详细讲解中断处理流程、注册方法(request_irq)及与DMA/ioctl的协作模式,强调中断上下文不可阻塞等关键约束。通过机器人传感器驱动实例演示完整实现,包括模块初始化、中断处理函数编写和资源释放。针对开发痛点,提供中断风暴应对、共享中断管理等解决
摘要:本文分享了解决Multisim元件库丢失问题的几种方法。包括删除配置文件(需关闭软件并清空特定路径下的文件夹后重启)、完全卸载重装软件(需注意卸载步骤)、卸载Windows相关更新(可通过命令行操作)、修改文件权限(运行特定命令)以及;薛定谔式的多次尝试启动法。其中重装法和删除配置法相对可靠,但效果因人而异。文章最后附上了成功截图,并欢迎读者讨论更优解决方案。
/最高频率50MHz。//定义GPIOA_15脚。//===MAX31865初始化===////===中位值滤波===////===通道转换===////===写数据===////===读数据===//
基于QCA7000芯片的SPIUART驱动开发
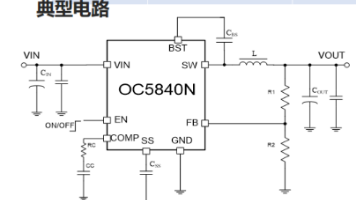
OC5840N 40V3A同步高效降压DCDC芯片
RN8302B电表芯片驱动开发指南(基于SPI通信)
TM1668是一种带键盘扫描接口的LED(发光二极管显示器)驱动控制专用电路,内部集成有MCU数字接口、数据锁存器、LED 高压驱动、键盘扫描等电路。主要应用于VCR、VCD、DVD 及家庭影院等产品的显示屏驱动。
微电半导体WD5040(电流模式单片降压开关稳压器):应用于分布式电力系统、汽车系统、高压电力转换工业电力系统、电池供电系统等等……该芯片在4.5V-40V输入范围内工作,通过两个集成的N沟道MOSFET提供1.5A的连续输出电流。内部同步电源开关无需使用外部肖特基二极管即可提供高效率。在轻负载下,稳压器以低频运行以保持高效率和低输出纹波。电流模式控制提供严格的负载瞬态响应和逐周期电流限制。芯片特
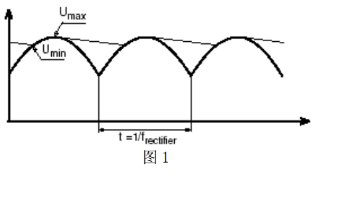
在大量的生产实践与理论探讨中,当开关电源中电容发生损坏,特别是电解电容冒顶,电解液外 溢时,电源厂家怀疑电容质量有问题,而电容厂家说电源设计不当,双方争执不下。电解电容的行业规定,在额定温度 T0下,加上允许额定纹波电流 I 产生的最大发热△t≤5 deg℃ 因此实际纹波电流为 Ir 时,电容器自身的发热是∆T=∆t deg ℃ △t 为额定温度下加上额定纹波电流时电容器允许最大温升(deg℃),
MPPT方案QW3880太阳能光伏板高利用率芯片方案
drv2667 触摸电机
总的来说,AP8105是一款适用于干电池手持设备的理想驱动IC,它能够提供高效的电源管理,通过降低功耗延长电池寿命,并适用于各种便携式设备。此外,AP8105具有易于使用的引脚配置,使其适用于各种干电池手持设备。
这是全文最核心的部分,也是大多数同类文章没有深入展开的地方。import ("net/http"// Client 是封装后对外暴露的接口,便于 mocko(cfg)},sdk: sdk,cfg: cfg,}, nilconst (ErrNetwork // 超时、连接拒绝Status int。
户外拉杆音箱方案,内置FP5207非同步升压控制IC,具备响应迅速、好用便携、音响声亮等特点,满足不同功率需求。FP5207是台湾远翔设计生产的全新一代非同步升压控制IC,在拉杆音箱的运用中具有以下优势深圳市雅欣控制技术有限公司,在芯片行业深耕二十载。是Feeling和MST在深圳的一级代理商。致力于推广销售电源管理芯片、LED驱动芯片和霍尔开关系列产品,为您提供最优化的解决方案、最优质的产品及咨
本文详细介绍了RK3568芯片的多媒体子系统架构设计。主要内容包括:1)视频处理单元(VPU)的硬件架构、V4L2驱动框架实现及缓冲区管理;2)图像信号处理器(ISP)的流水线设计、V4L2子设备集成和3A算法实现;3)显示子系统的VOP硬件架构和DRM/KMS驱动实现。该设计通过专用硬件加速与Linux标准框架的深度集成,实现了高性能多媒体处理能力,同时提供统一的开发接口。系统采用异构计算协同和
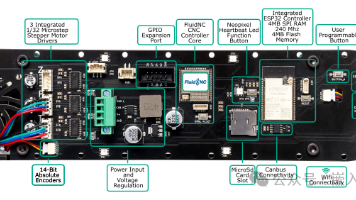
GitHub用户evezor带来的 Tobor v00正式开源!这是一款专为自动化工作流、CNC 设计和快速原型设计打造的模块化桌面机器人系统,硬件自由扩展 + 软件灵活编程,技术极客的梦想实验场!
在多串锂电池系统领域,无人机、电动工具、拉杆音箱等高附加值设备面临充电效率低、管理复杂和户外电源适配性差等挑战。为解决这些问题,本文提出了一种基于PD协议芯片ECP5701、充电管理芯片和升压芯片FP5207的三维协同方案。ECP5701作为协议枢纽,智能匹配快充协议,确保设备兼容性;充电管理芯片实时监控电池组状态,优化充放电策略;FP5207则通过升压技术满足大功率需求。该方案通过全链路整合,实
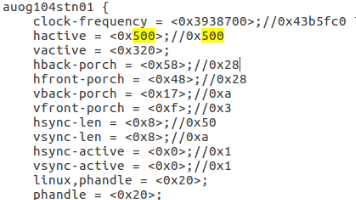
本文详细解析了LCD显示设备的时序参数设置与刷新率计算原理。主要参数包括60MHz像素时钟、1280×800有效显示区域、水平和垂直消隐区间以及同步信号配置。通过水平总时间(1448像素周期)和垂直总时间(846行)的计算,得出实际刷新率约为48.98Hz。文章还探讨了不同时钟频率(60-73MHz)对刷新率的影响,并给出了工程应用中参数优化、信号完整性和系统兼容性的注意事项。这些时序参数直接影响
以 Orin-x 为例,其中的 CPU 包括基于的主CPU 复合体,它提供通用高速计算能力;以及基于的功能安全岛(FSI),它提供了隔离的片上计算资源, 减少了对外部 ASIL D 功能安全 CPU 处理的需求。GPU 则是,为 CUDA 语言提供高级并行处理计算能力,并支持多种工具, 如 TensorRT,一种深度学习推理优化器和运行时,可提供低延迟和高吞吐量。Ampere 还提供最先进的图形功
驱动开发
——驱动开发
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 DAMO开发者矩阵
DAMO开发者矩阵





 DeepSeek技术社区
DeepSeek技术社区