- @2500_94317807
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
C# 运动控制系统。雷赛运动控制卡控制系统。像高川控制卡、高川控制器、或者固高运动控制卡以及正运动控制器、正运动控制卡可以用这个框架,自己替换一下库文件等代码就可以。功能丰富,注释多,非常适合新手学习,也可以做框架。最近在搞工业自动化项目,发现很多兄弟在选运动控制卡的时候特别纠结——雷赛、固高、正运动...其实真不用那么纠结。只要找个靠谱的C#框架,管它什么牌子的控制卡,改改DLL引用就能直接跑。

C#与Halcon联合编程写的视觉几何定位与测量框架程序,内容包括几何定位方面的模板创建和查找,支持圆测量方面的圆ROI,拟合,标定和测量,还支持整个模板的保存,删除和加载,同时支持相机单帧彩图和连续彩图,这个属于Halcon在C#基础的入门课程,适合Halcon与C#联合编程的初学者。匹配成功后,记得用AffineTransContourXld做仿射变换,把模板坐标系转到当前图像位置。加载时反过

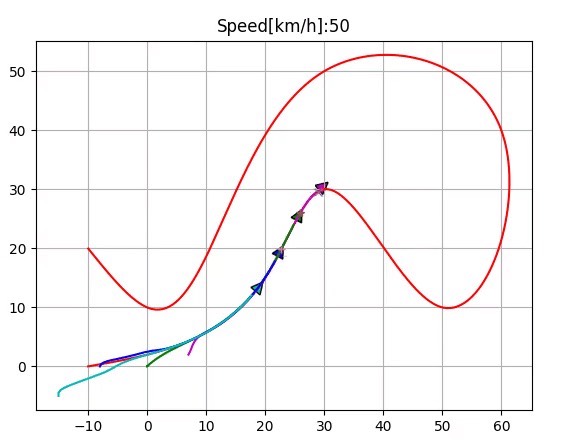
PID控制是经典方法,加上虚拟结构的概念,能让这群家伙更有组织性。举个例子,假设我们要让五个无人机排成三角形移动——这时候虚拟结构就相当于一个隐形的框架,每个无人机知道自己该占哪个角,PID负责把位置误差压到最小。跑仿真时最治愈的画面:一开始智能体们像无头苍蝇乱窜,约20秒后突然找准各自的位置,整齐划一地开始移动。(参考文献:Reynolds的boids模型、Olfati-Saber的群体控制框架
注意PHY地址要设对,我这边用的是LAN8742,硬件复位脚接的是PG14。DC同步的实现比较有意思。SOEM的dc_handler里有个校准时钟的逻辑,实测发现需要调整偏移量补偿。下次准备试试接6轴联动的效果,有兴趣的可以一起折腾。可配合汇川IS620N、三洋RS3、赛孚德ASD620B、埃斯顿ProNet、迈信EP3E、台达A2-E、伟创SD700、松下A5B/A6B和欧姆龙G5系列驱动器。不
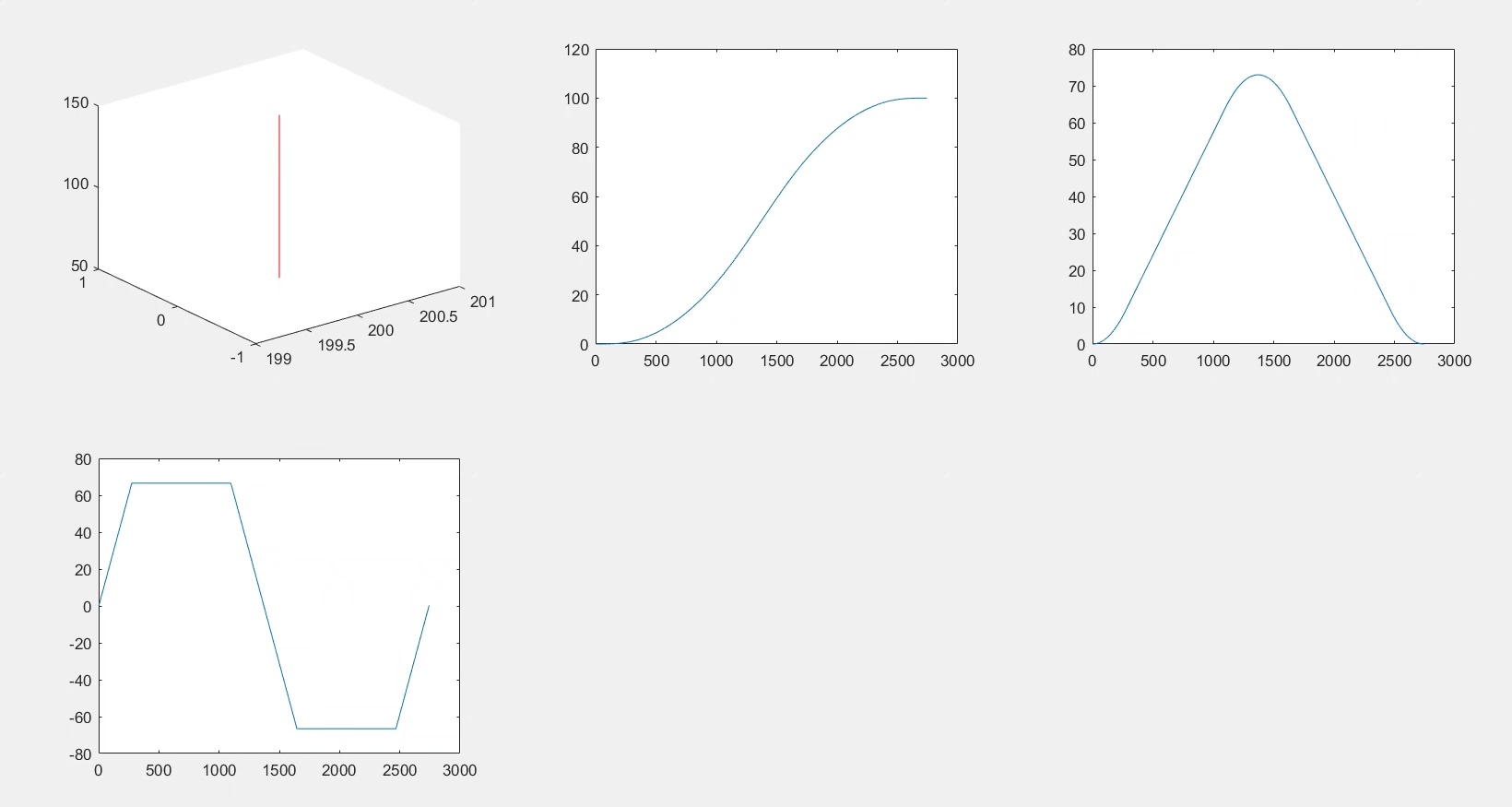
通过将简单的几何路径叠加和S形速度曲线结合起来,我们可以实现一种灵活且平滑的机器人路径规划方法。这种方法不仅适用于涂胶场景,也可以扩展到其他需要精确轨迹控制的应用中。希望这些代码和分析能够帮助大家更好地理解路径规划的基本概念和实现方法!
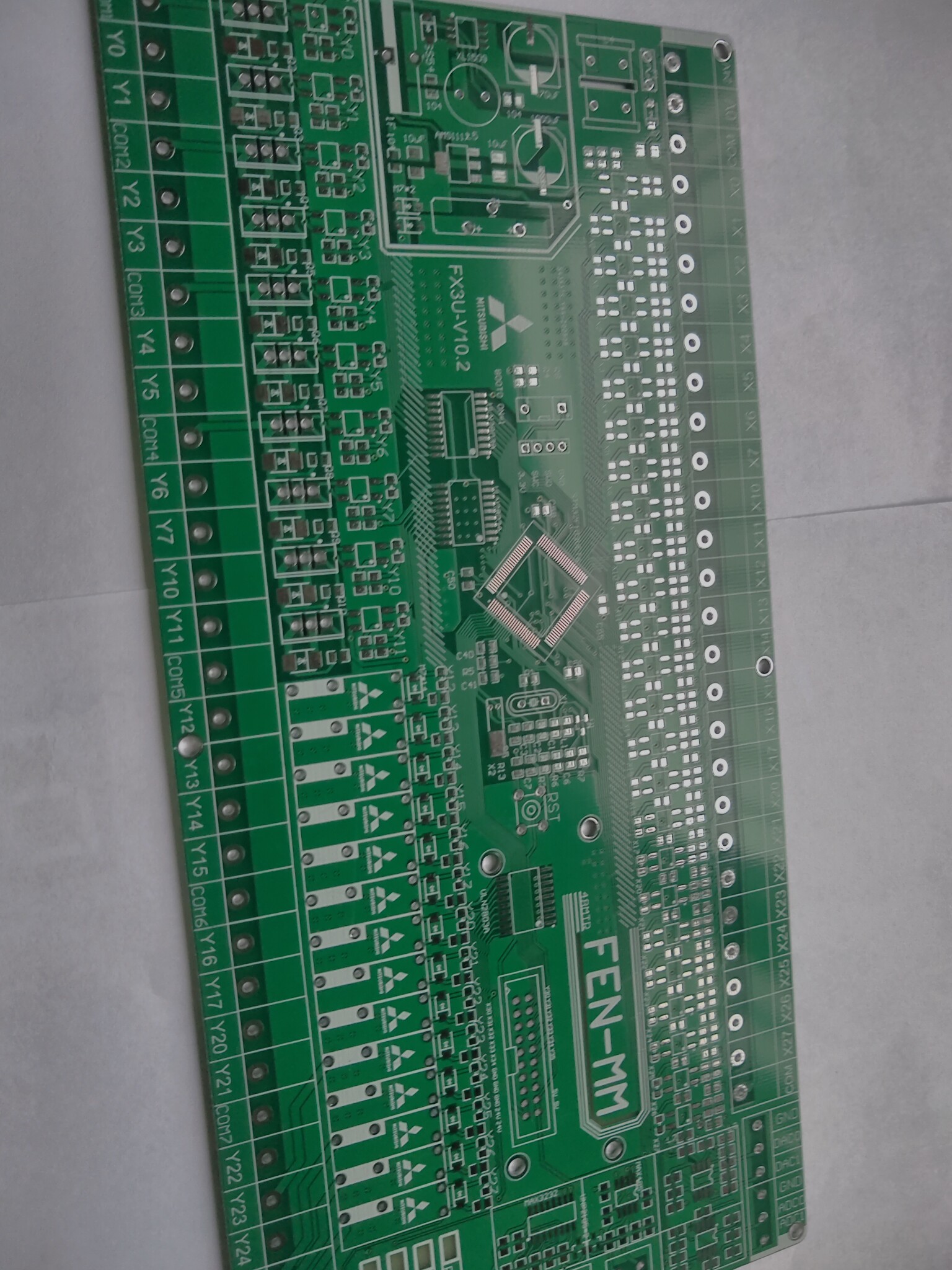
不过要注意PD和PE端口对应的继电器驱动电路,原理图上每个输出通道都配了ULN2003达林顿管,这样IO口直接就能驱动继电器线圈。实测波特率跑到115200没问题,但要注意485总线的终端电阻配置,原理图上是跳线选择的设计,现场调试时记得根据实际情况调整。这里有个小坑——源码默认用的12位精度,但实际电路前端运放是单电源供电,负电压信号需要做偏移处理。2、24路独立输出,PC817光耦隔离,继电器
这种并联腿结构看着像螃蟹腿,运动起来比想象中带劲——既能当轮子滚又能当腿蹦跶,今天主要聊聊怎么用C语言让它在地板上撒欢儿。可以通过使用键盘按键实现前进,后退,左转,右转,原地转向,抬升,降落,跳跃动作并调速,同时在运动过程中可以调节双腿高度保持平衡等功能。调试这个的时候没少翻车,扭矩给大了机器人能原地后空翻,小了又像蹲坑起不来。这么搞出来的漂移转弯特别有拉力赛感觉,转弯时内侧腿自动收缩降低重心,外

"玩过机器人跟随项目的兄弟应该都见过这种场景:几台设备嘀嘀嘀互相定位,主机实时追踪从机方位。注意那个32768的魔数——其实对应着16位有符号数的最大值,说明原厂直接用了ADC的原始数据。配套的Windows评估工具其实是个宝藏,它的3D视图用了DirectX的粒子特效,但核心算法和Linux版本同源。uwb 原厂方案,Pdoa 原来做机器人跟随功能用的,懂的人看图都懂, 带开发资料。uwb 原厂
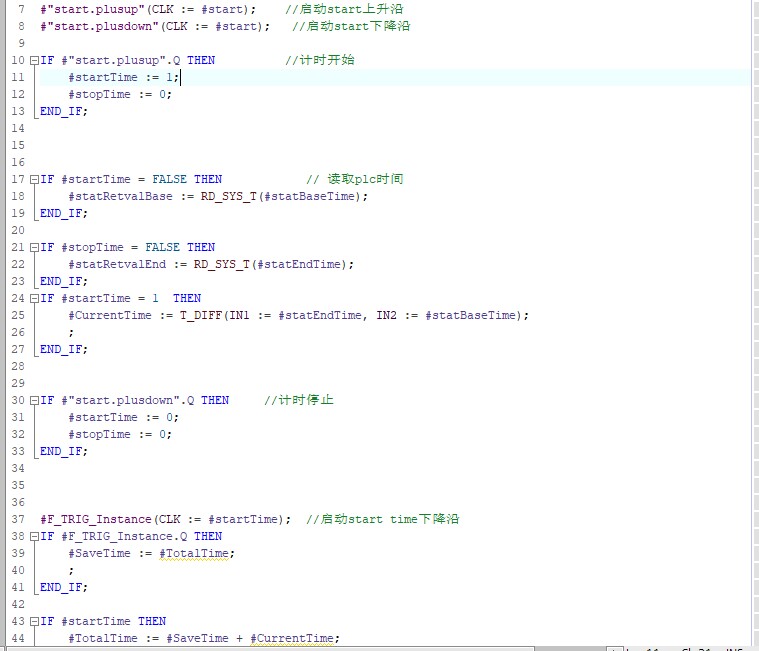
西门子PLC精确计算设备运行时间程序,1200PLC和1500PLC通用,两次读取PLC的实时时间做比较,这样就可以不算入PLC每次扫描时间,非常准确的记录设备运行时间。西门子PLC精确计算设备运行时间程序,1200PLC和1500PLC通用,两次读取PLC的实时时间做比较,这样就可以不算入PLC每次扫描时间,非常准确的记录设备运行时间。虽然西门子官方有案例,但是不好用,我进行了改良,可以非常合适
信捷PLC六轴机器人程序此套程序为触摸屏宏指令未加密版信捷PLC+威纶通触摸屏自制6轴码垛机器人,可设定码垛行数,列数,层数,示教功能,配方功能圆弧插补功能,六轴运动控制算法。脉冲转角度控制,脉冲转位置控制ST+梯形图编写,注释嘿,各位工控爱好者们!今天来和大家聊聊一套超有意思的信捷PLC六轴机器人程序,而且还是触摸屏宏指令未加密版哦,搭配威纶通触摸屏,简直是绝配。咱先说说这自制的 6 轴码垛机器