- @weixin_112233
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
摘要:本文设计了一种基于PLC的工业搬运机器人系统,采用西门子S7-1200 PLC作为核心控制器,搭配伺服电机、气动夹爪和激光传感器等组件,实现物料的三维空间精准搬运。系统具备路径规划、位置检测、安全保护等功能,通过优化算法使定位精度达到±0.8mm,单次搬运时间小于20秒。经48小时连续测试,系统稳定性良好,抓取成功率达100%,满足工业车间高效精准的自动化搬运需求。

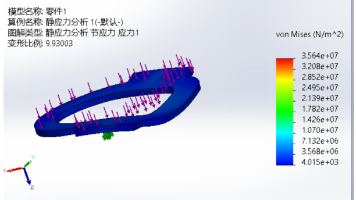
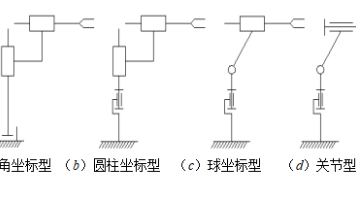
本文介绍了搬运机器人的总体设计方案,重点分析了机械结构部分。首先阐述了系统分析和技术设计两阶段的总体设计思路,确定了5自由度的圆柱坐标结构。详细说明了执行机构中手部、腕部的结构设计,包括滑槽杠杆式手爪和回转液压驱动的腕部。臂部设计采用液压缸伸缩机构,满足承载能力、刚度和运动速度的要求。通过力学分析和结构优化,实现了搬运20kg物料的功能需求。全文系统论述了搬运机器人各关键部件的设计原理、结构选型和
本文设计了一种基于STC89C52单片机的智能扫地机器人系统。该系统通过红外避障传感器实现障碍物检测,配合L298N电机驱动模块实现自动避障和路径规划功能,同时集成风扇吸尘装置完成清扫任务。硬件设计采用模块化思路,包括控制核心、传感器、驱动电路等模块;软件系统使用C语言开发,在Keil环境下完成编程调试,具有结构清晰、可移植性强的特点。经测试,该系统能有效实现自动避障和清扫功能,具有成本低、功耗小
本文介绍了自走式除草机器人的总体设计方案,包括系统组成、驱动方案选择及三维建模。系统由视觉系统、控制系统、驱动系统和执行系统构成,通过电机驱动实现精准控制。重点对比分析了电动机、液压和气动三种驱动方式的优缺点,最终选用电机驱动方案。采用SolidWorks软件完成了阶梯轴、底盘等关键部件的三维建模设计,为机器人制造提供了详细的技术支持。该系统具有结构简单、控制精准、适应性强的特点,适用于现代农业除
摘要: 本研究设计了一款基于STM32F429ZIT6单片机的智能物流搬运机器人,通过激光雷达、超声波及红外传感器实现环境感知与SLAM自主建图(定位误差≤±4cm),结合A*算法动态路径规划与PID电机控制,完成自主导航、避障(响应时间≤200ms)及物料搬运(负载10kg)。系统采用FreeRTOS多任务架构,支持远程调度与低电量自动回充,测试表明其作业效率较传统设备提升35%。未来可通过视觉
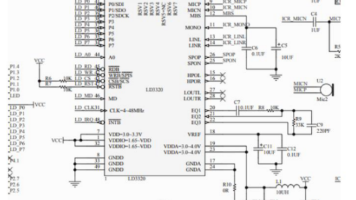
基于单片机的语音控制窗帘系统,核心目标是通过语音指令实现窗帘的自动开合、停止及状态切换,提升家居智能化体验,适用于家庭、办公室等场景。系统采用“语音识别-控制-执行”的闭环架构,以STC89C52RC单片机为控制核心,其丰富的I/O口资源与稳定的运算能力,可满足语音信号处理、电机驱动与人机交互需求。硬件模块围绕核心功能搭建,包含四类关键组件:一是语音交互组件,采用LD3320非特定人语音识别模块,
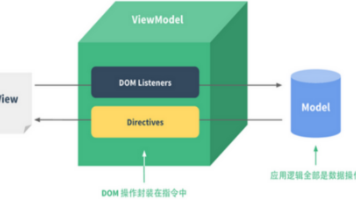
本文介绍了一个基于web的电商平台的设计与开发过程。系统采用B/S架构,前后端分离设计,前端使用Vue框架,后端基于SpringBoot。平台实现了商品浏览、购物车管理、订单支付、商家后台等核心功能,并优化了智能搜索、商品对比等用户体验。测试结果表明系统能稳定支持2000并发用户,平均响应时间1.8秒,兼容主流浏览器。该平台解决了传统电商操作繁琐、筛选低效等痛点,为消费者和商家提供了便捷的在线交易
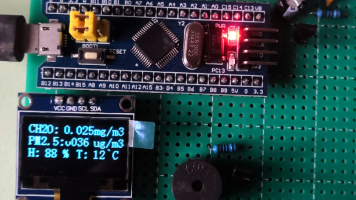
摘要: 本研究设计了一种基于STM32L431RCT6单片机的仓库环境监测系统,通过集成温湿度(SHT30)、CO₂(MH-Z19B)、烟雾(MQ-2)和照度(BH1750)传感器,实现多参数实时采集(温湿度误差≤±0.3℃/±1.5%RH)。系统采用NB-IoT远程通信与本地FLASH存储,支持异常分级预警(响应≤1秒)及执行机构联动,待机功耗仅420μA,双电源供电可续航8.5小时。测试表明数
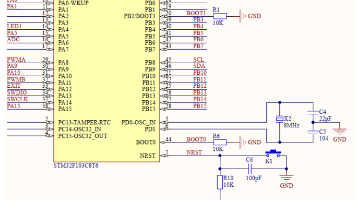
本文设计了一款基于STM32F103单片机的智能语音垃圾桶,通过离线语音识别(LD3320模块)和自动控制技术实现语音指令开盖与垃圾分类指引。系统采用四层架构,支持自定义唤醒词、四类垃圾仓自动开启、语音播报反馈(SYN6288模块)及LED状态提示,测试显示1米内识别率达98%,响应延迟0.6秒。相比传统垃圾桶,该设计避免了接触污染,降低了分类学习成本,未来可扩展红外感应、重量监测等功能,打造更智