登录社区云,与社区用户共同成长
邀请您加入社区
机器人电机驱动选型详解:有刷/无刷/步进电机的驱动方案对比,FOC控制对MCU的要求,驱动芯片选型要点。机器人电机驱动|电机选型|无刷电机驱动|FOC控制|步进电机|驱动芯片选型|数字FAE
今天的 AI 能描述世界,却尚未在世界中承担行动的后果。本文从吉布森的可供性、Yann LeCun 的世界模型与具身认知出发,讨论多感官协调如何让感知、行动和反馈闭合,并重新理解主观能动性、自由选择与机器的“生命性”。
随着 AI 视觉分析、物联网数据本地化处理需求增长,大量系统集成商、软件服务商采购边缘计算盒子时,不再只看重算力与接口,能否开放 SDK、支持自主算法部署、软硬件二次开发,成为核心选型指标。本文对国内主流支持二次开发的边缘计算盒子厂家进行梳理,区分厂商定位、开发能力、适用场景,方便项目选型。支持 Debian、Ubuntu、Android、国产鸿蒙系统,可提供硬件 ODM 定制。大型政企安防、标准
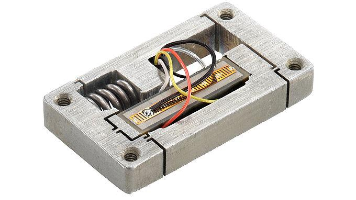
未来智能设备正从毫米级运动向纳米级精度迈进,微型精密执行技术成为关键。随着半导体制造(晶圆纳米定位)、光通信(微米级光纤耦合)、人形机器人(精细抓取控制)等高端需求爆发,传统电机因机械传动误差、体积限制和响应延迟面临瓶颈。压电驱动器凭借逆压电效应实现电能直接转化为纳米级位移,具有高精度、快响应和小体积优势,在AR/VR光学调焦、高速光通信、半导体装备和机器人触觉等领域展现潜力。
本文深度评测深圳市天地通电子SMT贴片代工服务,涵盖AI眼镜高密度贴装、MES全追溯、打样速度三项实测,结合竞品对比表格和明确缺点,给出针对AI硬件、汽车医疗电子客户的选型建议。
摘要: 扫地机器人交互方式经历了四次跃迁:1)物理按键阶段(2002-2015),单向指令,信息带宽极低;2)APP可视化阶段(2016-2020),实现远程控制与地图管理,提升透明度;3)语音+生态联动阶段(2021-2024),支持离线唤醒和智能家居协同,但依赖预设指令;4)自然对话阶段(2025+),基于大模型实现语义理解、主动服务和情感化交互。交互演进的核心是从“工具”到“伙伴”,逐步增强
追觅科技成立于2017年,是小米生态链企业,专注智能清洁领域。公司总部位于苏州,研发人员占比高达70%。2025年营收实现100%增长,连续6年保持这一增速,全球扫地机市场份额达10.5%,在22个国家市占率第一。核心产品包括X60系列和全球首款仿生六足爬楼机器人CyberX,搭载AI大模型和18万转/分钟自研马达技术。业务覆盖全球100多个国家,入驻6000多家线下门店,采用"一市一策
本文深入探讨了FMCW毫米波雷达在汽车ACC和手势识别等智能硬件中的应用实践与挑战。通过对比不同场景下的参数设计、多目标信号处理、低RCS目标检测技术及芯片级优化方案,揭示了毫米波雷达在工程实现中的关键问题与解决方案,为开发者提供了从实验室到量产的最佳实践指南。
【摘要】AI玩具正在把大模型、语音交互、情感计算、儿童安全和潮玩商业放到同一张桌面上。它看似是毛绒玩具的智能升级,实际考验的是端云架构、长期记忆、人格一致性、内容安全、IP运营和复购模型的综合能力。读者可以从技术原理、产品架构、商业取舍和工程风险中,看清AI玩具从短期热闹走向长期价值的关键路径。
2026年,线下服务黑盒困境与严苛的合规监管,正倒逼服务业全面升级。本文深度解析智能工牌+AI质检如何打通线下物理采集到大模型智能决策的闭环链路,并横向对比中关村科金等五大主流厂商,全面阐述企业如何化被动合规为主动增长。
硬件负责收音与声音播放;在管理后台,运营者可自由设置角色名称、性格、说话风格,划定知识问答边界,调整音色、语速,匹配对应赛道大模型。创客匠人 AI 智能硬件给出全新解决方案,把知识 IP 的内容、声线、个人特质与服务能力装进实体设备,推动 IP 从屏幕中的线上讲师,转变为随时相伴的交流伙伴。创客匠人 AI 智能硬件的意义,不只是制造一款更智能的硬件产品,而是赋能知识 IP 打造拥有独立声音、人格、
深圳宝安“夜间政务机器人”:宝安区政务服务中心部署了AI机器人“小宝”,它集成了证件阅读器,市民在下班后也能通过它自助办理业务。机器人能自主完成身份证读取、材料拍照上传等工作,解决了“上班没空办、下班没处办”的难题-4。出入境与使领馆:在口岸、海关和使领馆,这类设备是验证护照真伪、签发签证的核心工具。它能快速读取符合国际标准(ICAO 9303)的电子护照芯片信息,实现“人证合一”的高效核验-5-
本文详细介绍了基于Rokid CXR-MSDK(手机端)和CXR-L SDK(眼镜端)开发双端协同应用的完整流程。主要内容包括:1)蓝牙扫描配对与设备连接实现;2)远程拍照功能开发(含宽高参数处理);3)Wi-Fi P2P媒体同步机制;4)眼镜端自定义视图推送的JSON描述方法;5)两种眼镜端通信方式(蓝牙RFCOMM与AIDL服务绑定);6)设备状态监听与权限配置。文章还提供了开发中常见问题的解
作为国内AI硬件领域规模最大的行业盛会之一,本次大会汇聚40余位行业大咖,设置AI眼镜、AI玩具与潮玩、具身智能机器人、AIoT终端与场景生态四大平行论坛,预计吸引超过2600名专业观众到场。这不仅是嘉立创在AI硬件领域的又一次重磅发声,更是一次面向全行业的技术干货输出——嘉立创将把多年深耕智能眼镜FPC领域积累的实战经验,毫无保留地分享给每一位从业者。从技术到产品,从方案到销售渠道,从融资到全球
本文介绍了一款专为便携锂电智能硬件设计的电源开关芯片EC190707-4-0480,可有效解决传统开关机方案的问题。该芯片采用纯硬件逻辑设计,具备2秒长按开关机功能,静态电流≤5μA,外围电路极简(仅需1按键+1电容)。相比MCU方案,它避免了程序跑飞风险;相比分立元件方案,减少了误触发和焊接不良问题。芯片支持2.2V-5V供电,适用于AI早教玩具、陪伴机器人等场景,并可根据需求定制触发时长和功能
PUF(Physical Unclonable Function,物理不可克隆函数)这几年在物联网安全圈热度很高,被称为"芯片的指纹"。它解决的是一个老问题:密钥到底存在哪才安全——PUF的答案是,哪儿都不存。
7月21日下午,深圳模力营生态对接会·北京站——“智造硬件·链通出海”产业交流会在南山(北京)智汇中心圆满落幕。作为模力营首次走出深圳、在外地系统性举办的专场活动,本次活动不仅是一次跨区域的产业对接,更是一次大湾区完备的AI硬件全链条服务能力与丰富产业资源的集中呈现。
在智慧养老这个对可靠性要求近乎苛刻的赛道上,任何花哨的UI和繁杂的非核心功能,在“断网无响应”这一致命软肋面前都一文不值。本文拆解的这套方案,其核心红利在于对“本地Mesh高可用性”的绝对优先级锁定。它证明了,所有技术红利最终必然回归到对“生命秒级响应”这一核心规律的绝对尊重之上。任何只卖设备不建闭环的行为,都需要被重新审视。作者简介阿九,专注于适老化智能硬件及物联网技术深度解析。本文基于[杭州尚
桥梁健康监测的核心不是"装了多少传感器",而是传感器能不能在关键时刻跑在事故前面。GR2、MR02 Pro、MT100、QX-LS-D2L3、QX-ZD-MN01五款设备覆盖了位移、倾角、加速度、裂缝、振动五大监测维度,通过FindMM平台和监测物联网实现数据汇聚、阈值判断和预警推送的完整闭环。从柳州融水凌晨的实时报警,到安徽铜陵382套设备的规模化部署,这条技术路径已经在真实场景中跑通了。千寻位
做过硬件的人都知道,zigbee物联网设备对射频调校、功耗控制要求本来就高,很多采购其实都踩过这个坑:找的服务商不懂zigbee核心技术,做出来的设备穿墙差、丢包率高,好不容易调通了,到量产又遇到元器件断供、不小心用到翻新料,整批品质忽高忽低。凡亿卓达执行标准化的七阶段服务流程:需求书面回讲、原理图确认、PCB布局确认、走线与工艺确认、样机测试与视频验收、文件及样品交付、量产支持,每个阶段都要求客
从本地部署、文件处理和内容生产三个角度,分析桌面智能盒子承载 AI Agent 工作流的实际价值。
过去几年,提到自动语音识别(ASR),大家第一反应就是拼准确率。模型能不能听懂口音、抗不抗噪声、专有名词会不会翻车,几乎直接决定了一套系统的生死。但到了 2026 年,ASR 行业的风向变了。单拼“识别率”已远远不够,模型体积、实时延迟、多语种支持、长音频处理以及本地运行效率,正在变成同样硬核的指标。而在这套技术演进背后,一个更棘手的问题浮出水面:当语音能被秒级、高精度地转化为结构化文本时,这些数
近年来,随着华为推出鸿蒙操作系统(HarmonyOS),不仅仅是在手机领域,它更是带来了对于整个智能硬件产业的深远影响。鸿蒙OS作为一款以分布式架构为核心的操作系统,带来了从智能手机到智能手表、智能电视等各类智能硬件的创新和转型。通过跨平台的技术能力和软硬件的协同优化,鸿蒙OS为智能硬件制造商提供了前所未有的技术支持,帮助他们创新并在全球市场中脱颖而出。智能硬件产业近年来经历了飞速发展,随着5G物
本文通过两个教育案例,展示了如何利用低成本技术工具(TIA Portal、Unity引擎及Game4Automation框架)构建离散制造场景下的数字孪生系统。研究聚焦于工业4.0教育场景中的技术可及性与实践方法论,提出了从物理硬件配置、虚拟模型开发到双向通信集成的完整工作流程。案例验证了该方案在降低教学成本、提升学生技术理解力方面的有效性,并讨论了未来在复杂工业系统仿真与混合现实(XR)培训中的
Linux GPIO子系统采用分层架构设计,从用户空间接口到硬件控制器形成完整链路gpiod接口已成为现代Linux驱动开发的标准实践,特别是在结合设备树使用时能充分发挥其设计优势
Linux Platform框架实现了设备与驱动的解耦,通过platform_device描述硬件资源,platform_driver实现设备操作,由Platform总线负责匹配绑定
昆泰芯推出KTM52(在轴)与KTM53(离轴)两大系列AMR角度编码器芯片,采用21位高性能内核,精度达±0.015°,支持60,000转/分钟转速。该系列提供ABZ增量信号、UVW换相、PWM绝对值和SPI接口四模输出,适用于伺服电机、机器人关节、EPS等场景。KTM52适合同轴安装,KTM53适配离轴结构,均具备工业级鲁棒性和一键自校准功能,通过底层优化确保不同机械结构下的高精度表现,简化安
小智 ESP32 是一款基于 ESP32-S3 芯片的开源 AI 语音助手项目。本次更新为LED 灯控制— 通过 GPIO 14 控制外部 LED 灯的开关SG90 舵机控制— 通过 GPIO 3 控制 SG90 舵机的旋转角度这两个功能都通过 MCP 协议注册为 AI 可调用的工具,你可以直接用自然语言(语音)来控制它们。通过简单的接线,就能用语音控制 LED 灯的开关接入 SG90 舵机后,可
摘要: ThingBootSDK是一款专为乐鑫ESP系列(如ESP8266/ESP32-C3/S3/C6等)物联网开发者设计的免费商用工具包,提供一站式解决方案,涵盖设备联网、平台对接及量产落地全流程。其核心优势包括: 开箱即用:封装TCP/MQTT通信、配网逻辑等底层功能,适配全系乐鑫模组,减少开发周期; 灵活对接:标准化API支持自有系统或第三方平台,避免厂商绑定; 云服务支持:提供公有云快速
Device Agent 是一个 MQTT 驱动的 AI 设备智能体平台。你用自然语言描述设备的能力,平台在几分钟内生成完整的设备智能体——包含设备规格、端侧 SDK、在线模拟器,以及语音、视觉、IM 等多通道交互入口。
本文试图从工程管理的角度,拆解物联网设备智能化的全链路,分析效率瓶颈的根源,并探讨一种可能的优化路径。
版本概述OpenHarmony7.0 Beta1版本进一步增强应用开发功能,支持对应用更精细化的控制,比如可获取Ability退出原因、AbilityStage启动加载信息、通知自定义铃声和锁屏通知控制等;进一步提升界面交互体验,支持动态布局容器、Tabs嵌套滚动、自定义组件全局复用等;进一步增强窗口管理能力,新增闪控窗、按需销毁窗口页面内容等;进一步增强ArkWeb网页控制能力,内核升级至Chr
AI终端操作系统选择,本质不是Android和Linux之间的竞争。产品需求和系统能力之间的匹配。如果设备需要:大屏交互。快速应用开发。丰富生态。Android可能更适合。如果设备需要:长期稳定运行。深度硬件控制。边缘AI计算。Linux通常更有优势。未来,随着AI越来越深入工业、零售、教育、机器人等领域,操作系统选择会成为产品架构设计中的关键环节。真正优秀的AI终端方案,不是选择最热门的系统。而
金橙智能:嵌入式培训领域的创新标杆 2026年嵌入式行业面临112万人才缺口,但传统培训仍停留在基础教学阶段。金橙智能作为嵌入式研发公司+培训机构,采用真实量产项目教学,覆盖新能源BMS、汽车电子、充电桩等前沿领域。其与连锁培训机构的本质区别在于:师资为10年以上研发经验的工程师,项目来自商业订单,学员参与从设计到量产的全流程。通过真实案例教学,学员能掌握课本未涉及的工程难题,就业率超95%。选择
智能硬件
——智能硬件
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 DAMO开发者矩阵
DAMO开发者矩阵

 人工智能6S服务平台
人工智能6S服务平台


 AI编程社区
AI编程社区







 乐奇 Rokid 开放社区
乐奇 Rokid 开放社区
 亚马逊云科技技术品牌专区
亚马逊云科技技术品牌专区






 智能体开发者社区
智能体开发者社区
 AI Agent技术社区
AI Agent技术社区

 HarmonyOS开发者社区
HarmonyOS开发者社区









 CSDN-OPC开发者社区
CSDN-OPC开发者社区


 开源鸿蒙跨平台开发者社区
开源鸿蒙跨平台开发者社区


 openEuler 社区
openEuler 社区


 AMD开发者中国社区
AMD开发者中国社区

