




- @pengjiadashaoye
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
调试 AP 模块时,无法正常开启 AP 功能的解决方法。
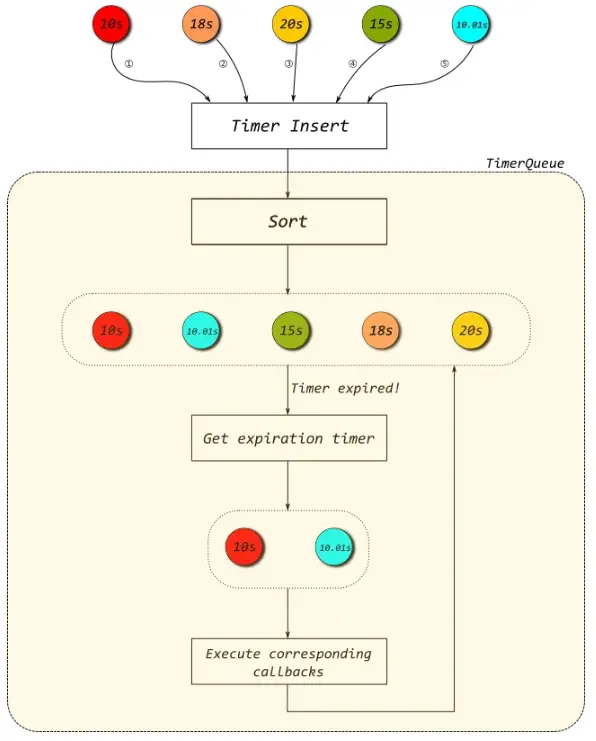
时钟管理器的应用包括典型的几个类,DeviceStatusService 是用来监听 timerFd 的,timerFd 是一个文件句柄,因此它包含了 epoll 的几步典型操作, 如 EpollCreate, AddEpoll,Wait EPOLLIN 和 EpollClose。当有时钟被触发时将在 wait EPOLL 中等到,然后执行始终回调函数 callback();DragManager
PWM(Pulse Width Modulation)即脉冲宽度调制,是一种对模拟信号电平进行数字编码并将其转换为脉冲的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。通常情况下,在使用马达控制、背光亮度调节时会用到PWM模块。PWM用于脉冲宽度调制,当驱动开发者需要将PWM设备适配到OpenHarmony时,需要进行PWM驱动适配。下文将介绍如何进行PWM驱动适配。

DAC(Digital to Analog Converter)是一种通过电流、电压或电荷的形式将数字信号转换为模拟信号的设备,主要用于:作为过程控制计算机系统的输出通道,与执行器相连,实现对生产过程的自动控制。在利用反馈技术的模数转换器设计中,作为重要的功能模块呈现。DAC接口定义了完成DAC传输的通用方法集合,包括:DAC设备管理:打开或关闭DAC设备。DAC设置目标值:设置DAC设备需要将数

到达这一步好比临门一脚,意义很大!您的代码被合入 OpenHarmony 平台,这是最后的一道关口,保证合入的是正确的,并且不会对系统造成意外。

Camera 驱动框架所在的仓为:drivers_peripheral,源码目录为:“drivers/peripheral/camera”。|-- hal| |-- BUILD.gn #Camera驱动框架构建入口| |-- adapter #平台适配层,适配平台| |-- camera.gni #定义组件所使用的全局变量| |-- test #测试代码|-- hal_c #为海思平台提供专用C接
终于等到下载代码的时刻了,业内不叫下载代码叫“拉代码”,上传代码叫“上库”,编译叫构建。

编译构建流程、编译脚本编写、目录规则、独立编译单个组件、独立编译芯片解决方案等介绍请见 编译构建子系统介绍。
介绍基于STM32F407IGT6芯片在拓维信息 Niobe407 开发板上移植OpenHarmony LiteOS-M轻量系统,提供交通、工业领域开发板解决方案。移植架构采用Board与SoC分离方案,使用arm gcc工具链Newlib C库,实现了lwip、littlefs、hdf等子系统及组件的适配,开发了配套应用示例代码,支持通过Kconfig图形化配置编译选项。

DAC(Digital to Analog Converter)是一种通过电流、电压或电荷的形式将数字信号转换为模拟信号的设备。DAC模块支持数模转换的开发。它主要用于:作为过程控制计算机系统的输出通道,与执行器相连,实现对生产过程的自动控制。在利用反馈技术的模数转换器设计中,作为重要的功能模块呈现。DAC模块主要在设备中数模转换、音频输出和电机控制等设备使用,设置将DAC模块传入的数字信号转换为
