




- @ShiMetaPi
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
1)点击桌面图标进入到应用界面。备注:使用该应用时,需将开发板的 UART3 与电脑端相连。2)连接完成后,输入波特率,点击【设置波特率】将设置 UART3 的波特率,该案例以115200为例。设置成功波特率后,会弹出设置成功的弹窗提示,点击确认即可。3)电脑端打开串口调试助手,找到相应的 COM 口,根据板端设置的波特率设置电脑端串口调试助手的波特率,点击【打开】即可。4)板端应用界面点击【打开
本文介绍了为M4-R1开发板搭建OpenHarmony 5.0编译环境的详细步骤。主要通过Docker容器技术实现隔离的开发环境,提供了两种方式:使用预构建的docker镜像或自行构建镜像。重点说明了dockerfile的配置方法,包括修改软件源为华为云、安装编译依赖包、设置用户权限等。文章还详细介绍了如何通过脚本构建容器、解决网络问题、进入容器后的配置操作,以及获取OpenHarmony源码的两
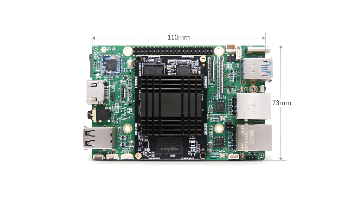
ShimetaPi M4-R1 V1.0 是一款高性能嵌入式主板,搭载 Rockchip RK3568B2 四核 Cortex-A55 处理器,主频最高 2.0GHz,支持 LPDDR4/LPDDR4X 内存,标配 4GB,并集成 ARM Mali-G52 2EE GPU,具备强大的图形处理与硬件解码能力。5)使用双公头USB线,一头连接电脑USB口,另一头接到主板OTG-usb口,按住Uboot

做 AI 摄像头这件事,最难的往往不是"AI 模型怎么训",而是"怎么让 Sensor 稳定出图、怎么让低照度画质达标、怎么让 AI 结果实时跑在端侧"。这三个问题,正是 Pico-G1 花了最多工程精力去解决的事情。全球 AI 视觉芯片市场正在快速增长,IPC 行业对"既懂嵌入式又懂 AI"的开发者需求越来越大。Pico-G1 提供了一条学习路径:从视频采集到 ISP 调优,从 AI 部署到系统
最近,知乎上一个热帖引发了技术圈的集体共鸣:《从抢着装到花 199 元请人删,为啥第一批「养虾人」已经开始卸载龙虾了?就在几个月前,OpenClaw(龙虾)凭借其强大的自动化调度能力火遍全网。无数人抱着“自建数字员工”的幻想,冲进各种教程。甚至很多连平时都不怎么会折腾电脑的人都争前恐后地花钱来请人给自己安装OpenClaw(龙虾),生怕自己和这次ai的浪潮失之交臂。但很快,这股热潮就变成了哀鸿遍野
如果你是一个喜欢捣鼓硬件的开发者,你可能对各种"能跑AI的板子"有个大概的心理价位。树莓派4B四百多,还没算摄像头和NPU——AI推理全靠CPU硬算,人脸检测个位数帧率。Jetson Nano性能够了,但千元起步,功耗7-15W,接电池基本别想。ESP32-CAM十几块钱,但那是MCU,没有Linux,没有NPU,所谓的AI基本只能推图到云端。作为一个想玩AI摄像头的人,你大概希望有这么个东西:几

OpenClaw技能包实战指南:解锁AI生产力潜能 大多数用户仅使用了OpenClaw 10%的功能潜力。本文提供了一份精选技能包安装指南,帮助用户突破"插件焦虑",将AI转化为真正的生产力工具。核心内容包括: 基础命令:安装技能商店和必备插件 办公自动化:Google全家桶、飞书集成、文档处理 开发者工具:代码管理、自动化测试 内容创作:自媒体运营全流程自动化 安全建议:权限

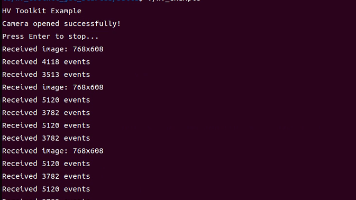
HV Toolkit 是 ShiMetaPi 推出的 专为事件相机(DVS)设计的高性能C++ SDK,支持事件数据流(EVS)和图像数据流(APS)的实时采集与处理,兼容EventCD格式,适用于高性能事件相机开发。:768×608(子采样:384×304):768×608(可调):USB 3.0高速传输:兼容EventCD/EVT2.0:C++17 或更高版本:3.10 或更高版本:图像处理与
1)点击桌面图标进入到应用界面。备注:使用该应用时,需将开发板的 UART3 与电脑端相连。2)连接完成后,输入波特率,点击【设置波特率】将设置 UART3 的波特率,该案例以115200为例。设置成功波特率后,会弹出设置成功的弹窗提示,点击确认即可。3)电脑端打开串口调试助手,找到相应的 COM 口,根据板端设置的波特率设置电脑端串口调试助手的波特率,点击【打开】即可。4)板端应用界面点击【打开
摘要:视美泰基于OpenHarmony系统和RK3588芯片NPU算力,开发了人脸识别应用案例。该方案采用双模型设计(YOLOv5检测+FaceNet特征提取),通过RKNN推理引擎实现高效人脸检测与识别。技术实现包括图像预处理、异步推理、特征向量归一化及人脸库比对等功能,提供3个NAPI接口供开发者调用。案例支持OpenHarmony 5.0.0 64位系统,已在视美泰AIoT-3588A开发板
