- @BiebJfMWYxfb
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
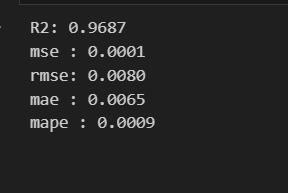
咱们今天拿单变量时间序列开刀,手把手用Python搓一个——虽然模型代码是抄的,但保证你能看懂怎么运作的。随机生成的权重固定了种子,保证结果可复现,实际用的时候可以去掉seed。这个模型也不是最近的模型,但是比较小众,用的也比较少,这也算是一个有点,特点就是运算快,2万多条数据5秒多就完事了,关键是精度还不低,真是气人,有评价指标为证。这个模型也不是最近的模型,但是比较小众,用的也比较少,这也算是
不同数据库需要对应的驱动,比如MySQL要装ODBC驱动,SQL Server建议用Native Client。今天咱们来点LabVIEW操作数据库的硬核玩法,重点拆解Access/MySQL/SQLServer三个数据库的增删改查实战。遇到坑的可以重点看连接字符串配置和驱动版本,这俩坑我帮你们踩了三年...Labview实现对Access/MySQL/SQLServer3种数据库增删改查操作,源

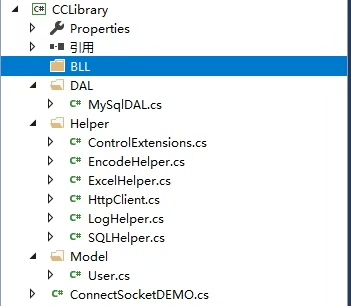
源码里还有个路径规划算法的Demo,用A*算法实现避障,虽然比不上商业系统的算法库,但理解基本原理足够用了。介绍:c#winform系统模板,包含socket连接,多线程处理demo,MySQL连接进行增删查改,日志记录功能,写法规范,有通用类可以直接调用,可用于学习。介绍:c#winform系统模板,包含socket连接,多线程处理demo,MySQL连接进行增删查改,日志记录功能,写法规范,有
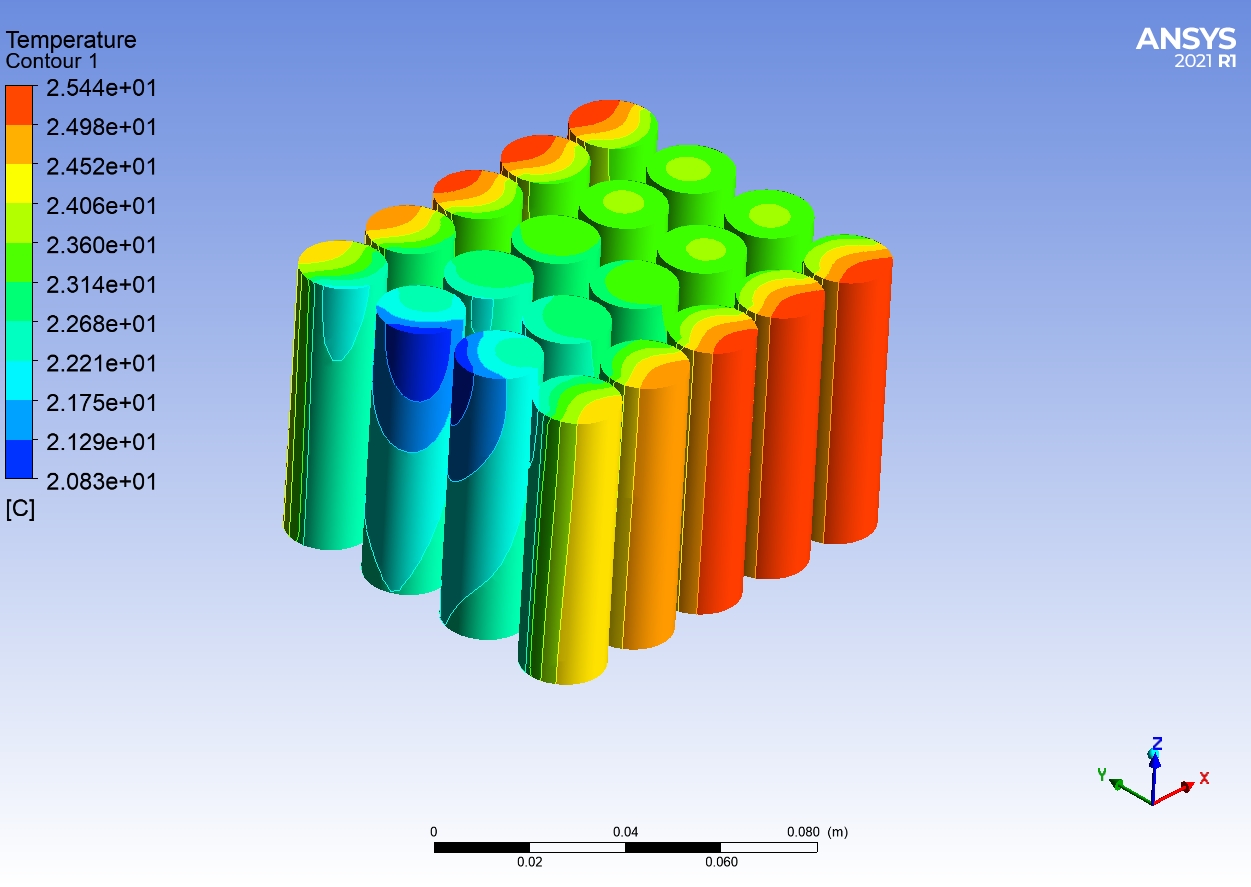
Fluent、starccm 电池、芯片等水冷风冷换热换热仿真在电子设备不断向小型化、高性能化发展的今天,电池和芯片的散热问题愈发关键。水冷和风冷作为常见的散热方式,借助 Fluent 和 StarCCM+ 等仿真软件来进行换热仿真分析,能帮助工程师们更好地优化散热设计。
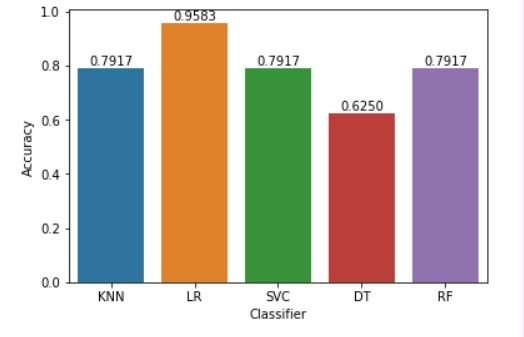
洪水内涝暴雨预测模型,其他技能服务使用Kerala洪水数据集,输入是降雨量,输出是洪水风险,基于机器学习算法预测洪水发生的可能性。该模型采用5种机器学习算法,分别是KNN分类、逻辑回归、支持向量机、决策树和随机森林,利用Kerala降雨数据进行洪水预测以获取最佳模型。考虑清楚,和arcgis那种不一样,这个偏数学建模附源码,数据以及注释python在面对洪水内涝这样的自然灾害时,提前准确预测显得尤
这个基于V-REP和Matlab的联合仿真项目,完美复现了工业现场的分拣场景——SCARA机械臂特有的水平快速移动能力,配合视觉识别系统,让物料分拣变得像抓娃娃机一样精准有趣。调试时最抓狂的是坐标系转换问题,V-REP的Z轴朝上而Matlab默认Y轴朝上,好几个小时都在和正负号较劲。流水线自动分拣机器人仿真,vrep与matlab联合仿真,基于机器视觉技术进行自动分拣,采用scara型机械臂,按照
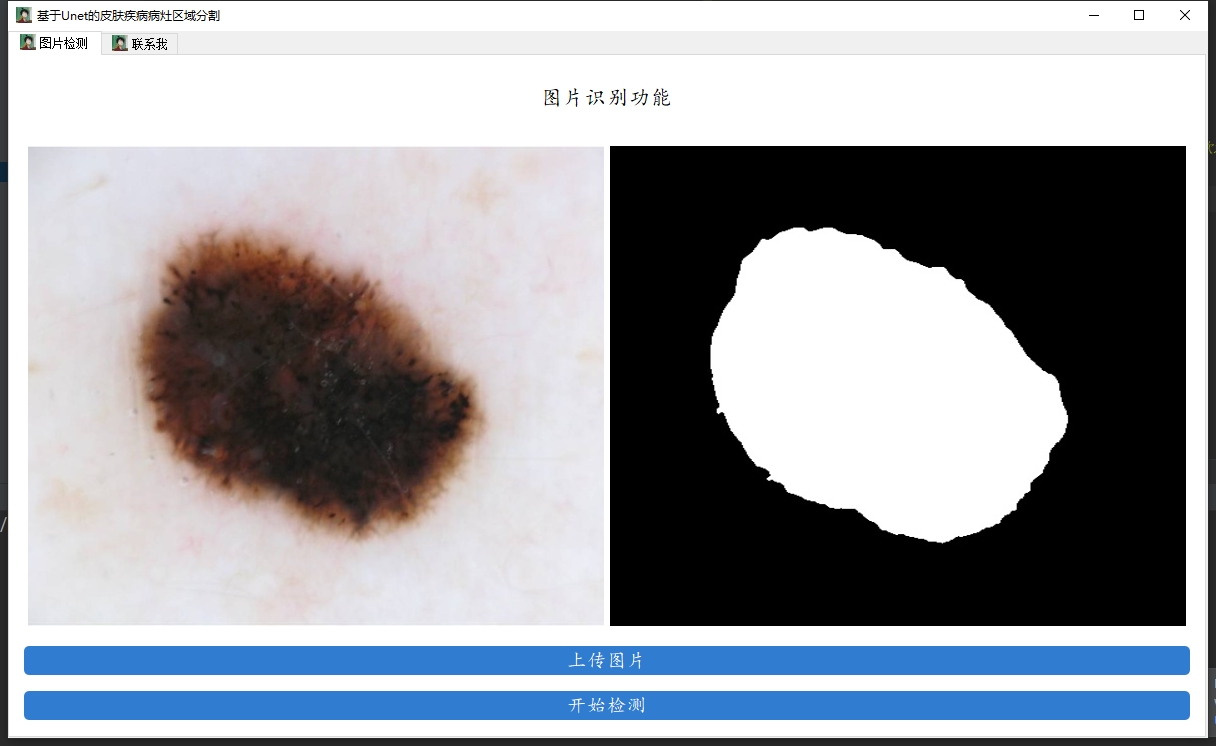
这套系统在ISIC2018数据集上能达到89%的Dice系数,但实际部署时发现对毛发的干扰比较敏感。现在回头看,医学影像项目最大的挑战不是模型本身,而是如何让模型理解哪些是真正有临床意义的特征。这里3x3卷积配合BatchNorm已经是标配,但有个细节——inplace=True参数能节省内存,实测在1080Ti上能让batch_size增大20%。这个领域最有趣的地方在于,皮肤病变边缘往往模糊不
基于STM32H750芯片和SOEM的EtherCAT主站源码 提供配套CUBE工程和。SOEM协议栈使用1.3.1版本。可配套如图所示开发板使用。支持DC同步。可配合汇川IS620N、三洋RS3、赛孚德ASD620B、埃斯顿ProNet、迈信EP3E、台达A2-E、伟创SD700、松下A5B/A6B和欧姆龙G5系列驱动器使用,或提供想适配的驱动器型号。EtherCAT作为一种高效的实时工业以太网

洪水内涝暴雨预测模型,其他技能服务使用Kerala洪水数据集,输入是降雨量,输出是洪水风险,基于机器学习算法预测洪水发生的可能性。该模型采用5种机器学习算法,分别是KNN分类、逻辑回归、支持向量机、决策树和随机森林,利用Kerala降雨数据进行洪水预测以获取最佳模型。考虑清楚,和arcgis那种不一样,这个偏数学建模附源码,数据以及注释python在面对洪水内涝这样的自然灾害时,提前准确预测显得尤
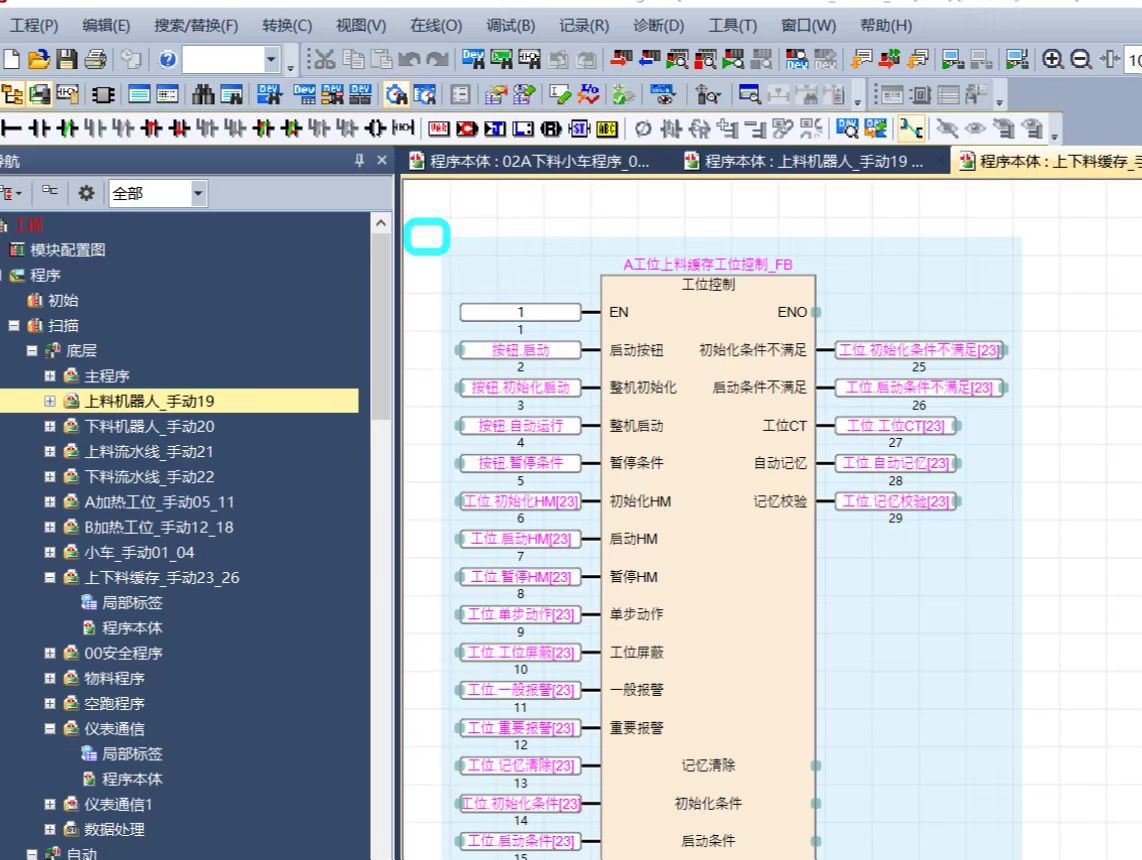
搞完这些模块,最大的心得不是技术多牛逼,而是发现好的程序结构就像乐高积木——每个功能块都能独立测试,插拔自由。来,带你们看看这套组合拳是怎么打的。三菱R系列PLC及触摸屏程序,各种标准功能块,与雅马哈机器人控制程序,含手自动程序,报警程序,模拟量程序,同步轴轴定位程序,扫码枪程序,串口485/232/TCP通信等功能块程序等。三菱R系列PLC及触摸屏程序,各种标准功能块,与雅马哈机器人控制程序,含