- @qq_27865227
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
核心的时间同步代码就三行判断microros是否已经同步时间rmw_uros_sync_session 同步时间rmw_uros_epoch_millis 获取当前时间本节我们通过三个API完成了MicroROS时间同步功能的开发,最终并将当前时间在OLED上显示出来,但使用有线的方式过于麻烦,下一节我们尝试通过无线WIFI完成时间的同步与MicroROS的通信开发。

了解完话题,下一节小鱼就会带大家来动手写一写话题通信代码。

鱼香快报-特斯拉机器人开始招聘了。据外媒报道,美国当地时间周二,电动汽车制造商特斯拉在其招聘页面上发布了与特斯拉人形机器人(Tesla Bot)项目相关的诸多新岗位。这些工作绝大多数都在加州,除了一个位于得克萨斯州奥斯汀。特斯拉还发布了许多2022年夏天的实习职位,移动机器人方面的相关岗位包括自主性、软件工程、控制工程、固件工程和电气工程等。碰撞检测与运动规划大家好,我是小鱼,很早之前发过关于碰撞
MCPWM中文名是电机控制脉宽调制器 (Motor Control Pulse Width Modulator ),是一款多功能 PWM 发生器,包含各种子模块,使其成为电机控制、数字电源等电力电子应用的关键元件。数字电机控制,例如有刷/无刷直流电机、RC 伺服电机基于开关模式的数字电源转换功率DAC,其中占空比相当于DAC模拟值计算外部脉冲宽度,并将其转换为其他模拟值,如速度、距离为磁场定向控制

ROS 2提供了丰富多样的服务质量(QoS)策略,允许您调整节点之间的通信。通过正确设置一组QoS策略,ROS 2可以像TCP一样可靠,也可以像UDP一样尽力而为,在其中有许多可能的状态。与ROS 1不同,ROS 2不仅主要支持TCP,还受益于底层DDS传输的灵活性,适用于有丢包的无线网络环境,其中“尽力而为 best effort”的策略更适合,或者在实时计算系统中需要满足截止时间的正确QoS配
ROS2机器人从入门到实战获取完整教程及配套资料代码,请关注公众号获取两驱版四驱版为方便交流,搭建了机器人技术问答社区:地址因为C++无法在jupyter中直接运行,所以小鱼将C++TF相关的代码放到这里,有需要的同学自取。//声明&初始化发布者。

上一节我们对ROS2的基本概念、构建工具以及采用Python和C++调用ROS2的客户端库完成了节点的编写。本节我们将重心放回节点和节点之间的数据传递上来,因为ROS2给我们带来的最大便利除了调试工具就是通信机制上了。同样的,本章的内容也分为三部分。基础篇,主要介绍通信的原理以及编程语言的一些特性,这些其实属于计算机的基础部分知识,但在学校里可能又很难学到的部分。入门篇,该篇主要分为话题通信、服务

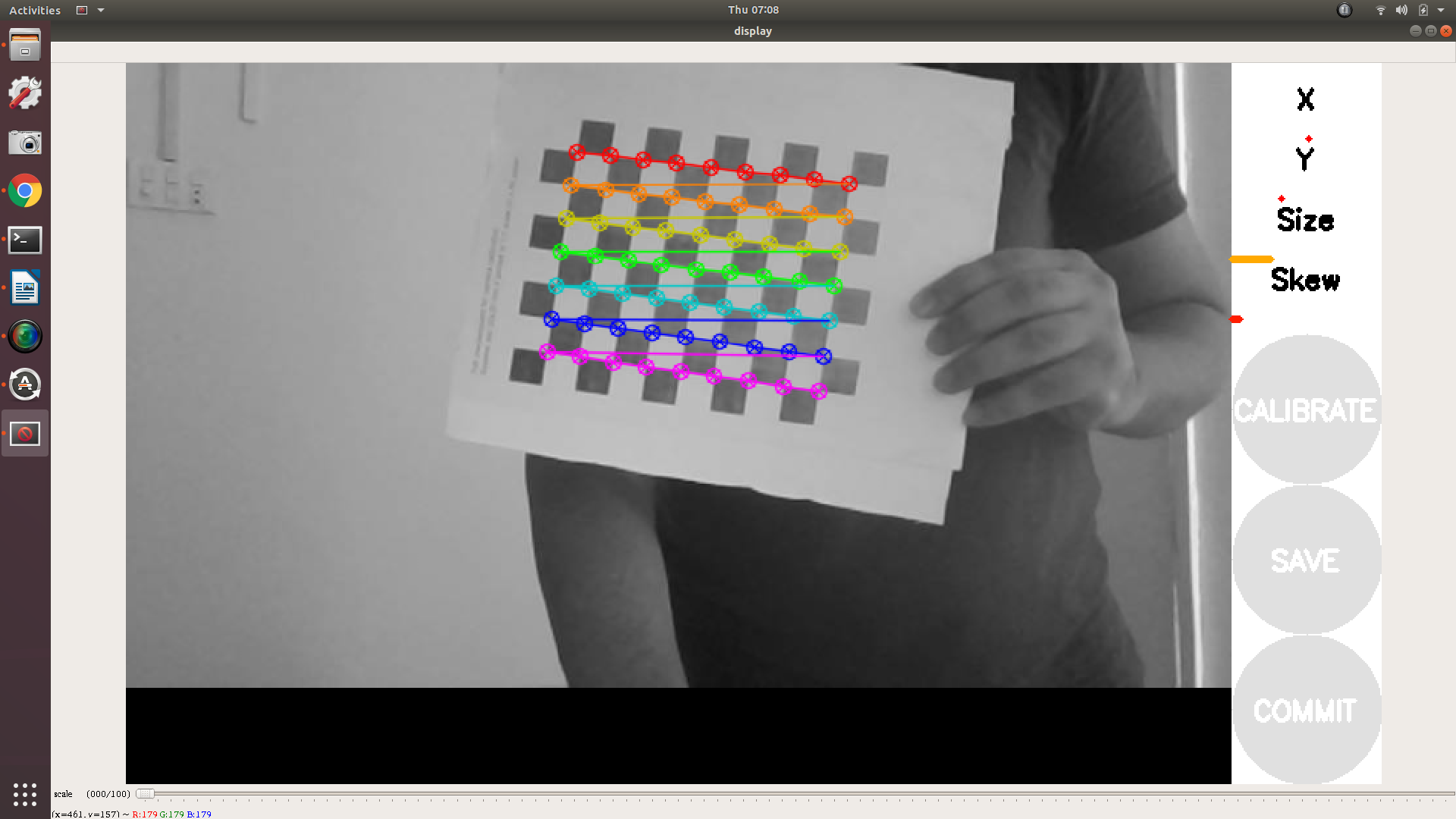
手把手教你完成基于ROS2的相机标定,本文来自——Nav2中文网/基础教程/相机标定
《动手学ROS2》10.3 SLAM技术概述本系列教程作者:小鱼公众号:鱼香ROSQQ交流群:139707339教学视频地址:小鱼的B站完整文档地址:鱼香ROS官网版权声明:如非允许禁止转载与商业用途。10.3 SLAM技术概述小伙伴们好,上一节我们搭建好了Gazebo中的仿真环境,本节课我们一起来了解一下SLAM技术。第一节中我们知道,要解决机器人自主导航问题就需要有感知(建图和定位)参与,通过
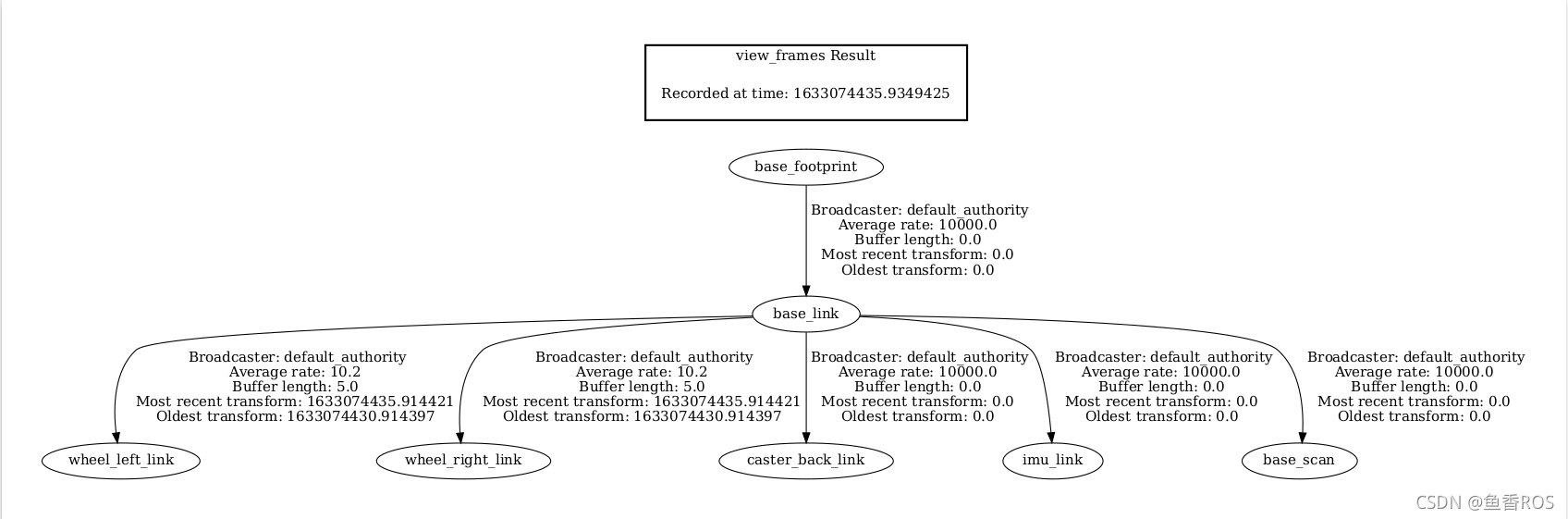
大家好,我是小鱼,欢迎关注小鱼的个人微信公众号《鱼香ROS》,每天获取机器人技术学习新姿势!在ROS2中我们如何才能看到tf树呢?这里就需要一个工具了,默认安装ROS2的时候已经安装了的,没有安装的可以使用下面这个命令行安装sudo apt install ros-foxy-tf2-tools接着我们就可以使用这个工具来可视化ROS2的tf树ros2 run tf2_tools view_fram