- @msq19895070
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
SpireCV-Pro 是一个专为智能无人系统、移动机器人和边缘 AI 设备打造的实时感知开发平台。它不是单纯把算法模型封装成 SDK,而是把相机、视频流、激光雷达、目标检测、分割、跟踪、吊舱控制、结果可视化、视频保存、推流、ROS2 转发、评估与数据迭代等能力,拆解成可以多平台(工作站、NX、瑞芯微、昇腾)自由组合的节点,让开发者像搭积木一样构建自己的感知工作流。。

SpireCV-Pro 是一个专为智能无人系统、移动机器人和边缘 AI 设备打造的实时感知开发平台。它不是单纯把算法模型封装成 SDK,而是把相机、视频流、激光雷达、目标检测、分割、跟踪、吊舱控制、结果可视化、视频保存、推流、ROS2 转发、评估与数据迭代等能力,拆解成可以多平台(工作站、NX、瑞芯微、昇腾)自由组合的节点,让开发者像搭积木一样构建自己的感知工作流。。
SpireCV-Pro 是一个专为智能无人系统、移动机器人和边缘 AI 设备打造的实时感知开发平台。它不是单纯把算法模型封装成 SDK,而是把相机、视频流、激光雷达、目标检测、分割、跟踪、吊舱控制、结果可视化、视频保存、推流、ROS2 转发、评估与数据迭代等能力,拆解成可以多平台(工作站、NX、瑞芯微、昇腾)自由组合的节点,让开发者像搭积木一样构建自己的感知工作流。。
结合FlyCore的硬件架构来看,RK3588具备本地计算能力,LQ-10可以提供飞控数据链路,MAVLink 提供标准化通信协议,再加上浏览器作为交互入口,就可以形成一套开发效率较高、调试路径清晰、后续扩展也比较方便的方案。过去要做一套无人机地面站,往往需要把前端界面、后端服务、通信协议、部署调试一项项打通:界面要设计,飞控数据要解析,指令链路要验证,最后还要部署到机载计算机或地面端设备上反复测

它的快速增长背后,释放出一个非常明确的信号:AI在编程领域的价值,已经不再是“辅助写几行代码”,而是正在带来生产力的结构性变化。设计师只需要输入UI设计需求,例如:“无人机地面控制端,需包含飞行参数显示、航线规划、图像实时传输、故障报警四大模块,风格简洁专业,适配电脑端与平板端。我们会将客户的无人机或机器人需求直接输入AI大模型,例如工业巡检无人机的续航要求、负载能力、飞行精度,或服务机器人的运动

在持续探索无人机极限空间飞行的研究过程中,法国洛林大学与Inria联合团队近期发布了其阶段性成果。2025年6月,他们在Nature子刊《npj Robotics》发表论文Flying in Air Ducts,提出一套融合气动力感知与神经网络定位的轻型飞行系统,成功实现一架18厘米微型四旋翼在直径仅35厘米的通风管中自主飞行。该系统集成了风管内气动建模、ToF-IMU融合感知与神经网络定位,突破
该平台基于PX4开源飞控固件和ROS1/ROS2机器人操作系统开发、目前已集成控制、规划、集群、激光SLAM及SpireCV等模块,支持多平台仿真引擎(Windows、Ubuntu),支持地面站人机交互,提供更容易上手的开发体验,不仅能够更好地承接飞控开发与算法验证任务,也能为后续功能迭代、实验复现和研究推进提供更顺畅的系统支撑。平台裸机重量控制在6.5kg以内,空载续航可达40分钟以上,在保证飞

该平台基于PX4开源飞控固件和ROS1/ROS2机器人操作系统开发、目前已集成控制、规划、集群、激光SLAM及SpireCV等模块,支持多平台仿真引擎(Windows、Ubuntu),支持地面站人机交互,提供更容易上手的开发体验,不仅能够更好地承接飞控开发与算法验证任务,也能为后续功能迭代、实验复现和研究推进提供更顺畅的系统支撑。平台裸机重量控制在6.5kg以内,空载续航可达40分钟以上,在保证飞
详解多旋翼无人机上的传感器技术(下)按:本文作者YY硕,来自大疆工程师。本文来自雷锋网,一个很不错的资讯网站雷锋网连接在此 http://www.leiphone.com/ 强烈推荐雷锋网,本文转载于雷锋网,特此说明,想雷锋网致敬!背景:2014年的六月,我在知乎“民用小型无人机的销售现状和前景怎么样?- YY硕的回答”这个问题下面发布了一篇科普
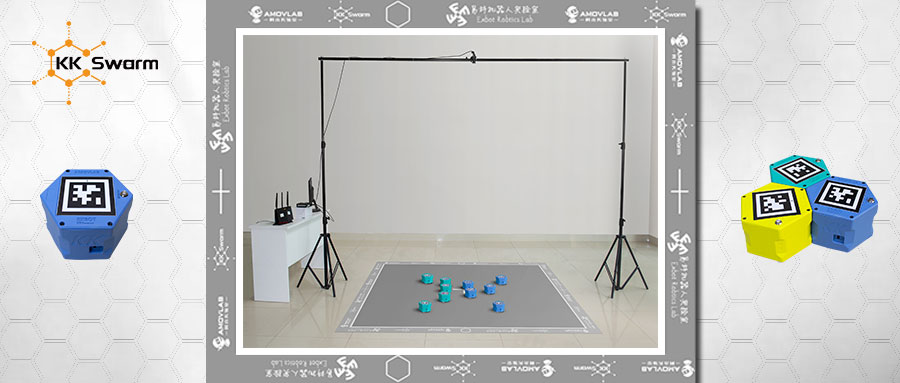
开源机器人集群项目KKSwarm,由易科机器人实验室和阿木实验室联合匠心打造。