




- @SYNKROTRON
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
自从OpenSIL项目发布后,陆续收到不少小伙伴的支持,这篇文章便来自小伙伴@刘林杰,他在知乎也有自己的专栏,见文末链接,大家可以去观摩观摩。

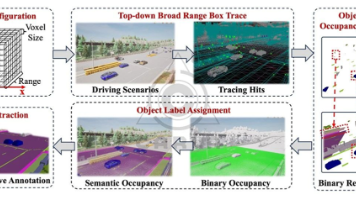
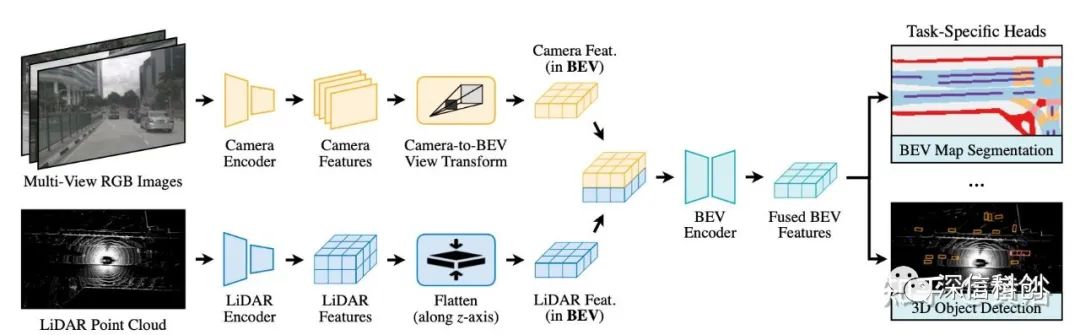
当单车感知遇到遮挡和距离限制时,车对车协同如何实现更完整的3D场景理解?如何利用CARLA仿真环境,突破传统LiDAR标注的稀疏性瓶颈?
公司基于人工智能、软件测试、数字孪生与大数据等技术,致力于自动驾驶工具链的研发,拥有一支高素质的研发团队,研发了国际领先的自动驾驶仿真及数据闭环工具链SYNKROTRON™ Oasis产品系列,能够提供高精度传感器模型、动力学模型及感知级交通环境仿真解决方案等,客户可以在仿真平台上对自动驾驶系统开展大规模的仿真测试和模型训练,提前识别自动驾驶系统缺陷、降低实车测试成本、消除场景端落地的安全隐患,加
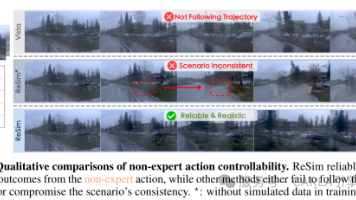
ReSim通过整合真实人类驾驶日志与 CARLA 模拟器中收集的非专家行为数据,构建可控的高保真视频生成模型,实现对各类驾驶行为(包括越界、碰撞等危险行为)的可靠模拟。
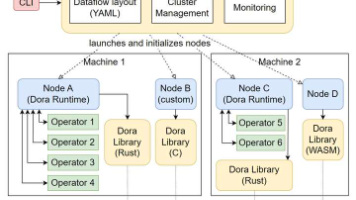
公司自主研发的OASIS产品系列,覆盖从数据采集、回灌、场景重建、到数据合成的全流程,有效助力客户提升研发效率、降低训练与测试成本,加速智能技术落地。无论是废纺智能分拣,还是智能座舱自动化测试,Oasis BotStream 平台均实现从虚拟到现实的高效迁移,让机器人能安全、低成本地开展训练与验证,同时显著提升任务执行的准确性与适应性。长期以来,ROS(机器人操作系统)是机器人研发的主流工具,为开
北极雄芯专注于Chiplet领域,独创异构集成的新型设计理念,从芯片架构底层将各场景需求中的通用模块与专用模块解耦,分别设计制造小芯粒并集成,可支持不同制程模块的互联,支持全国产封装供应链,有效提升了自主可控率,并解决了下游客户在算法适配、迭代周期、算力利用率、算力成本等各方面难以平衡的核心痛。灵猴机器人则负责高精度立柱机器人及折腿轮式人形机器人的生产制造,为项目提供最基础的“身体骨架与运动系统”
“人工智能百人会”(简称:AI百人会)是由有关高校、企业等人工智能领域知名人士发起成立的非官方、非营利性合作交流平台,旨在更好地集聚学界、产业界人工智能领域高端人才,推进多领域融合和协同创新,成为安徽大力发展人工智能产业的智库。

公司自主研发的OASIS产品系列,覆盖从数据采集、回灌、场景重建、到数据合成的全流程,有效助力客户提升研发效率、降低训练与测试成本,加速智能技术落地。无论是废纺智能分拣,还是智能座舱自动化测试,Oasis BotStream 平台均实现从虚拟到现实的高效迁移,让机器人能安全、低成本地开展训练与验证,同时显著提升任务执行的准确性与适应性。长期以来,ROS(机器人操作系统)是机器人研发的主流工具,为开
我们基于2025年秋招季最新动态,分析了覆盖全国13个省份的176条CARLA相关招聘数据(含校招、实习和社招),想给正在找工作的你一些实用建议。

国家智能网联汽车创新中心重磅推出“智驾视界”直播讲堂,主题围绕“智能网联汽车”与“车路云一体化”,邀您深入了解智能网联汽车前沿技术与行业热点。《基于路口交通流场景的合成数据技术应用》专题直播,分享了车路云一体化发展现状、路口交通流轨迹数据集构建、AI与对抗交通流模型训练、仿真工具链开发等内容。
