




- @2506_90492529
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
《MolmoAct2:开源机器人基础模型的重大突破》 研究人员发布了MolmoAct2机器人基础模型及其配套数据集,标志着自主机器人技术的重大进展。该模型在行业基准测试中表现优于现有专有系统,运行速度比前代快37倍,并首次内置了双臂协同操作能力。配套发布的MolmoAct2-BimanualYAM数据集包含720小时训练视频,是目前最大的开源双臂机器人数据集。 MolmoAct2采用创新的自适应深
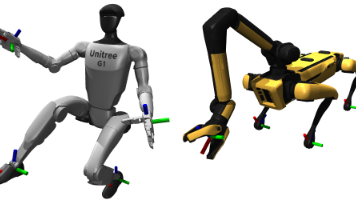
cuRoboV2提出了一种统一的高性能机器人运动生成框架,通过三大创新解决现有方法的局限性:1)基于B-样条的轨迹优化确保运动平滑性和扭矩限制;2)GPU加速的感知管道实现快速稠密距离场构建,比现有方法快10倍且内存消耗降低8倍;3)可扩展的GPU计算模块支持高自由度机器人,实现高达61倍的加速。实验表明,该系统在3kg负载下成功率高达99.7%,在48自由度人形机器人上实现99.6%的无碰撞逆运
摘要:PlaCo是一款基于C++开发的全身逆运动学与动力学求解器,提供Python绑定以支持快速原型开发。文档详细介绍了安装方法(PIP和源码编译)、机器人模型加载(支持URDF文件)、自碰撞检测配置、关节状态管理、坐标系变换工具以及可视化功能。关键特性包括:支持机器人构型积分与噪声添加、关节限制设置、转子惯量建模、三维轨迹插值(三次样条曲线)以及基于meshcat的可视化工具,适用于机器人运动规

Mink是一个基于MuJoCo物理引擎的微分逆运动学库,用于实时计算满足任务空间目标和约束条件的关节速度。它将问题建模为二次规划,支持多任务组合和优雅的约束处理。Mink采用物体坐标系表示速度和雅可比矩阵,提供配置封装来处理运动学量和积分。通过FrameTask可定义末端执行器的目标姿态,并控制收敛速度。示例展示了如何加载模型、设置目标姿态并运行IK循环,最终输出位置误差。该库适用于运动规划、机器
本文提出SOMA框架,旨在解决现有参数化人体模型(如SMPL、SMPL-X、MHR等)之间的异构性问题。SOMA通过三个抽象层实现统一表示:1)网格拓扑抽象层实现顶点级映射;2)骨骼抽象层通过闭式运算适配骨骼系统;3)姿态抽象层支持异构运动数据的转换。该方法将适配器复杂度从O(M²)降至O(M),支持端到端可微分处理,并兼容多种主流人体模型。实验表明,SOMA能有效整合不同模型的优势,为人体重建、

本文提出SOMA框架,旨在解决现有参数化人体模型(如SMPL、SMPL-X、MHR等)之间的异构性问题。SOMA通过三个抽象层实现统一表示:1)网格拓扑抽象层实现顶点级映射;2)骨骼抽象层通过闭式运算适配骨骼系统;3)姿态抽象层支持异构运动数据的转换。该方法将适配器复杂度从O(M²)降至O(M),支持端到端可微分处理,并兼容多种主流人体模型。实验表明,SOMA能有效整合不同模型的优势,为人体重建、
本文介绍了一个名为LeRobot的开源库,旨在解决机器人学习领域的碎片化问题。该库提供了端到端的技术栈,包括统一的机器人中间件API、标准化的数据集格式(LeRobotDataset)、优化的推理栈以及多种最先进机器人学习算法的实现。LeRobot支持多种低成本开源机器人平台(如SO-10X、ALOHA-2等),通过共享中间件实现便捷的遥操作和数据收集。其数据集格式已广泛应用于社区,截至2025年
Kimodo是一款基于700小时光学动作捕捉数据训练的运动学动作扩散模型,支持生成高质量的人体和机器人3D动作。其核心功能包括: 多模态控制:通过文本提示和运动学约束(关键帧、路径、末端执行器等)精确控制动作生成 交互式演示:提供网页端时间轴编辑器,支持实时3D可视化、多角色生成和约束编辑 跨平台支持:包含命令行接口和Python API,支持SOMA/G1/SMPL-X三种骨骼格式输出 高级配置
Kimodo是一个基于700小时商用光学动作捕捉数据集训练的运动学动作扩散模型,能够生成高质量的人体和机器人3D动作。该模型支持通过文本提示和多种约束条件(如关键帧、末端执行器位置等)进行控制,并提供数字人类和类人机器人两种模型变体。安装方式包括软件包安装和源代码安装两种,需要配置HuggingFace令牌以访问文本编码器。推荐使用GPU加速,最低需要17GB显存。项目提供命令行生成和交互式演示两

NVIDIA推出开源物理仿真引擎Newton 1.0,通过GPU加速实现机器人仿真领域的突破。该引擎整合了MuJoCo、Kamino等多种求解器,支持刚体、可变形体和颗粒材料的高保真仿真,并与IsaacLab/IsaacSim深度集成。Newton采用模块化架构,提供稳定的API接口,支持OpenUSD等主流机器人描述格式,并创新性地实现了基于SDF的碰撞检测和流体弹性接触建模。工业应用案例显示,
