登录社区云,与社区用户共同成长
邀请您加入社区
将业务系统API直接开放给AI Agent存在安全风险,需通过工具白名单机制控制其可见性。关键点包括:1) 区分API可用性与Agent可见性,显式声明允许Agent调用的能力;2) 减少无关工具可提高模型选择准确性;3) 提示词无法替代工具可见性控制;4) 不同场景应呈现不同能力集合;5) 采用显式opt-in机制,避免新增API自动扩大Agent权限。工具白名单作为第一道安全边界,需结合业务系
动态内存管理在C++中历来是开发者的挑战,而智能指针通过将内存分配与对象生命周期绑定,显著提高了代码的安全性和可维护性。此外,C++17引入了std::pmr(多态内存资源)与智能指针的集成,进一步简化了动态内存管理的定制化。例如,对于使用特殊分配器分配的内存,或需要调用特定清理函数(如fclose for FILE)的资源,定制删除器提供了灵活性。对于unique_ptr,删除器类型是模板参数的
好的,请看以“C++智能指针现代内存管理的最佳实践”为主题的文章。
ISP 的核心是避免客户端被迫依赖不需要的方法,通过将大型接口拆分为专注的小接口来提高代码的灵活性、可维护性和可测试性。从软件设计角度看,接口隔离原则避免“胖接口”(fat interface)和“万能基类”(God Interface),让系统更灵活、更易维护。换句话说,一个接口(或抽象类)应该尽可能小而精,不应把不相关的功能塞进同一个接口里,让使用者承担无意义的依赖。依赖于抽象(接口/协议),
如果你是一个喜欢捣鼓硬件的开发者,你可能对各种"能跑AI的板子"有个大概的心理价位。树莓派4B四百多,还没算摄像头和NPU——AI推理全靠CPU硬算,人脸检测个位数帧率。Jetson Nano性能够了,但千元起步,功耗7-15W,接电池基本别想。ESP32-CAM十几块钱,但那是MCU,没有Linux,没有NPU,所谓的AI基本只能推图到云端。作为一个想玩AI摄像头的人,你大概希望有这么个东西:几
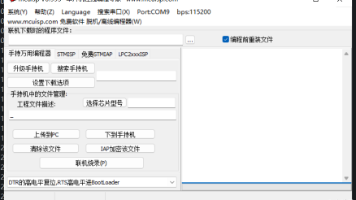
点击清除芯片,重新上电,等待清除完成接触读写保护即可。仅需使用FlyMcu按照下面的配置。
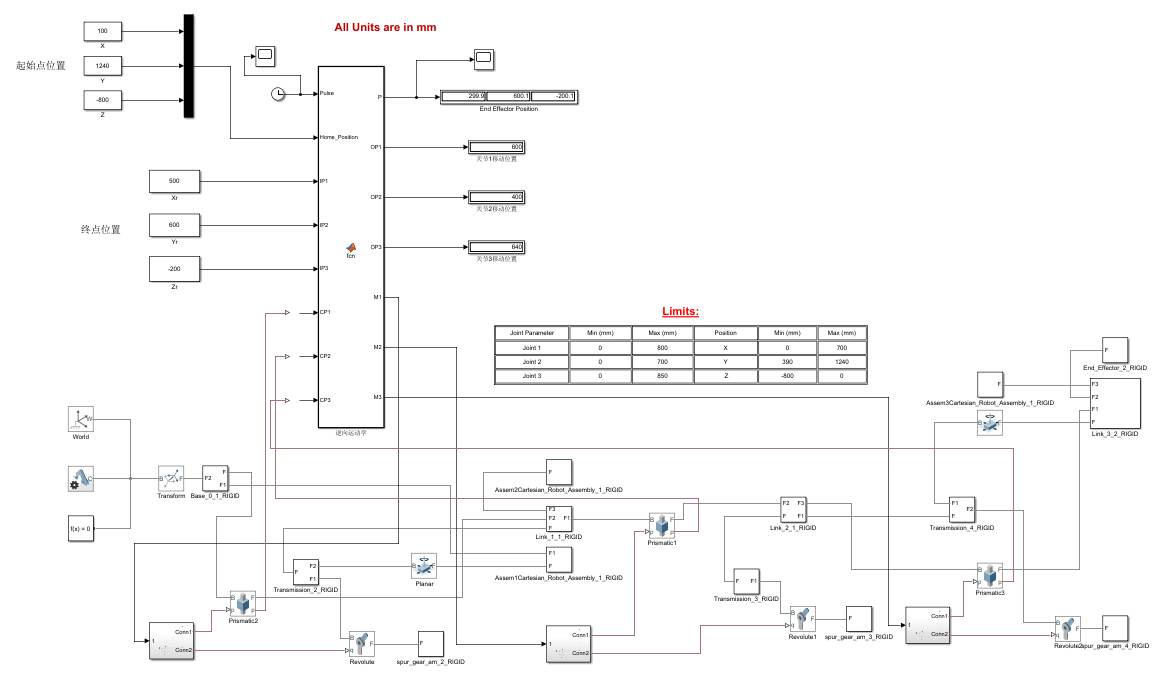
别被那个突然弹出的坐标系吓到,那堆红绿蓝箭头就是机器人的身份证,X轴方向的直线导轨正在模型里闪着银光。右键点击模块选Mask Editor,画个萌萌的机器人图标,仿真时看着自己设计的封面在动,成就感比写完代码瞬间更持久。仿真模型里那些跳动的曲线,此刻都化作现实世界中精准的机械运动,连空气里都飘着淡淡的润滑脂味道。这铁家伙的机械臂正悬在距离我鼻尖三十公分的位置,屏幕上跳动的MATLAB报错提示让我意
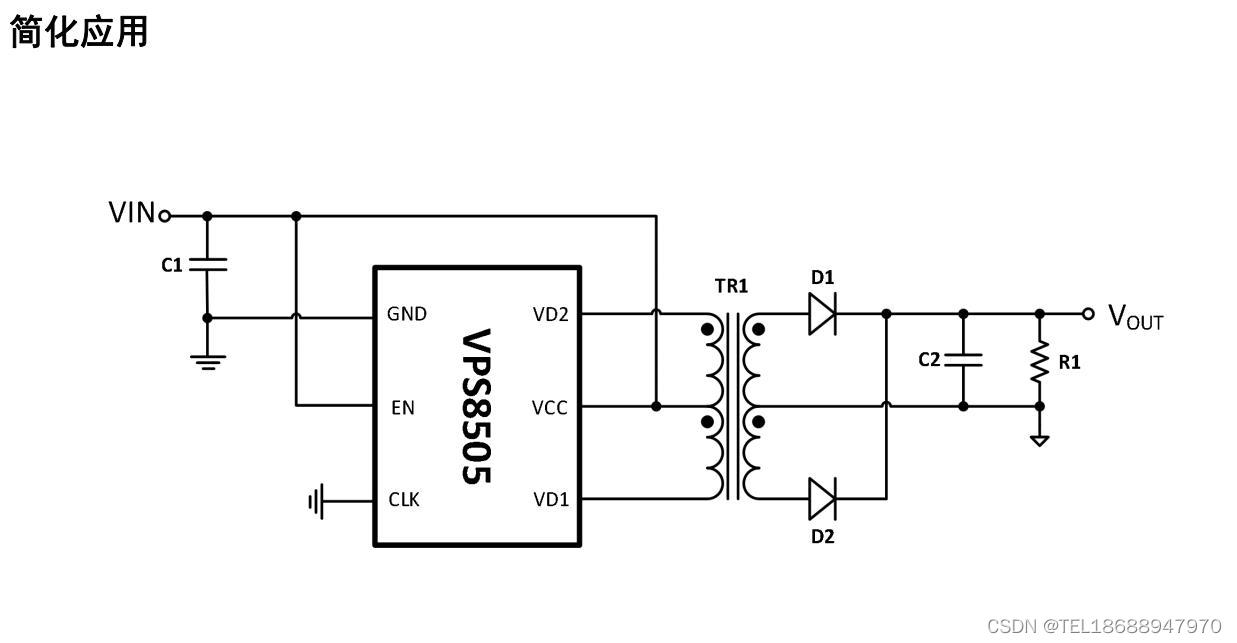
CAN\RS-485\RS-232\SPI\I2C 等低功耗隔离电源。路,即可实现 3.3V 或 5V 输入、3.3V~24V 输出、输出。对称结构设计,能有效确保两个功率 MOSFET 的高度。VPS8505 芯片内部集成振荡器,提供一对高精度。率隔离电源而设计的推挽式变压器驱动器,其外围只需。功能和频率同步功能,同时内部设计有高精度的死区控。匹配简单的输入输出滤波电容、隔离变压器和整流电。分布
跨境电商运营中,IP选择直接影响账号安全。静态ISP代理适用于TikTok和亚马逊的主力店铺,IP固定稳定;动态ISP代理适合测试或辅助账号,但需控制切换频率。建议成熟团队采用混合部署策略:核心业务用静态IP保证稳定性,边缘业务用动态IP拓展规模。选择服务商时,应根据业务需求匹配产品类型,并先进行小规模测试。关键原则是"静态保核心,动态做扩展",不同业务阶段采取不同IP策略。
XS5018A 是一款针对 CMOS 图像传感器的高性价比图像信号处理芯片,支持 1M/2M 像素图像传感器,一组10-bit DVP 输入接口,ISP 具备优异的 3D 降噪功能,标清模拟输出支持 960H,高清模拟输出支持HDCCTV 720P/1080P,高度集成外围器件,简化产品设计,内嵌 CPU 处理器,可以实现灵活的软件应用。典型功耗:220mW。
XS5037C是一款应用于专业安防摄像机的图像信号处理芯片,支持 MIP! 和 DVP 接口,最大支持 5M sensor接入。内置高性能 ISP 处理器,支持 3D 降噪和数字宽动态。标清模拟输出支持 960H,高清模拟输出支持 HDCCTV720P/1080P/4M/5M。高度集成外围器件,简化产品设计,内嵌 CPU处理器,可以实现灵活的软件应用。
本文深入对比了ISP代理与数据中心代理在网页抓取中的核心差异与适用场景。数据中心代理(托管ASN)价格低、速度快但易被反爬系统识别,适合无防护的开放目标;ISP代理(消费侧ASN)虽成本较高,但具备住宅IP信任度,能有效绕过反爬防御,适合受保护站点。关键选择依据是目标的反爬强度:若需住宅信任且兼顾速度稳定性(如电商、社交平台抓取),ISP代理是最优解;而对开放数据或自有服务,数据中心代理性价比更高
眺望电子基于瑞芯微 RV1126B/RK35xx 系列处理器,打造覆盖硬件核心板、ISP 调优、AI 模型部署、业务算法集成的全栈视觉中间件平台。平台提供标准化 SDK、预训练模型仓库与可视化调试工具,帮助客户从"传感器出图"到"AI 业务上线"缩短 60% 开发周期。本期聚焦:RV1126B 核心板内置 AI-ISP 硬件引擎,通过深度学习模型实时分析画面内容,动态调整噪声抑制、清晰度、对比度、
实际测试下来将boot0引脚拉高到3.3V,boot1引脚(PB2)拉低。芯片会进入执行内部芯片Bootloader程序。可以通过SWD口烧录。也可以进入仿真,但是打断点无法进入主函数进行仿真调试。今天领导问到了这个问题。
现场,多款BOSMA博冠6K全画幅摄像机VEGA H2搭载长步道电影镜头进行展示,携手致迅小尺寸监视器与无线图传、百视悦专业监视器、南光灯光设备、图瑞斯专业三脚架,以及卓尔、斯莫格等专业品牌电池等产品,为现场用户直观呈现了一套轻量化、高效率的现场拍摄工作流。作为一款面向专业影像创作者的全新机型,VEGA H2在展会上获得了大量实战视角的使用建议。VEGA H2搭载35mm全画幅CMOS传感器,有效
做跨境运营、TikTok或者AI应用,最怕的就是账号被封、流量限流。其实,底层的关键往往在于你用的 IP质量。这组图带你彻底拆解“顶级IP”的门道!1、ASN 运营商属性:IP归属于基础网络运营商(如NTT、中华电信、Bunny等),而非廉价的IDC机房托管商。3、地理坐标原生:注册地与实际机房物理定位完美契合,拒绝跨域广播,还原最真实的本地用户特征。2、企业直属运营:IP注册主体直接就是运营商,
按下key0,提示“Illegal SRAM APP!按下key1,提示“No APP!按下key2,提示“No APP!按下key2,提示“no app!开发板:DMF407电机开发板。平台:keilV5.31。单片机 :STM32F407。一、bootloader。二、Flash_APP。三、SRAM_APP。
本文摘要: 本文系统分析了Linux 5.10内核中多个关键硬件控制器的驱动实现,包括ISP图像处理器、SDHCI存储控制器、GPU图形处理器、PMIC电源管理、SARADC模数转换器、NPU神经网络处理器、以太网MAC控制器、MIPI D-PHY接口和MDIO总线控制器。每个控制器章节均包含硬件架构解析、核心代码实现、调试方法及性能优化策略,重点阐述了各控制器在PlatformBus中的位置、寄
ISP 是互联网中的核心基础设施。它不仅仅是:“给你装宽带的公司”网络接入提供者IP 地址分配者全球网络连接者数据传输运营者互联网 = 全球道路系统ISP = 修路 + 接入道路的人网站无法访问云服务无法连接视频无法播放游戏无法联网它是现代互联网真正的“入口”。
ISP算法是数字成像的核心,从基础的黑电平校正到先进的深度学习处理,每个环节都直接影响最终图像质量。通过深入理解算法原理、掌握代码实现技巧,并结合实际场景优化参数,才能开发出高性能的ISP系统。未来随着AI技术的发展,ISP将更加智能化,但传统图像处理技术仍将是基础。建议开发者既要掌握经典算法,又要跟进前沿技术,在实践中不断积累经验。
实测在RTX3060上跑50帧/秒稳如老狗,Jetson Xavier这种边缘设备也能跑到8帧,精度控制在1.5%误差带,比某些万元级3D相机还实在。在Jetson上跑的时候,把视差范围从96砍到64,精度只降0.3%但帧率直接翻倍。整套源码扔在GitHub上,C++版带了TensorRT加速,Python版适合快速验证。别用鱼眼镜头,普通6mm定焦镜头足够,畸变校正用OpenCV现成方案就能搞定
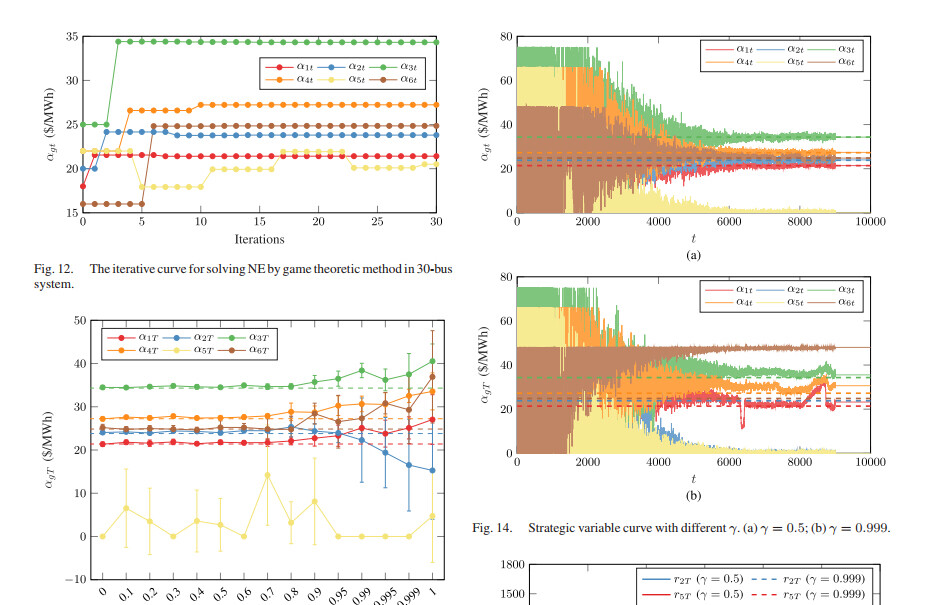
python代码:基于DDPG(深度确定性梯度策略)算法的售电公司竞价策略研究关键词:DDPG 算法 深度强化学习电力市场 发电商 竞价说明文档:完美复现英文文档,可找我看文档主要内容:代码主要研究的是多个售电公司的竞标以及报价策略,属于电力市场范畴,目前常用博弈论方法寻求电力市场均衡,但是此类方法局限于信息完备的简单市场环境,难以直观地反映竞争性的市场环境,因此,本代码通过深度确定性梯度策略算法
在新一轮数字化浪潮席卷全球之际,人工智能正迅速成为化工行业提质增效的核心动力。生产车间借助 AI 对工艺参数进行精细预测和动态调优,废品率显著下降,产品质量与产量同步攀升;供应链端则利用智能算法剖析历史销售与市场脉动,生成更精准的补货方案,大幅压缩库存占用。所有这些创新实践背后,离不开浪潮信息所提供的高性能算力与可靠平台支持。
如果本文帮助到了你,欢迎[]哦~准备工具硬件软件开始救砖注意事项Digispark被我玩崩了,BootLoader固件被覆盖了,导致Arduino无法烧录代码了,需要重新烧录BootLoader。
修改作用:由于使用系统默认端口的风险较大,容易被攻击软件扫描以及攻击,为避免因端口攻击而无法远程连接云服务器,您可将云服务器默认远程端口修改为不常见的端口,提供云服务器的安全性。“新建入站规则向导” 窗口的 “操作” 步骤中,选择【允许连接】,单击【下一步】。1.修改注册表2个地方Tcp 和 RDP-Tcp。1.修改注册表2个地方Tcp 和 RDP-Tcp。2.需将新的端口添加至防火墙并设置允许连
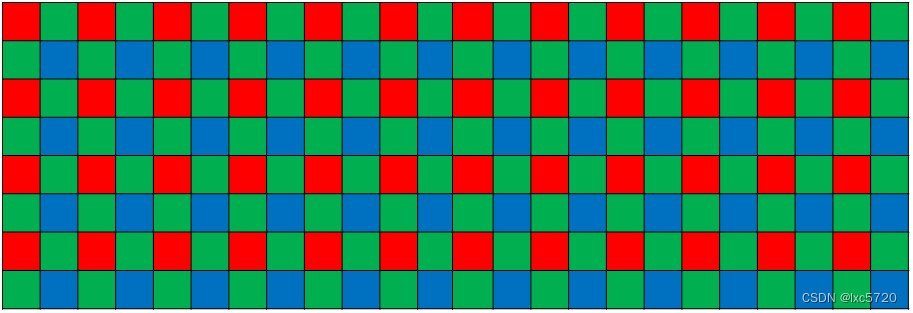
在 Bayer 格式排列的图像中,每个像素的颜色信息是不完整的,因为它只包含了一个颜色通道的数据。为了获得完整的彩色信息,我们需要使用邻近像素的值来估计缺失的颜色。双线性插值是一种常用的插值方法,它使用周围四个已知像素的加权平均来估计缺失像素的值,从而恢复出完整的彩色图像。双线性插值是一种简单的去马赛克方法,用于恢复单一传感器采集的图像中缺失的颜色信息。虽然它在许多情况下效果良好,但也有一些优点和
【问题描述】编写一个函数isprime(n).判断整数n是否为素数.编写程序使用此函数,当输入一个整数时,对它进行判断,当为素数时,输出1.否则,输出0.【输入形式】控制台输入一个整数.【输出形式】控制台输出判断结果0或者1.【样例输入】45【样例输出】0【样例说明】45非素数,故输出为0#include <iostream>using namespace std;int n;int
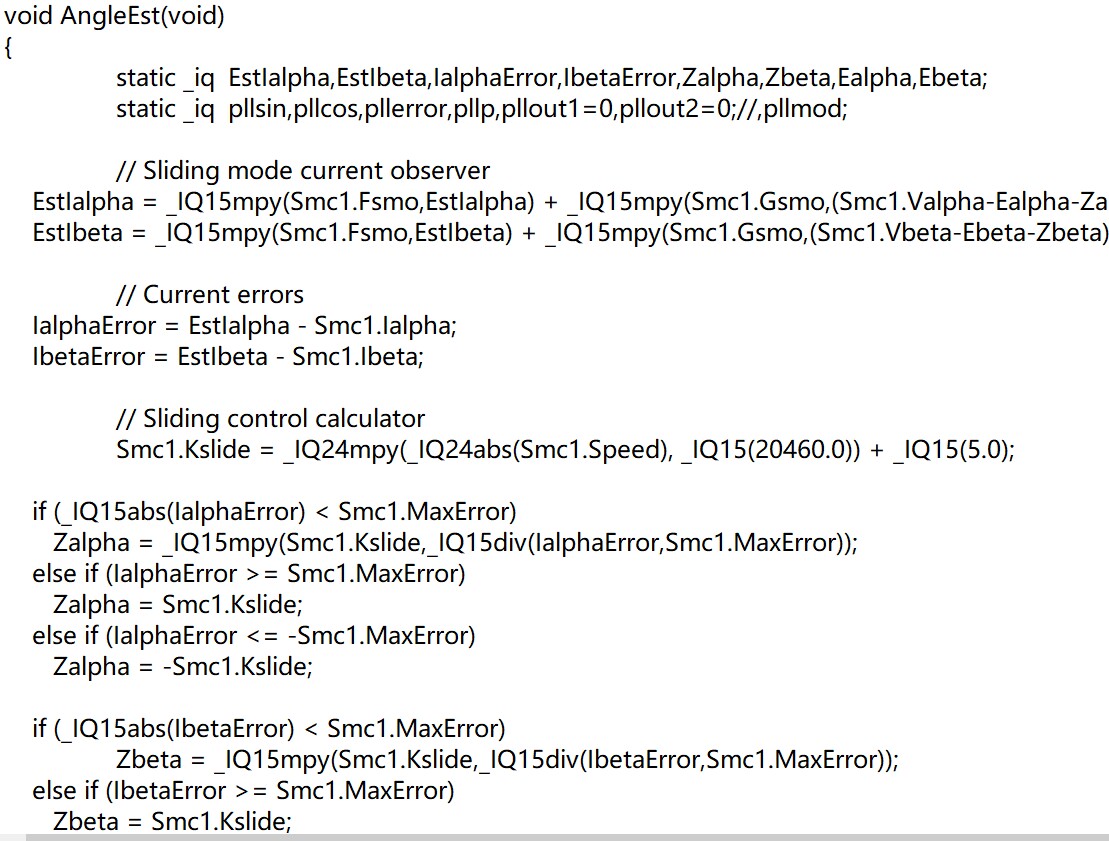
每一条寄存器位都写了“为什么”而不是“写什么”;每个算法参数都给出整定脚本路径;每个中断都标注了“运行时间 + 栈深”;每个故障都给出“硬件 + 软件”双重检测;把它当成“固件说明书”直接交给产线,工人也能照单抓波形、改参数、写校准。这才是真正的“量产级”——不靠天才工程师,靠代码自己说话。
(科普一下:被设置为读保护的芯片去除读保护时会将片内所有Flash擦除(0xFF),这也就是FLYMCU串口下载程序时的第一步擦除芯片的方法,先将Flash设为读保护,再解除读保护。先前使用的是FLYMCU的串口下载,可能是因为下载过程中出现BUG从而导致被读保护,但是这种被读保护不是那种名正言顺设置的,所以可能就造成了这种flash读取保护等级紊乱的BUG,而且解保护无法正确进行,所以先进行读保
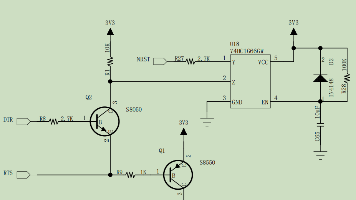
我们主要是分析上电瞬间的逻辑关系,单片机上电时我们通过示波器观察波形得知 DTR 和 RTS 的电平是变化的,但是也有一个规律就是:只要 RTS 为低电平的时候,DTR 的电平也是低,因此一般情况 Q2 不会导通,但由于这两个 IO 口的电平存在“竞争冒险”,会出现 RTS 的下降沿的时候刚好遇到 DTR 的上升沿,这个时候 Q2 导通,导致系统复位,而 BOOT0 此时有可能也为高电平,就会进入
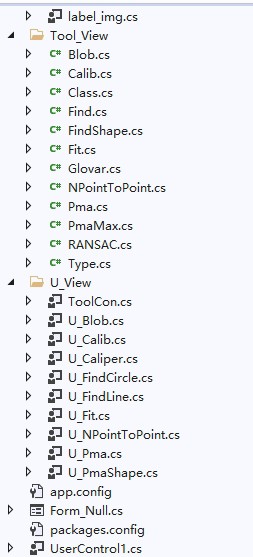
棋盘格检测建议用FindChessboardCornersSB(注意是带SB的后缀),比旧版算法快三倍还不容易翻车。尤其是想模仿VisionPro的工作流,自己折腾控件库的时候,总能在代码里找到些邪道玩法。控件拖拽用WPF的Thumb太笨重,最后用PictureBox+Mouse事件硬撸了个支持旋转缩放的ROI控件,带贝塞尔曲线手柄的那种。遇到椭圆别慌,用FitEllipse配合ROI裁剪,比硬怼
本文介绍了一种基于RV1126平台的WiFi相机流媒体中间件解决方案。该系统采用模块化设计,支持视频采集、环形缓冲、WiFi管理和多协议分发等功能。 核心架构包含: V4L2视频采集模块,支持DMABUF零拷贝 无锁环形缓冲区实现生产者-消费者模型 WiFi管理模块支持AP/STA模式 多协议服务器(RTSP/HTTP/WebRTC) 硬件加速编码(可选) 系统特点: 低延迟传输(WebRTC支持
接口隔离原则
——接口隔离原则
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 智能体开发者社区
智能体开发者社区


 AI Agent技术社区
AI Agent技术社区


 AI硬件创业社区
AI硬件创业社区


 DAMO开发者矩阵
DAMO开发者矩阵
 快递鸟社区
快递鸟社区



 HarmonyOS开发者社区
HarmonyOS开发者社区





 AtomGit开源社区
AtomGit开源社区







 openEuler 社区
openEuler 社区

 脑启社区
脑启社区

 腾讯云开发者社区
腾讯云开发者社区








 开源鸿蒙跨平台开发者社区
开源鸿蒙跨平台开发者社区