




- @Tony_Shen
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
摘要: ESP-WHO是乐鑫专为ESP系列芯片设计的边缘AI视觉开发框架,提供低门槛人脸/物体/手势识别方案。其四层架构(应用层、核心组件、ESP-DL推理、底层驱动)基于ESP-IDF,支持异步流水线处理。内置MTCNN人脸检测、ArcFace识别等模型,深度优化INT8量化与NNA加速,适配ESP32-S3/P4等硬件。

ESP-Claw和MimiClaw是面向物联网设备的AI智能体框架。ESP-Claw基于ReAct模式,通过Lua脚本动态控制硬件,支持热更新;MimiClaw则是纯C实现的极简版,功能固化但资源占用低。两者均可在ESP32芯片上实现本地感知-决策-执行闭环,但定位不同:ESP-Claw适合灵活多变的通用场景,MimiClaw适用于固定功能的专用设备。分析指出,AI智能体更适合通用多变场景,传统嵌

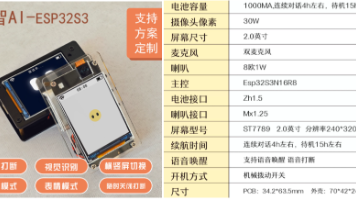
本文系统分析了ESP32-S3-CAM轻量化嵌入式视觉平台的硬件架构与技术特性。相比初代ESP32-CAM,新一代产品在处理器性能(XtensaLX7双核)、图像带宽(40MHzPCLK)、内存容量(标配PSRAM)、成像质量(GC2145传感器)等方面实现全面升级,新增UVC虚拟摄像头功能,并具备轻量化AI推理能力。文章详细对比了两代硬件的参数差异,指出ESP32-S3-CAM在流媒体稳定性、功

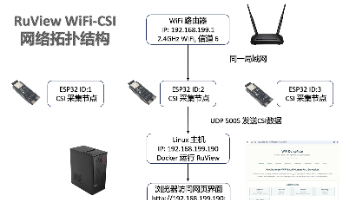
摘要:nexmon_csi是基于nexmon框架的Wi-Fi信道状态信息(CSI)采集工具,专为树莓派4B的博通Wi-Fi芯片设计,可提取无线信号的幅度和相位数据。该工具支持802.11a/g/n/ac协议,通过UDP端口输出原始复数数据,适用于无线感知、行为识别等研究。部署需RaspberryPiOS(Buster)系统,提供预编译版本简化安装。数据采集使用tcpdump捕获pcap文件,配套P
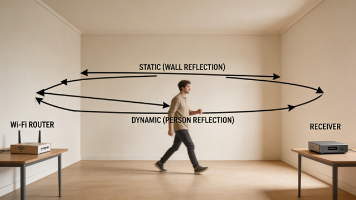
RuView(WiFiDensePose)是一个基于ESP32-S3的开源WiFi感知系统,利用WiFi信号实现无摄像头的人体姿态估计和生命体征监测。核心功能包括穿墙检测、呼吸/心率测量、多人追踪等,通过4-6个低成本传感器节点实现亚英寸级定位精度。系统采用AI信号处理技术,可自主学习环境特征,支持本地运行和实时监控。相比传统方案具有隐私保护、穿透性强、成本低等优势,适用于医疗监护、智能家居、零售

RuView(WiFiDensePose)是基于ESP32-S3的WiFi CSI感知开源项目,支持非接触式人体姿态估计和生命体征监测。项目采用Rust重写后性能提升810倍,需在Linux环境下配置Rust1.70+、OpenBLAS等依赖。源码编译需解决ruvector-mincut依赖缺失、CLASSES未找到等三个主要问题,通过修改main.rs文件和添加依赖项完成修复。编译后运行服务端程
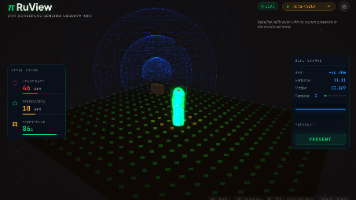
RuView开源项目的EPS32节点程序配置与上传,服务器端的docer部署方式,功能测试说明。
介绍一个开源的基于 ESP32 的聊天机器人项目,对其技术架构进行初步分析。
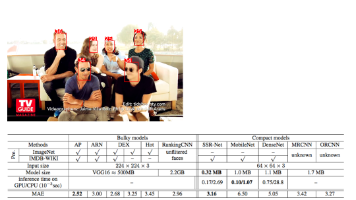
SSR-Net是一种超轻量级年龄/性别识别模型,其CoreML版本仅0.17MB,性能接近主流大模型。采用多阶段回归策略,将年龄估计分解为多个小粒度分类任务,解决量化分组问题。支持实时摄像头检测,结合LBP或MTCNN人脸检测器实现高效推理。提供IMDB/WIKI/Morph2等数据集预训练模型,适合移动端及资源受限场景。模型以JSON+H5格式存储,输入64x64 RGB图像,输出年龄值或性别分
ESP-Claw和MimiClaw是面向物联网设备的AI智能体框架。ESP-Claw基于ReAct模式,通过Lua脚本动态控制硬件,支持热更新;MimiClaw则是纯C实现的极简版,功能固化但资源占用低。两者均可在ESP32芯片上实现本地感知-决策-执行闭环,但定位不同:ESP-Claw适合灵活多变的通用场景,MimiClaw适用于固定功能的专用设备。分析指出,AI智能体更适合通用多变场景,传统嵌