- @weixin_41659040
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
摘要: 本文介绍了一种基于Arduino的BLDC电机驱动、视觉SLAM与IMU融合的自主跟随机器人系统。该系统通过视觉传感器(如OpenMV)进行目标识别与定位,结合IMU提供的高频姿态数据实现航向补偿,确保在复杂环境中稳定跟随。核心特点包括:多源传感器融合的抗干扰感知、视觉丢失时的IMU航迹推测、分层式双闭环运动控制,以及BLDC电机的高动态响应。典型应用场景涵盖智能仓储、服务机器人、安防巡检

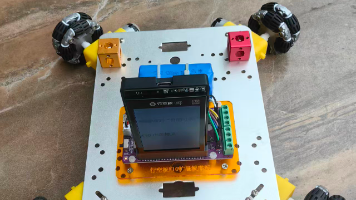
行空板K10是一款专为物联网和AI教育设计的国产开发板,集成了2.8寸彩屏、摄像头、麦克风、扬声器及多种传感器,支持离线图像识别、语音交互等功能。配合掌控板(带陀螺仪和无线通信)作为遥控器,可通过2.4G射频或BLE广播实现智能小车控制。实验展示了六通道简版遥控方案,利用姿态识别发送指令驱动差速小车,代码中整合了按键触发、无线通信和传感器数据处理功能,适用于STEAM教育中的物联网和机器人教学项目

本文介绍了一种基于Arduino与BLDC电机的智能机器人控制系统,该系统融合神经网络、强化学习和在线适应技术,实现了自适应控制。主要特点包括:采用深度强化学习策略替代传统PID控制,具备动态适应性和抗扰能力;支持"边干边学"的在线学习机制;采用云端训练+边缘推理的异构计算架构。典型应用场景包括复杂任务自适应操作、硬件故障补偿、电机参数智能整定等。文章还强调了系统实现中的关键注意事项,如算力边界划

Arduino BLDC机械臂控制摘要 本文介绍了基于Arduino的无刷直流电机(BLDC)多轴机械臂控制系统,包含三个核心代码示例:基础多轴控制、速度控制实现和复杂动作序列。系统采用SimpleFOC库实现精确电机控制,支持串口动态调速功能。关键特性包括: 多轴协同控制(3-7轴) 可编程速度调节(15-30级) 平滑运动轨迹算法 实时串口指令交互 应用场景覆盖工业自动化、医疗辅助和教育研究领

通过滑移检测,系统可以在检测到打滑时暂时屏蔽里程计数据,或触发重定位机制,保证定位的准确性。滑移检测和扭矩分配能帮助机器人在部分履带或轮子悬空时,切断或减小悬空轮的扭矩,将动力集中到有附着力的轮子上,提高越障能力。该系统能有效防止机器人在松软地面上陷车,通过检测打滑并限制扭矩,利用“蠕动”的方式脱困。必须确保电池的放电倍率和 ESC 的持续电流规格能满足最大扭矩输出的需求,防止电池过放或 ESC
本文介绍了Arduino BLDC结合动态窗口法(DWA)和滚动窗口重规划的技术方案,用于室内AMR机器人在复杂动态环境中的自主导航。系统通过滚动窗口机制实现局部环境感知和高频计算,利用DWA算法进行动态避障规划,结合BLDC电机的高动态响应能力执行平滑运动。文章详细解析了该技术的主要特点、应用场景(如仓储物流、服务导览机器人等)及关键注意事项(包括算力需求、参数调优、传感器数据处理和底层安全保护
本文介绍了一种基于Arduino的无刷直流电机(BLDC)机器人系统,专为尘雾等恶劣环境下的泄漏源追踪和动态路径规划而设计。系统采用多传感器融合感知方案,结合激光雷达、气体传感器等异构传感器网络,实现环境探测和目标定位。导航架构采用分层式设计,全局A*算法与局部动态窗口法(DWA)相结合,确保在复杂环境中实时避障。BLDC电机提供高扭矩和全地形适应能力,配合闭环矢量控制实现精准运动。应用场景包括化

摘要:本文探讨了基于Arduino与BLDC电机的多机器人协同系统,重点介绍了自适应旋转方向与弹性编队保持技术。该系统通过底层电机平滑控制、动态拓扑调整和分布式协同算法,解决了复杂环境下的多机协同难题。关键特性包括BLDC软换向控制、弹性队形重构和局部感知协同机制,适用于仓储物流、野外勘探等场景。文章还分析了算力瓶颈、通信同步等实施要点,并提供了V形编队的代码实现框架,展示了障碍规避时的智能旋转方
摘要: 本文探讨了基于Arduino与BLDC电机的多机器人系统中“RVO+DWA混合避障”技术的实现与应用。该技术通过分层架构(A*全局规划+RVO/DWA局部规划)实现动态环境下的高效协同避障,结合RVO的预测性碰撞避免和DWA的运动学优化,确保机器人平滑避障并回归全局路径。系统适用于仓储AGV、服务机器人及集群表演等场景,需注意算力瓶颈、非完整约束导致的死锁及通信延迟问题。文中提供了核心代码

行空板K10是一款专为物联网和人工智能学习设计的国产开发板,集成2.8寸彩屏、WiFi蓝牙、摄像头、麦克风等丰富资源,支持离线语音识别、图像检测等功能。本文通过全向福来轮四驱小车实验,展示了K10板在语音控制领域的应用。实验采用离线语音指令(如"前进""停车")控制小车运动,通过Microbit电机驱动库实现四轮全向移动,并实时在屏幕显示状态。开源代码演示了语音唤醒、指令注册及多方向运动控制逻辑,