- @QQ2193276455
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文设计了一种基于STM32单片机的语音识别智能家居系统。系统采用STM32F103ZET6为核心控制器,集成LD3320语音识别模块、ESP8266 WiFi通信模块及各类传感器,实现语音控制灯光、窗帘、空调等家居设备。硬件设计包括电源、显示和执行模块;软件采用Keil MDK开发,包含语音识别、设备控制等子程序。测试表明,系统语音识别准确率达92%,响应时间≤1.5秒,运行稳定可靠。相比传统控
*单片机设计介绍,基于单片机智能变形搜救机器人电路系统设计。
*单片机设计介绍,基于单片机科学计算器系统仿真设计。
本文设计了一种基于STM32单片机的室内环境监测系统,整合温湿度、PM2.5、甲醛和光照传感器,实现多参数协同监测。系统采用OLED实时显示数据,通过声光报警和手机APP推送实现超标预警,并支持历史数据存储与趋势分析。测试表明,系统能准确检测环境变化,及时预警污染事件。未来可扩展AI预测和智能家居联动功能,实现从监测到调控的闭环管理。该系统成本低、集成度高,适用于家庭和办公场所的健康环境监测需求。
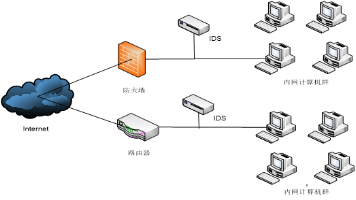
摘要: 本文研究了基于Linux系统的Snort入侵检测系统(SIDS)设计与实现。系统采用Libpcap获取网络数据包,Snort进行实时检测分析,MySQL存储日志,Apache提供Web服务,BASE作为可视化分析平台,Barnyard实现日志入库。文章详细阐述了入侵检测系统原理、Snort架构及特点,完成了需求分析、数据库设计、系统实现与测试。测试结果表明,该系统能有效检测ICMP等网络攻
摘要: 本研究设计了一款基于STM32F407IGH6单片机的智慧家庭多交互系统,整合语音识别、触摸控制、手机远程和环境自适应调节功能,实现灯光、窗帘、家电等设备的智能联动。系统采用分层架构设计,硬件集成传感器网络与执行模块,软件基于FreeRTOS实现多任务调度。测试表明,语音识别率达96%,响应时间≤1秒,设备控制准确率100%,待机功耗0.4W,成本仅为商用系统的40%。研究解决了传统系统交
本文设计了一种基于STM32和ZUC密码算法的嵌入式数据安全传输系统。针对物联网终端数据传输的安全风险,系统采用国产ZUC流密码算法实现轻量级加密,在STM32L431RCT6低功耗平台上完成数据采集、加密、传输和解密验证。通过硬件模块化设计和软件优化,系统实现了1ms内的快速加解密,LoRa/NB-IoT无线传输距离达2km,功耗低于80mA。测试表明系统能有效保障数据机密性、完整性和身份认证,
摘要: 本文设计了一种基于YOLOv8算法的智慧工地安全帽佩戴检测系统,采用"端-边-云"三级架构实现实时监测。系统通过高清摄像头采集工地画面,边缘服务器进行轻量化算法分析(模型仅8M),准确率达98.5%,响应时间≤200ms。具备违规实时报警、数据统计与云端管理功能,实测显示违规行为发生率从15%降至3%,替代80%人工巡检。系统适配复杂环境,部署成本低,可显著提升工地安全
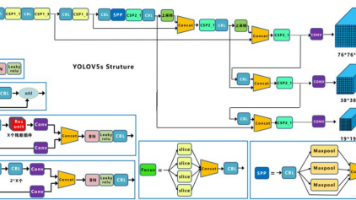
本文设计了一种基于计算机视觉的智慧工地安全帽佩戴检测系统,采用"端-边-云"架构和轻量化YOLOv8算法,实现98.5%的识别准确率和200ms内的实时检测。系统通过边缘计算处理视频流,支持多人同时检测,具备现场报警、违规推送和数据统计功能,有效替代人工巡检,使安全帽违规率从15%降至3%。测试表明系统在复杂环境下仍保持97%以上精度,部署成本仅为传统方案的60%,可显著提升工
本文设计并实现了一套基于OpenCV的自动批卷系统,主要针对标准化客观题(选择题、判断题)的自动批改。系统采用Python开发,利用OpenCV进行图像预处理、特征定位和填涂识别,通过透视变换校正图像,统计答题框内像素占比判断填涂情况,并与标准答案匹配计算得分。测试结果显示,系统准确率达98%,处理速度1.2秒/份,效率较人工提升90%以上。虽然存在填涂质量差异和图像采集偏差导致的误差,但系统具有