- @sheziqiong
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文设计并实现了一种基于单片机的手势识别智能控制系统。系统采用主机-从机架构,从机通过MPU6050传感器采集手势数据(上下左右方向),经蓝牙传输至主机;主机接收数据后通过LCD1602显示手势方向。硬件设计包括单片机最小系统、传感器模块、显示模块及蓝牙通信电路,软件部分实现了数据采集、处理和显示功能。仿真测试验证了系统对手势识别的准确性和实时性,为智能交互设备开发提供了可行方案。附录包含原理图、

摘要:本文设计并实现了一套基于Java技术栈的资产管理系统,采用Spring Boot+Vue前后端分离架构,解决了传统资产管理中效率低、追踪难等问题。系统包含用户管理、资产信息管理、流程管理和数据统计四大模块,支持资产全生命周期可视化管控。通过MySQL数据库存储数据,结合SSM框架和Vue技术,实现了功能完善、操作便捷的管理平台。系统测试表明,在安全性、响应速度和并发处理等方面均达到预期目标,
一、毕业设计(论文)内容及要求(包括原始数据、技术要求、达到的指标和应做的实验等)搬运货物的智能物流机器人机械结构设计与分析。

同时,论文还总结了本研究的主要贡献和创新点,为后续的研究工作提供了有益的参考和借鉴。第二章为相关技术介绍,详细阐述了深度学习、CNN、LSTM-Attention以及电子邮件分类等相关技术的基本原理和应用场景,为后续的系统设计和实现提供了理论支持。通过以上的组织安排,本文系统地介绍了基于深度学习的电子邮件分类系统的设计与实现过程,为读者提供了清晰的研究思路和完整的研究内容。第五章为结论与展望,总结
本文设计了一种基于STC15W4K56S4单片机的6自由度双足步行机器人系统。研究对比了主控芯片选用方案,选择运算速度更快的STC15单片机。硬件设计采用舵机驱动方案,构建包含踝关节、膝关节和髋关节的6自由度机械结构,并设计了稳压驱动模块。软件部分实现步态规划与控制算法,将行走过程分解为双脚支撑和单脚支撑两个阶段,通过PWM波控制舵机角度。系统调试结果表明,该机器人能够实现稳定的双足行走功能。研究
摘要:本文针对辣椒人工采摘效率低、成本高等问题,设计了一种辣椒采摘机器人。研究内容包括机械结构设计、采摘手臂优化、安全防护等关键技术,采用理论分析、三维建模和运动学仿真等方法进行系统开发。通过优化采摘爪、夹紧力调节等部件,提高采摘效率和作业稳定性。该设计可24小时连续作业,降低劳动成本,推动农业现代化发展。研究参考了草莓、圣女果等采摘机器人的相关文献,结合辣椒种植特点进行创新设计,为农业自动化采摘

曾鸿等通过研究发现,在当前大数据和云计算等技术的加持下,通过爬虫技术去收集相关明星的数据,可以更好地发现他们的兴趣共同特征,进而在其关注的用户中分析比对与之相对应的用户,通过精准的个性化推算让微博等产品有更好的用户体验,增进用户的黏性[4].在国外研究人员致力于整合多个数据源,包括电商平台数据、社交媒体数据和第三方数据,进行联合分析,以获得更全面的洞察和决策支持。现下,电商企业需把握大数据时代提供

学院智能制造学院专业机械设计制造及其自动化。论文(设计)题目:铝铸件打磨机器人视觉系统设计。一、毕业论文(设计)应完成的内容及要求。本科毕业论文(设计)任务书。
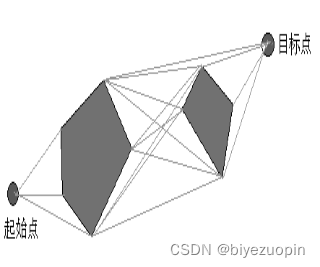
环境建模是机器人路径规划的重要环节,采取何种规划方法建模由环境信息的完备程度以及环境模型的形式决定,比如,机器人所处环境中障碍物的几何特点、大小、数量等都是考虑的因素。环境建模是实现物理空间到算法处理抽象空间的一个映射,路径搜索的结果,通常是以环境模型的方式表达。本课题对已知的全局静态环境进行场景建模的基础上,重点研究了用于机器人全局路径规划的智能粒子群算法,为机器人寻找一条从给定的起始点到目标点
本文针对微博平台谣言快速传播的问题,提出基于深度学习的谣言检测方法。研究采用新浪微博4664条标注数据,分别构建GRU模型和CNN-GRU复合模型进行检测。实验结果表明,GRU模型准确率达89.36%,而结合CNN提取文本深层特征的复合模型进一步提升至92.43%。研究还验证了模型在早期谣言检测中的有效性,为遏制谣言传播提供了技术方案。通过融合文本和时间特征,该方法在识别准确率和时效性方面均取得良