
写文章




- @Youngmember
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
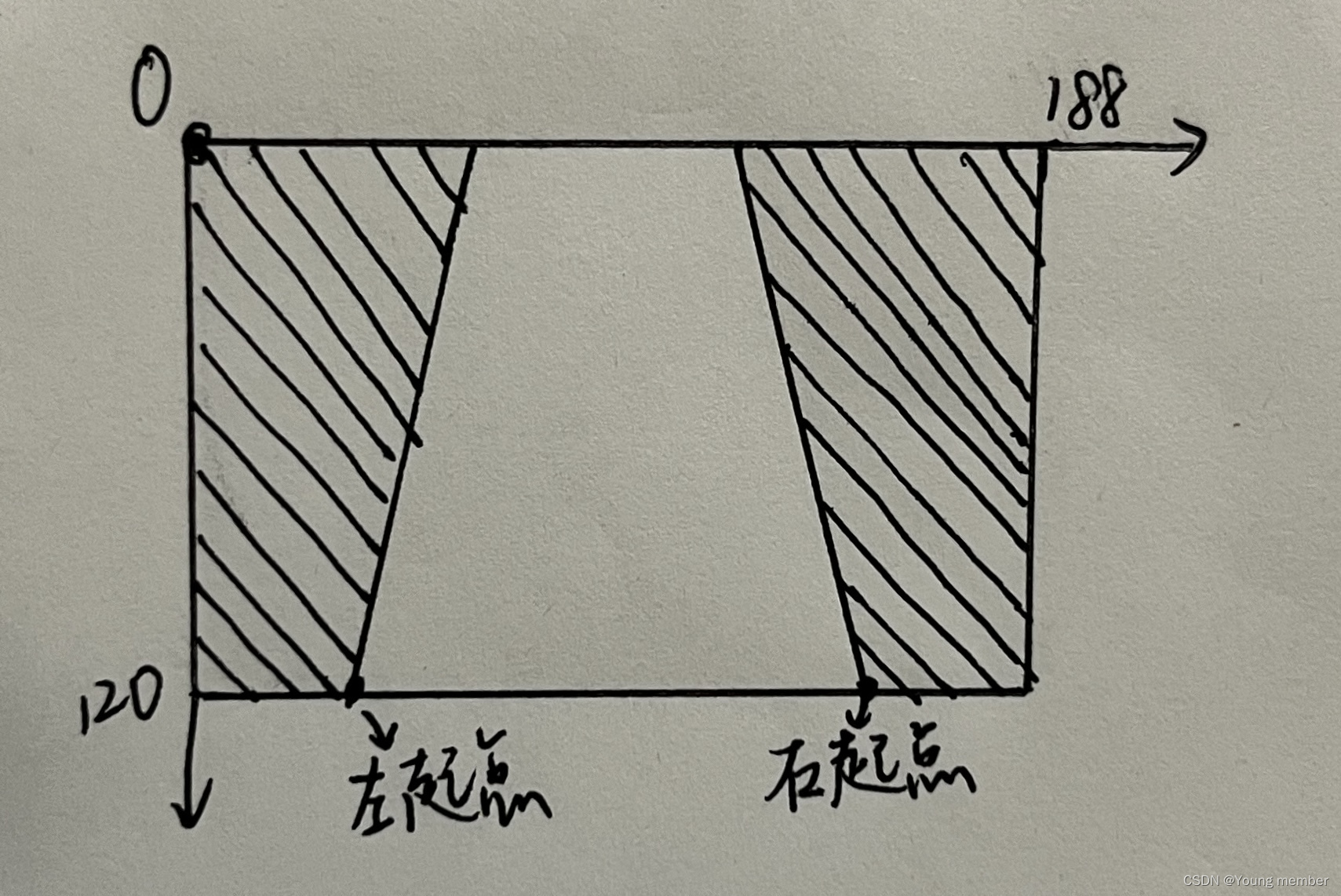
TC264芯片-摄像头循迹处理之八邻域法,逐行遍历判别法提取赛道边界
当你看完这个代码其实就明白了,其实它找边界的方法就是每一行遍历,然后判别是不是边界的方法也很简单,就是看当前这一行,比如左边界就是看当前点是黑色并且左边点是黑色,然后右边的两个点是白色。其中判别是否是赛道边界的起点的条件是,拿左起点举例,如果有一个点的左边是黑色,自己本身是黑色,它的右边两个点都是白色。然后再根据这个边界点进行边界的爬取。结语:提取赛道边界的方法有很多,我这边只介绍了最经典的八邻域
PID算法的应用思路(并级PID)
这个时候再加入Kd,使得小车震荡的幅度慢慢变小,当调到差不多平衡的时候就达到一个中等值,但是Kd同样也要调到中等偏大的状态,所以再继续加大一点Kd。具体方法是,先注释掉直立环,单独调整速度环,尝试Kp与Ki的正负,调到当轮子转动时,速度会一直加大,直到最大状态。但是小车的转向靠的是左右轮子的差速旋转来实现的,所以此时的PWM输出就不是简单的加到直立环和速度环后面。1、先调直立环的Kp与Kd的极性,

到底了