登录社区云,与社区用户共同成长
邀请您加入社区
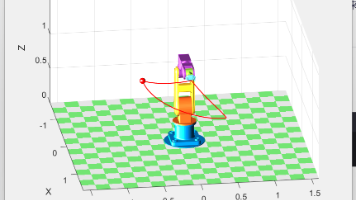
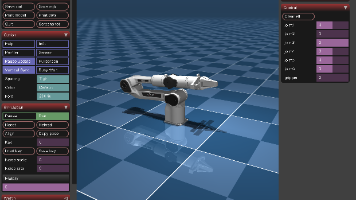
六轴可视化机械臂仿真(三维模型导入matlab)
混合物模型考虑了分散相对混合物动量的贡献,适用于体积分数更大一些的气泡流(也可以用作颗粒流),比气泡流更通用化一些;混合物模型将两相作为一种混合物,求解统一的速度场(混合物的N-S方程),分散相由滑移模型给出,求解分散相的体积分数输运方程。双欧拉模型将两相都视为独立的连续介质,彼此相互穿透,有独立的速度场,区别:气泡流模型适用于液体为连续介质、少量气泡(近似假设液体不可压,气泡通过滑移模型运行。1
求分享一个ANSYS FLUENT的24.2版本的linux版,linux系统为ubuntu 22.04 lts x86_64版本。
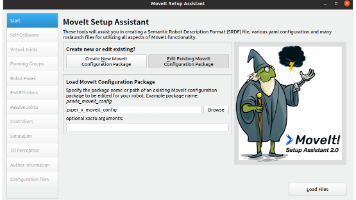
Moveit与Gazebo联合仿真。
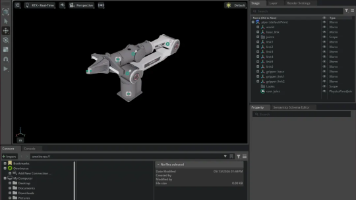
本项目是松灵 PiPER 机械臂系列的MuJoCo仿真基座项目,旨在提供松灵PiPER机械臂系列的通用Mujoco仿真环境。目前项目完成c++版本的仿真环境启动,并基于测试版ros2控制插件完成ros2对仿真机械臂的控制测试。下面将逐步指导完成但前版本的Agilex机械臂Mujoco仿真环境构建,并利用测试版ros2插件完成ros2对仿真机械臂的控制。
CAIS 2026 是人工智能(AI)与模拟仿真交叉领域的顶级国际学术盛会,旨在为全球学者、工程师及行业专家提供一个高水平的交流平台,探讨AI与仿真技术的最新研究进展、创新应用及未来趋势。所有的投稿都必须经过2-3位组委会专家审稿,经过严格的审稿之后,最终所有录用的论文将以会议论文集的形式在IEEE(ISBN:979-8-3195-0972-7)出版,见刊后由出版社提交IEEE Xplore,EI
本文设计并实现了一种基于单片机的手势识别智能控制系统。系统采用主机-从机架构,从机通过MPU6050传感器采集手势数据(上下左右方向),经蓝牙传输至主机;主机接收数据后通过LCD1602显示手势方向。硬件设计包括单片机最小系统、传感器模块、显示模块及蓝牙通信电路,软件部分实现了数据采集、处理和显示功能。仿真测试验证了系统对手势识别的准确性和实时性,为智能交互设备开发提供了可行方案。附录包含原理图、
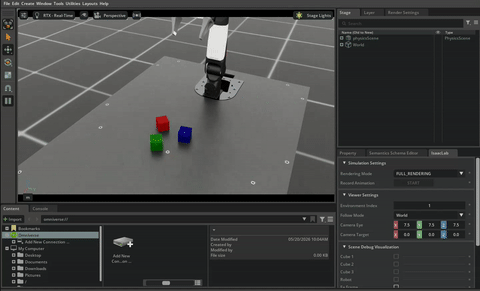
本文基于 IsaacLab 平台完成NERO机械臂方块堆叠仿真环境搭建与键盘遥操作数据采集全流程部署,适配标准化仿真开发规范,可快速实现人工遥操作采集、自动化批量采集、数据集回放校验完整闭环。方案兼容 松灵七轴机械臂NERO与松灵六轴PiPER机械臂,支持键盘多自由度精准操控,产出的 HDF5数据集贴合真实人工操作特征,有效解决仿真数据真实性低、泛化性差的问题。整体部署简单、复用性强,可直接用于机
本文完整实现了基于 IsaacLab 的 PiPER 机械臂遥操作与数据采集流程,包括:IsaacLab 外部项目搭建PiPER URDF 转 USD机械臂资产配置Stack Task 环境构建平行夹爪控制适配键盘遥操作人类演示数据采集Robomimic 训练配置相比官方 Franka 示例,本文重点解决了国产机械臂在 IsaacLab 中的兼容问题,尤其是:双夹爪 joint 控制gripper
硬件试错太昂贵?CoppeliaSim让算法验证告别“等实物”。分布式控制+多语言接口,一个仿真平台打通机械臂、移动机器人研发全流程。本文带您吃透 CoppeliaSim 核心能力与典型应用
Windows下搭建C++环境的Coppeliasim
本文详细介绍了如何使用Python和Simulink实现飞行器六自由度模型的仿真,从数学方程解析到3D动画生成的全过程。通过核心方程解析、仿真环境搭建、数值求解与动画实现等步骤,帮助读者掌握飞行器运动模型的复现技术,适用于无人机设计和飞行控制系统开发。
本文介绍了在HyperMesh中运行Python脚本的两种方法:通过菜单加载或使用Python窗口交互运行;同时提供了查找Python API帮助的两种途径:直接使用help命令或通过帮助文档查询。还指出Python API与Tcl API保持了命令名称和参数的一致性,方便用户切换。文末推荐了相关技术文章。
本文详细介绍了在Ubuntu 22.04上使用ModelSim SE 2020.4搭建PULPino RISC-V仿真环境的完整流程,包括Python2环境配置、ModelSim安装、PULP-RISCV工具链编译以及Hello World仿真的实现。特别针对常见问题如Python2兼容性、CMake -m32错误等提供了解决方案,帮助开发者高效完成RISC-V仿真环境搭建。
本文详细指导在Ubuntu 22.04上搭建PULPino RISC-V开发环境,涵盖Python2兼容性处理、Modelsim 2020.4安装及helloworld仿真实现。提供从工具链配置到项目构建的完整流程,解决常见问题,助力开发者高效掌握RISC-V架构开发。
本文详细解析了PULPino仿真过程中的常见问题及解决方案,包括Python2环境配置、Modelsim版本选择、自定义RISC-V工具链构建等关键步骤。通过实战经验分享,帮助开发者避开陷阱,顺利完成PULPino仿真环境搭建和helloworld测试。
本文详细介绍了如何利用AirSim Python API(1.3.1)从零构建自动驾驶小车仿真项目,涵盖环境配置、工程化代码设计、传感器数据处理、控制算法集成等关键步骤。通过模块化架构和实战技巧,帮助开发者将简单的Demo转化为完整的仿真系统,提升自动驾驶算法的开发效率。
本文深入探讨了Coppeliasim仿真中B0 Remote API的Python高效联动方法。通过对比旧版API,详细解析了B0-based remote API在功能丰富性、代码简洁性和多机控制方面的核心优势,并提供了从旧版迁移到新版的具体步骤和实战案例,帮助开发者提升机器人仿真效率。
1、https://github.com/PRBonn/agribot2、https://github.com/ros-mobile-robots/diffbot
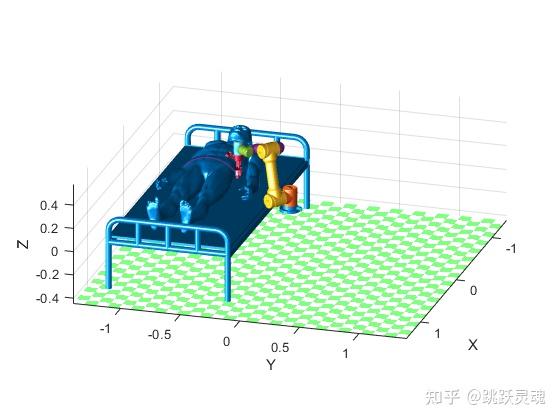
Matlab机器人工具箱7——搬运动画展示
具身智能仿真
机器人系统常用仿真软件介绍和效果1 主要介绍以下七种仿真平台(侧重移动机器人仿真而非机械臂等工业机器人仿真): 1.1 USARSim-Unified System for Automation and Robot Simulation USARSim是一个基于虚拟竞技场引擎设计高保真多机器人环境仿真平台。主要针对地面机器人,可以被用于研究和教学,除此之外,U
之前跟着古月居的博客一步一步学ROS,发现可能大神写的博客很早了,然后代码有些版本存在问题.所以LZ要自己在记录下.环境为Ubuntu14.04+ros indigo.参开书籍:ROS by ExampleLZ假设小伙伴已经安装成功ROS indigo的版本.1.检查环境并安装依赖cd ~wget https://raw.githubusercontent.com/pirobo...
转自:http://blog.csdn.net/ZhangRelay/article/details/425864911 主要介绍以下七种仿真平台(侧重移动机器人仿真而非机械臂等工业机器人仿真): 1.1 USARSim-Unified System for Automation and Robot Simulation USARSim是一个基于虚拟竞技场引擎设计高保真多
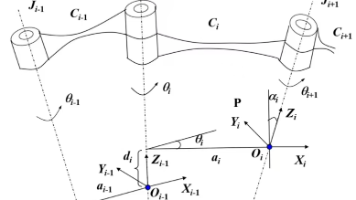
Matlab机器人工具箱使用2 DH建模与加载模型
已知r是地球半径, h1, h2是天线高度,求AD距离图中AD距离Distanced1d2,d1d1rh12−r2d12rh1h12h1h12d12rh1d2d1ADd1d22rh12rh2d1d22rh1h2)r6371000mD≈。
嵌入式开发神器Velxio:浏览器仿真,零硬件门槛!这款开源工具支持Arduino、ESP32等主流开发板,无需安装IDE或购买硬件,直接在网页中搭建电路、调试代码。40+外设全仿真,支持多板联动,实时串口输出,与真机体验无异。新手避免烧板风险,老手提升调试效率,还支持本地部署保障隐私。提供在线版和GitHub开源版本,自带丰富示例,5分钟快速上手。Velxio解决了嵌入式开发中最劝退的硬件门槛问
CAE高级工程师7 人赞同了该文章是一款 GPL 许可的基于的多物理场求解器。它包括流体动力学、结构力学、电磁学、传热学、声学等模块。该项目包括一个(ElmerGUI),能够导入各种文件格式的网格、设置 PDE 系统以及导出模型数据和结果。后处理是通过 Paraview 完成的。项目以有限元法 (FEM) 的偏微分方程 (PDE) 数值求解为中心。因此,它涵盖了从热机械到电磁学的众多应用。
搞定了第八章的机器人建模,本章节尝试采用之前介绍过的gazebo让机器人在仿真环境中动起来。有不明白的地方欢迎加小鱼微信和小鱼一起沟通,快点开始你的升级打怪之路吧~通过本章节的学习,你将有以下收获~
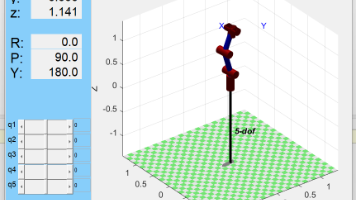
Matlab机器人工具箱使用3 模型展示、视图调整与正逆解计算
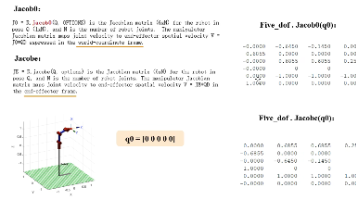
Matlab机器人工具箱8——雅可比
Altair 的制造行业分析解决方案致力于简化企业运营,强化预测性维护能力,并协助团队获取实时洞察,从而推动创新,加速智能制造转型进程。
仿真
——仿真
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 深开鸿 技术专区
深开鸿 技术专区
 openEuler 社区
openEuler 社区
 AI编程社区
AI编程社区

 全球具身智能开发者社区
全球具身智能开发者社区

 亚马逊云科技技术品牌专区
亚马逊云科技技术品牌专区

 AI硬件创业社区
AI硬件创业社区

 AMD开发者中国社区
AMD开发者中国社区

 DAMO开发者矩阵
DAMO开发者矩阵
 AI Agent技术社区
AI Agent技术社区