




- @m0_56661101
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
Fork项目的仓库到自己仓库,记得是对应要贡献的分支。转到 GitHub 上您要贡献的存储库,然后单击页面右上角的“Fork”按钮。这将在您的 GitHub 帐户中创建存储库的副本。克隆存储库:创建存储库后,您需要将其克隆到本地计算机。为此,请导航到 GitHub 上的分叉存储库,然后单击“克隆或下载”按钮。复制提供的 URL。打开终端或命令提示符并导航到要克隆存储库的目录。

这篇论文介绍了一种名为ORBIT的机器人学习统一模块化框架,使用了NVIDIA Isaac Sim技术。该框架提供了模块化设计,可轻松高效地创建具有逼真场景和高保真刚性和可变形物体模拟的机器人环境。作者们还提供了一系列不同难度的基准任务,从单阶段的柜门打开和布料折叠到多阶段任务如房间重组。为了支持不同的观测和动作空间,他们包括了具有不同物理传感器和运动生成器的固定臂和移动机械臂。ORBIT利用基于
默认情况下,所有ROS 2节点都使用领域ID 0,但为了避免来自不同组计算机上运行的ROS 2节点之间的干扰,建议为每个组设置不同的领域ID。ROS 2的正常运行依赖于工作区(Workspace)的概念,这是ROS 2的核心术语,用于定义开发ROS 2应用程序的位置。: 这表示软件源中的组件,指定了软件源包含的软件包的主要部分。脚本,该脚本会查找已安装的ROS软件包,并构建它们之间的依赖关系,然后
1、PID算法理论1.1、算法介绍PID,就是对输入偏差进行比例积分微分运算,运算的叠加结果去控制执行机构。utKpetTi1∫0tetdtTddtdet它由三部分组成:P 就是比例,就是输入偏差乘以一个系数;I 就是积分,就是对输入偏差进行积分运算;D 就是微分,对输入偏差进行微分运算。如下图所示就是一个基本的PID控制器:1.1.1、比例部分比例部分的数学式表示是:Kp∗et。
Makerbase CANable usb转can模块 can调试助手 can总线分析仪中心板分供电与CAN线测试内容:Makebase的usb转can模块 进行can通讯控制电机和读取数据ubuntu ROS C++脚本控制电机案例:广东工业大学https://github.com/rm-controls/rm_usb2can/blob/main/README_CN.md项目地址:了解MilkT
正向运动学探究的是已知关节角θi\theta_iθi,求解工具坐标系H\{H\}H或WorldP^{World}PWorldP的问题。而逆向运动学则是探究已知工具坐标系H\{H\}H的位置和姿态或WorldP^{World}PWorldP,求解满足要求的θi\theta_iθi的问题。运动学方程解的有无定义了工作空间,有解则表示机械臂能到达这个目标点,无解则表示机械臂无法到达这个点,这个目标点
这个系列的文章是笔者在自学ROS的过程中的记录,由于装双系统切换比较麻烦,笔者采用了虚拟机的办法。
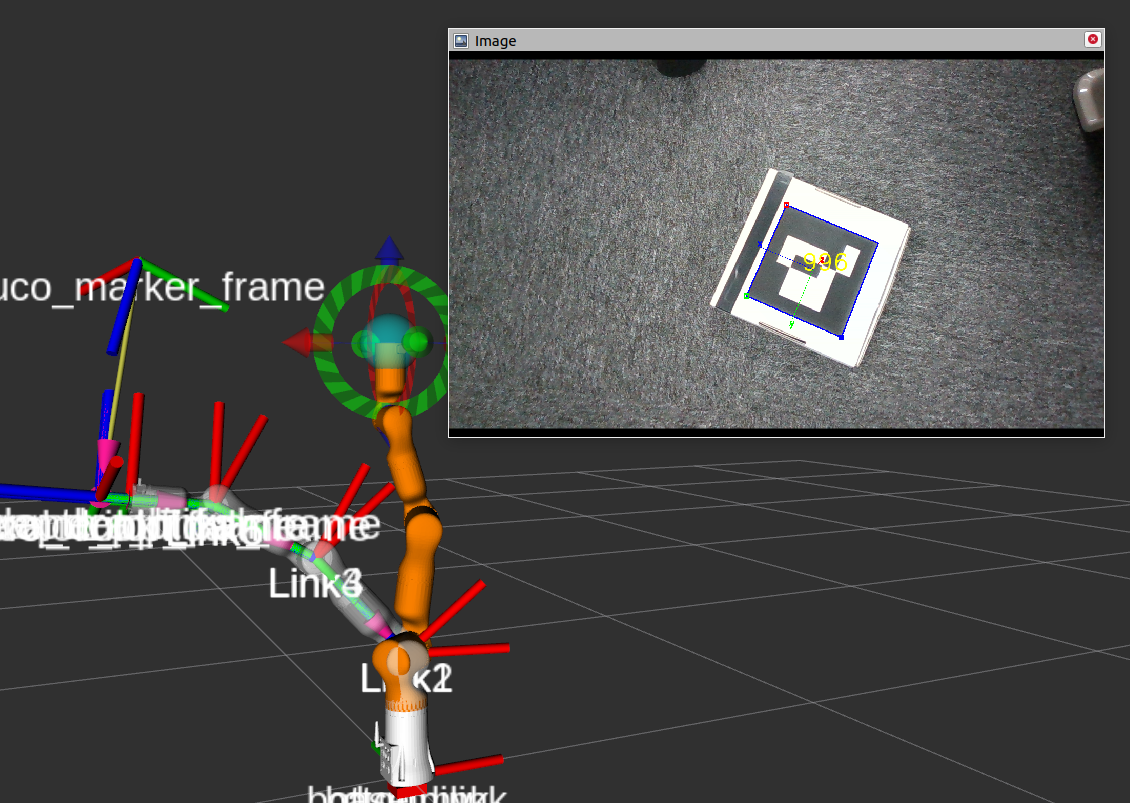
机械臂手眼标定详解作者: Herman Ye @Auromix测试环境: Ubuntu20.04 、ROS1 Noetic、Realsense D415更新日期: 2023/12/11注1:@Auromix 是一个机器人爱好者开源组织。注2: 由于笔者水平有限,以下内容可能存在事实性错误。注3: 本文中直接引用各包官方文档的图片等内容,版权归各官方所有。准备阶段为手眼标定准备以下部分:机械臂准备好
V1.02023/08/08本文内容中的硬件由 @Galbot 提供支持。是一个机器人爱好者开源组织。本文在更新日期经过测试,确认有效。

Moveit的使用、配置和原理相关的内容较多,特别是assistant生成的包,内容较多,在配置时容易让用户搞不清关系,导致配置过程艰难、漫长。同时互联网的Moveit文档较为杂乱,配置方法也有区别,因此笔者在学习过程中梳理出了Moveit的使用、配置和原理教程,希望对后来人有所帮助。提示: 本篇文章字数约94000字,阅读时间超2h,建议收藏作为moveit工具书来查阅使用。作者: Herman
