登录社区云,与社区用户共同成长
邀请您加入社区
Istio提供了多个内置的安装配置文件(profile),包括`default`、`demo`、`minimal`、`external`、`empty`、`ambient`等。在服务网格的演进过程中,出现了多个代表性的实现方案。在大模型微服务场景下,需要精细调整Sidecar的资源限制,并在适当的情况下考虑使用Ambient Mesh模式彻底消除Sidecar的开销。这些特性要求流量管理具备更精细
在中,是用来扩展和自定义数据平面(即 Envoy Proxy)行为的一种机制。它允许用户以更灵活、更高效的方式增强流量处理能力,而不需要修改 Envoy 的源码。
K8S V1.35新版已经不支持ingress了,所以要用istio代替。本文记录安装设置过程,供大家参考学习。
Service Mesh 是一种专门用于处理服务间通信的基础设施层。它的核心思想是:将服务间通信的复杂逻辑从业务代码中剥离,交由独立的基础设施处理。Service A →(嵌入重试、鉴权、日志等逻辑)→ Service BService A → Sidecar Proxy → 网络 → Sidecar Proxy → Service B业务服务只关心“调用谁”,而通信细节全部由 Mesh 处理。业
在 Kubernetes 中,Ingress 一直是处理七层 HTTP 流量的标准方式。但随着业务复杂度提升,Ingress 暴露出了不少问题:功能依赖不同控制器的自定义注解、各实现间兼容性差、扩展性弱。为了解决这些痛点,Kubernetes 社区推出了,它被称为 Ingress 的下一代标准,提供了更模块化、更通用、更可扩展的流量管理能力。本文将带你从理论到实操,完整走一遍 Gateway AP
本文系统对比了TiDB和ClickHouse两种数据库的核心差异与适用场景。TiDB采用HTAP架构,兼容MySQL协议,支持分布式事务与实时分析(通过TiKV行存+TiFlash列存),适合OLTP与混合负载场景。ClickHouse专注OLAP,列式存储和向量化引擎带来超强分析性能,但缺乏事务支持,不适合高频写入。性能测试显示:TiDB在TPC-C(OLTP)场景表现优异(12万TPM),而C
本文系统介绍了Service Mesh核心概念与Istio实践应用。针对微服务通信治理痛点,提出基于Istio的解决方案,通过Sidecar模式实现流量管理、安全控制和可观测性,实现业务代码零侵入。 文章分为三部分:首先阐述Service Mesh的必要性,对比传统方案与Istio架构优势;其次详细讲解Istio的安装部署流程,包括生产级Helm配置和Sidecar注入验证;最后通过Virtual
eBPF:从内核技术到生产级基础设施的演进之路 摘要:eBPF作为革命性的Linux内核扩展技术,实现了安全高效的内核态编程,正在重塑云原生基础设施。本文通过三大生产场景分析其价值:1)云原生网络性能加速,相比传统方案降低50%延迟和60%CPU开销;2)下一代安全防护,支持7.3Tbps级DDoS防御和微秒级响应;3)LLM异构计算可观测性,实现零侵扰的全栈性能剖析。技术对比显示,eBPF与K8
Service Mesh / Istio / Envoy
在当今复杂的Web应用中,精细化的权限管理是保障系统安全的关键环节。PHP-Casbin 作为Casbin生态的PHP实现,凭借其灵活的模型支持和强大的扩展能力,已成为PHP开发者实现访问控制的首选工具。
通过深度集成 Rust 与 Istio,开发者可在保障内存安全的前提下,实现细粒度流量治理、毫秒级故障恢复和零信任安全体系,为云原生应用提供新一代基础设施支撑。
在云原生技术栈中,Istio 已经从一个新兴的服务网格项目,成长为微服务治理领域的事实标准。自 2023 年从 CNCF 毕业以来,Istio 一直在“成熟度”和“创新”两条主线上并行推进。2026 年,随着 Ambient 模式的全面可用和 1.30 版本的发布,Istio 正在经历一次架构层面的深刻变革。
数据库连接超时问题定位,Istio 服务网格内连接外部 MySQL 数据库
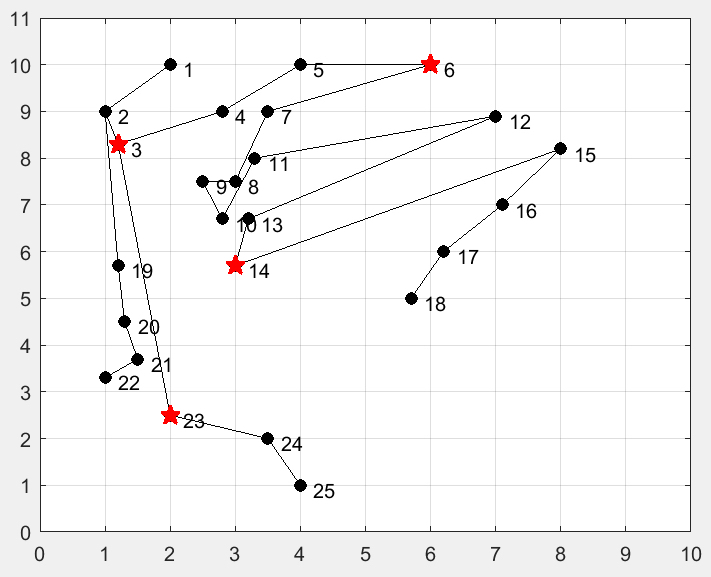
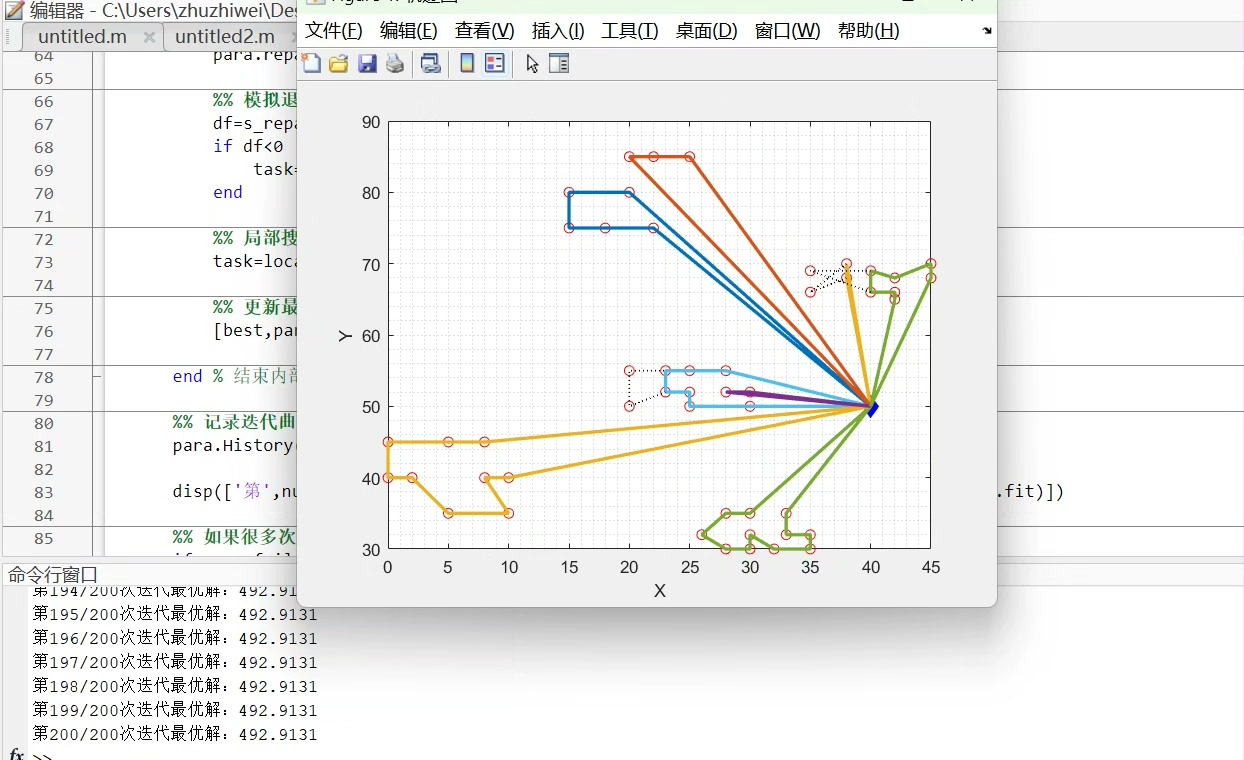
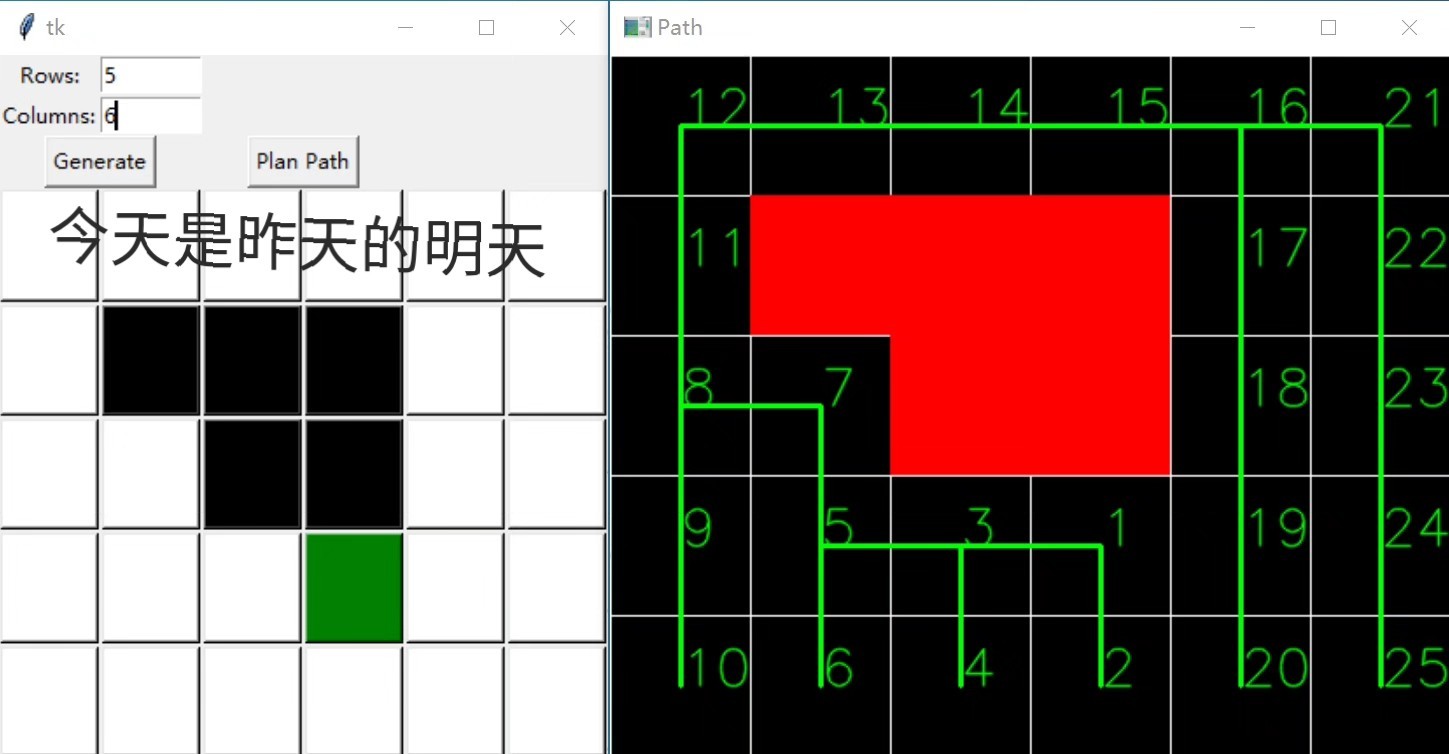
移动机器人全覆盖路径规划代码基于深度优先搜索(DFS)算法,广度优先搜索(BFS)算法,生成覆盖树(STC)算法,最小生成树(MST)算法等等的全覆盖路径规划代码matlab Python版本在移动机器人领域,全覆盖路径规划是一个关键问题,它关乎机器人如何高效地遍历给定区域。今天咱们就来讲讲基于深度优先搜索(DFS)、广度优先搜索(BFS)、生成覆盖树(STC)以及最小生成树(MST)算法的全覆盖
2026年,端侧大模型(On-Device LLM)已经从"概念演示"走向"规模商用"。:- 实时翻译(延迟<100ms要求)- 智能助手(离线可用)- 隐私敏感场景(医疗、金融)- AR/VR交互(毫秒级响应)- IoT设备(无网络或弱网环境)## 2026年端侧模型的核心技术### 1. 模型量化:精度与性能的平衡。但端侧部署不是把云端模型"压缩一下"那么简单。## 端侧大模型的真实价值为什么
text### 5.2 关键监控指标| 指标类别 | 关键指标 | 告警阈值 ||---------|---------|---------|| 性能 | P50/P95/P99延迟 | P99 > 10s || 成本 | 每请求成本 | 异常突增50% || 错误率 | 4xx/5xx/超时比例 | > 1% || 限流 | 触发限流请求数 | 持续增长 || 缓存 | 命中率 | < 30%
2026年,企业部署的大模型推理服务规模已经从"几个端点"演变为"几十个模型、上百个端点"。一个典型的中型AI应用可能同时使用:GPT-4o处理通用对话、Claude处理长文档、DeepSeek处理代码、Qwen-VL处理图像、自托管的Llama 3.3处理私密数据。本文将系统介绍2026年LLM服务网格的架构设计、核心组件和生产实践。## 写在最后LLM服务网格是2026年AI基础设施的。##
摘要: 文章探讨了从SpringCloud全家桶到Istio服务网格的云原生架构演进历程。SpringCloud虽成熟稳定,但存在多语言支持不足、升级复杂等问题。Istio通过Sidecar透明代理将治理逻辑下沉到基础设施层,实现零代码改造、多语言兼容,并整合流量管理、安全认证和可观测性能力。文章对比了SpringCloud与Istio的适用场景,指出Istio更适合多语言混部、标准化运维的中大型
Istio 是一个开源的服务网格(Service Mesh),它为微服务架构提供了强大的管理、连接和保护能力。在 Istio 架构中,主要分为控制面(Control Plane)和数据面(Data Plane)。下面我们将详细解析这两个面的角色、核心组件以及流量路径。
这次事故从头到尾 10 分钟解决,但复盘后我意识到:真正救命的,是平时养成的两个习惯。第一,工具链常备。不是临时装的,是每台服务器的标准配置。如果你现在还没装 Percona Toolkit,今天就去装。**第二,对"定时任务"保持警惕。**很多深夜故障不是流量洪峰,是某条" harmless "的清理脚本。任何操作生产数据的脚本,都要问自己:这条 SQL 在从库回放时,会不会卡住?如果你也遇到过
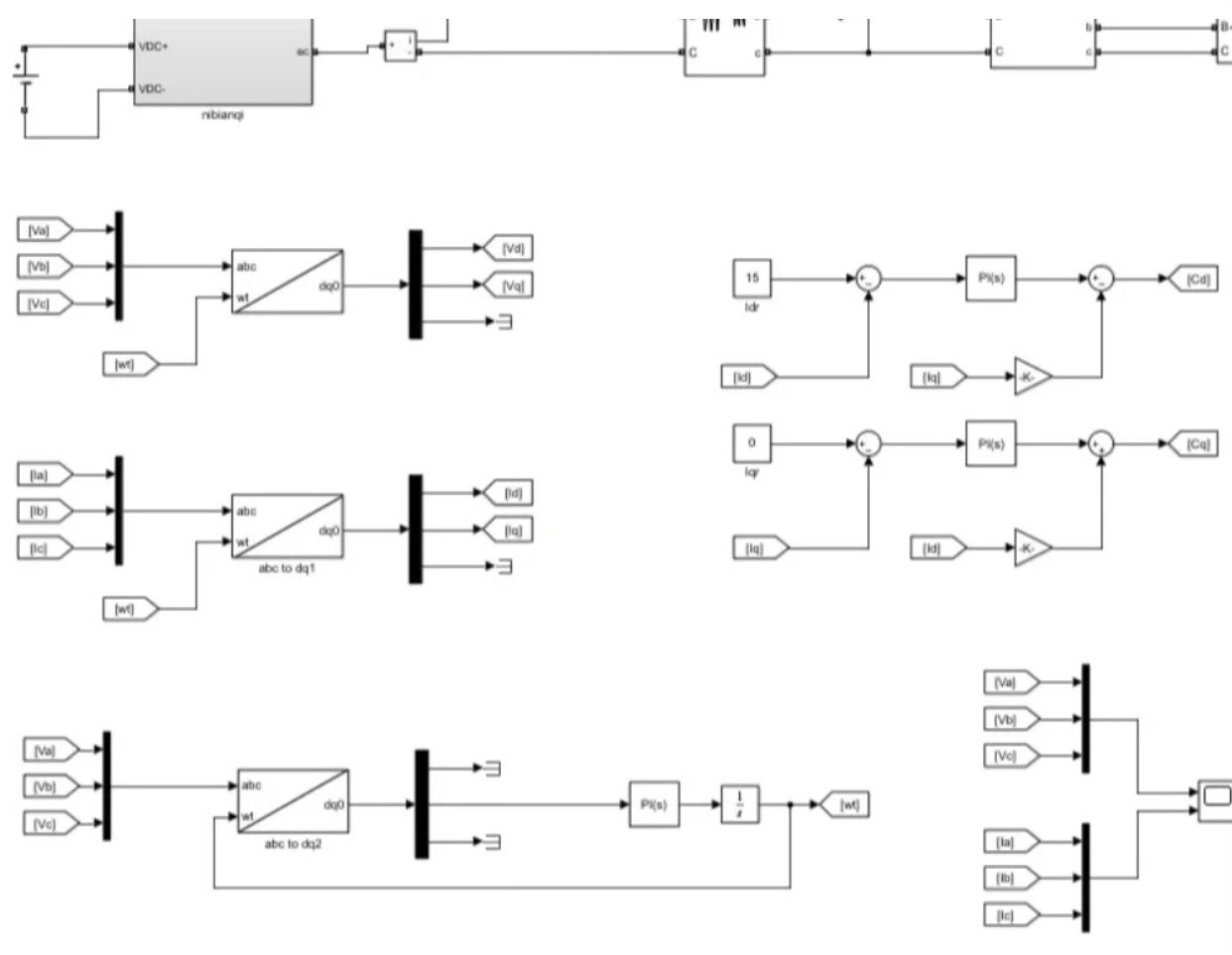
双馈风机储存的转子动能可用来应对频率变化。当系统频率降低时,风机释放转子动能,增加有功输出,支撑系统频率。简单理解,就像风机自己有个小能量仓库,关键时刻能拿出来应急。
HL07:ST PMSM FOC电机控制资料包,ST芯片电机控制包2.0全源代码资料,有文档,有多个工程源码,赠送stm32库培训资料,例程源码以及4.2的库。可学习,可参考!最近发现了一个超赞的资料包——HL07:ST PMSM FOC 电机控制资料包,感觉必须要和大家分享分享。这个资料包可真是电机控制领域的“宝藏”,特别是对于想要深入学习 ST 芯片电机控制的朋友来说,简直是福音。
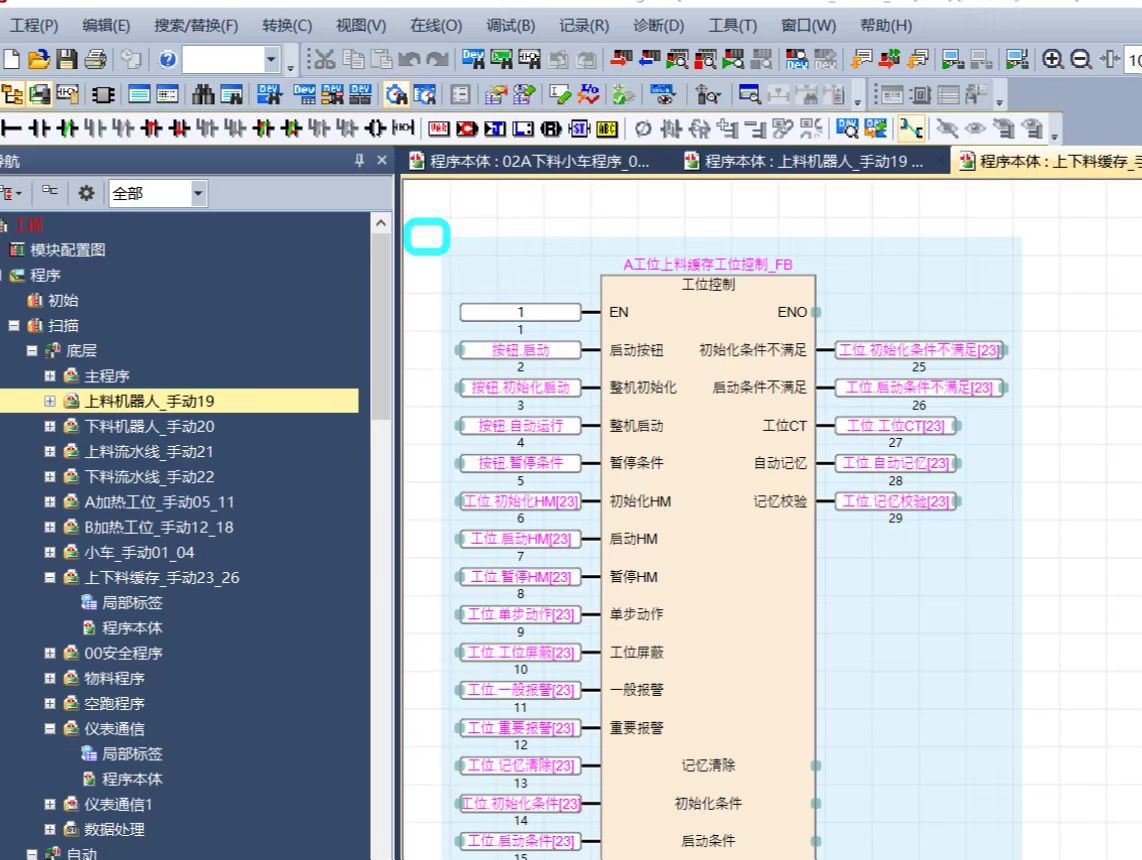
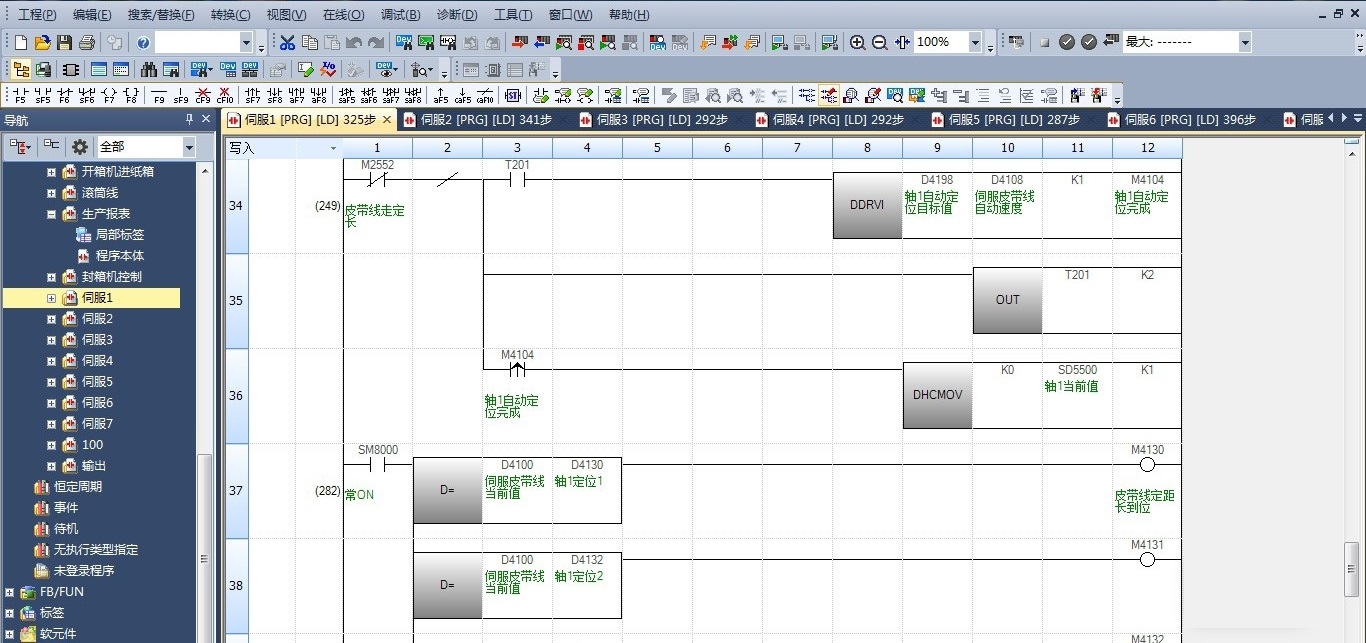
搞完这些模块,最大的心得不是技术多牛逼,而是发现好的程序结构就像乐高积木——每个功能块都能独立测试,插拔自由。来,带你们看看这套组合拳是怎么打的。三菱R系列PLC及触摸屏程序,各种标准功能块,与雅马哈机器人控制程序,含手自动程序,报警程序,模拟量程序,同步轴轴定位程序,扫码枪程序,串口485/232/TCP通信等功能块程序等。三菱R系列PLC及触摸屏程序,各种标准功能块,与雅马哈机器人控制程序,含
这种规划方法的价值不仅在于数学最优解,更重要的是为决策者提供动态方案——当交通流量模式因地铁开通发生变化时,能快速生成新的选址方案。下次等红灯时,或许你眼前的充电站位置,正是某个算法在千万次迭代中找到的最优解。这种动态平衡正是群体智能的优势,就像高峰期的网约车调度,既不能空车乱跑,又不能都挤在商圈。算法迭代过程中,每个"粒子"都在同时嗅探两个方向:自己历史最优位置和群体最优位置。更新公式里的惯性权
在之前的文章中,我们花了大量的篇幅,从记录后端pod真实ip开始说起,然后引入envoy,再解决了各种各样的需求:配置自动重载、流量劫持、sidecar自动注入,到envoy的各种能力:熔断、流控、分流、透明代理、可观测性等等,已经可以支撑起一个完整的服务治理框架了而今天介绍的istio,正是前面提到的这些所有功能的集大成者,从本文开始,我们将详细介绍istio,并且与之前手搓的功能做一个详细的对
初始化阶段,我们生成一个初始解,这个解可以是一个简单的贪心解,或者随机生成的解。接下来,在破坏阶段,我们随机移除一部分解中的元素,比如在配送问题中,我们可以随机移除一些配送点。然后,在修复阶段,我们通过某种策略重新插入这些被移除的元素,生成一个新的解。在无人机与车辆混合配送问题中,破坏策略可以设计为随机移除一些配送点,或者移除某些特定的配送点(比如距离较远的点)。比如,在无人机与车辆混合配送问题中
三菱FX5U七轴标准程序,包含轴点动,回零,相对与绝对定位,整个项目的模块都有:主控程序,复位程序,手动,生产计数,只要弄明白这个程序,就可以非常了解整个项目的程序如何去编写,从哪里开始下手,可提供程序问题解答,程序流程清晰明了;通过以上几个模块的讲解,我们详细分析了三菱FX5U七轴标准程序的核心逻辑和实现方式。本文主要讲解三菱FX5U七轴标准程序的结构与实现方式。通过本程序的讲解,大家能够快速掌
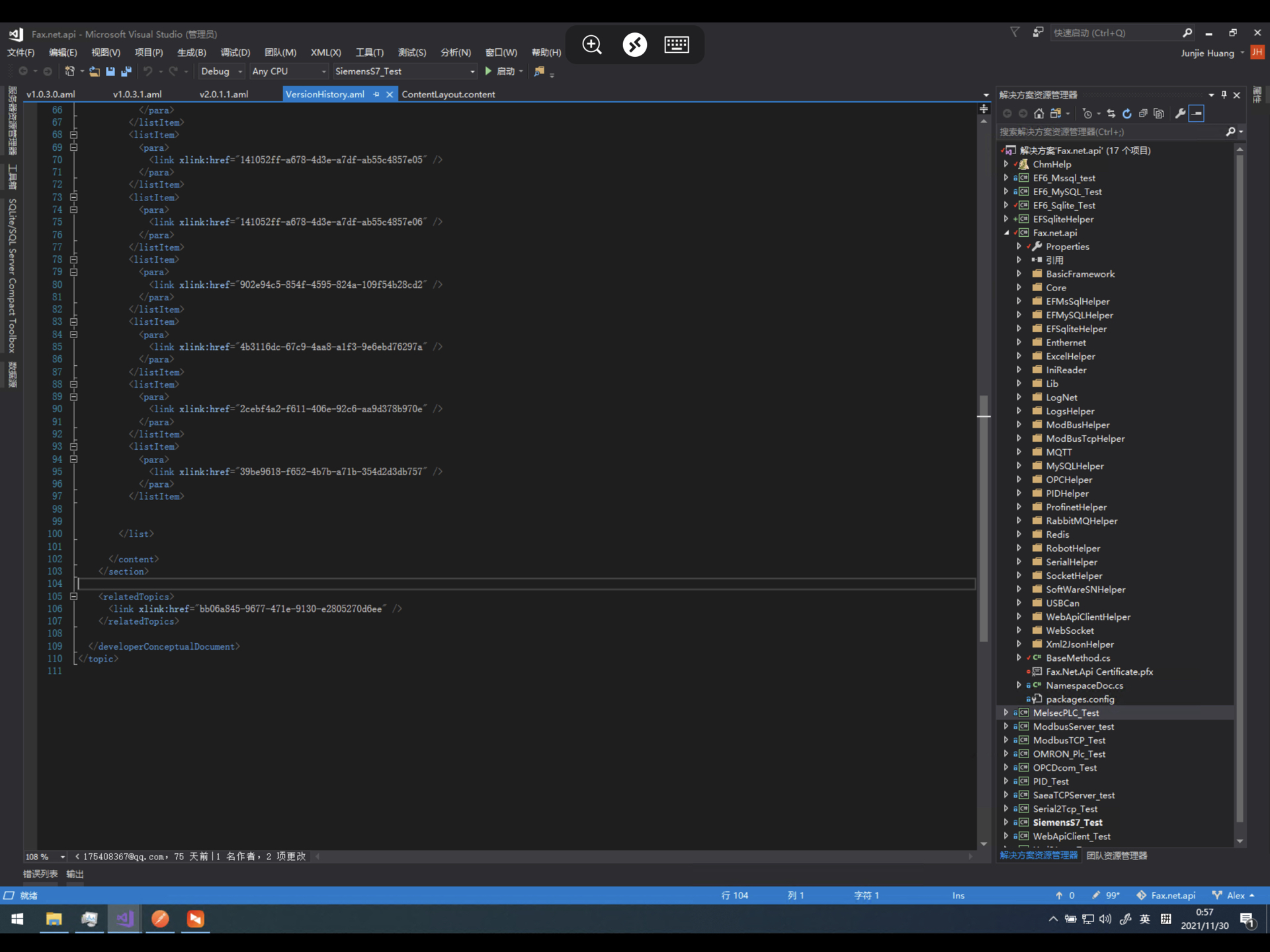
包括串口通信,TCP客户端,tcp服务器端,高并发物联网接收服务器端,udp通信,can总线通信,profinet,modbus tcp rtu dtu等,各大品牌plc通信,opc ua,opc da,http通信,mysql常规库,ef6+mysql,ef6+sqlite,firebird数据库,ini配置文件操作,excel表格操作(包括模版化导出),rabbitmq消息队列管理库,Rabi
通过对日立HGP电梯MCUB03主板和变频器的深入探讨,我们可以看到,电梯的安全运行离不开每一个细节的把控和每一个元件的正常工作。作为电梯维护工程师,我们需要不断学习和积累经验,才能更好地应对各种复杂的维修情况,确保电梯的安全运行。日立hgp电梯mcub03主板原理图日立hgp电梯变频器维修图纸。
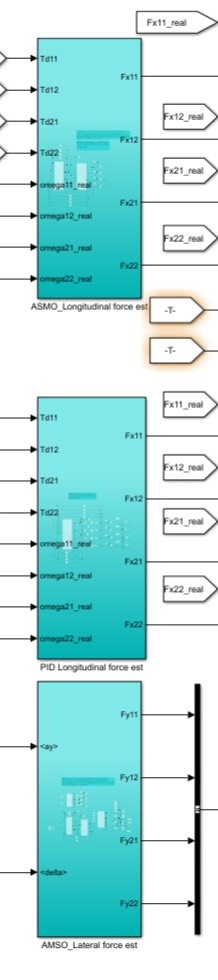
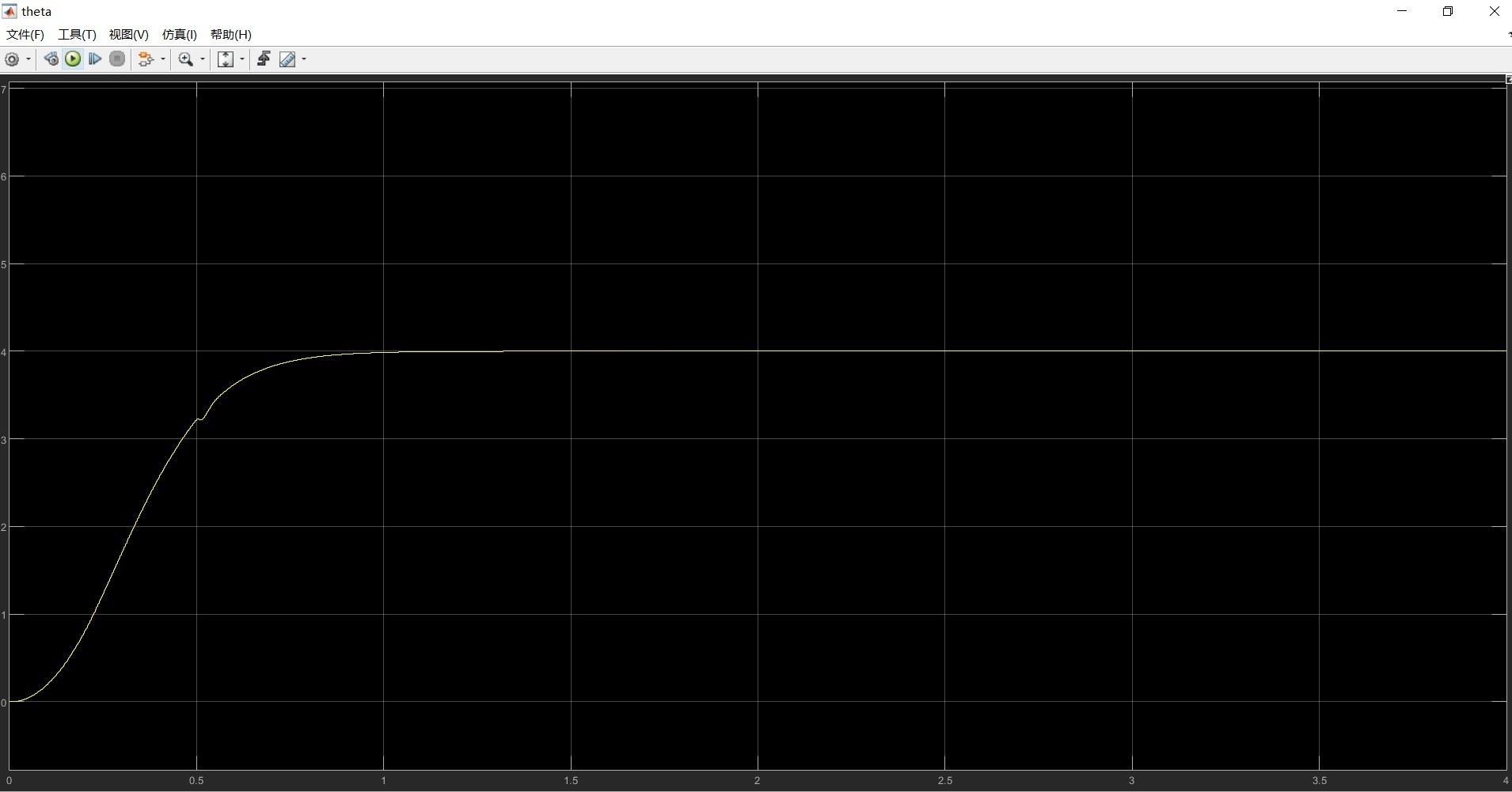
在双移线工况下对比,传统模型估计的侧向力最大误差能达到300N,而滑模观测器的误差始终压在50N以内。自适应滑膜观测器估计轮胎纵向力和侧向力,可提供免费讲解与carsim 联合仿真,估计结果可作为汽车行驶状态滤波器的输入代替轮胎模型,比轮胎模型精度更高,基本贴合carsim 值,可以教如何调参。自适应滑膜观测器估计轮胎纵向力和侧向力,可提供免费讲解与carsim 联合仿真,估计结果可作为汽车行驶状
这两年拿ADRC(自抗扰控制)搞PMSM伺服控制的案例越来越多,特别是三阶ADRC结构,实测抗负载扰动和参数摄动效果真挺惊艳。玩控制算法就像拼乐高,ADRC作框架,再融入滑模的抖振抑制、预测控制的优化思想,调参时能少掉几根头发。模型预测控制,滑模控制,自抗扰控制,广义预测控制,反步控制等各种控制算法任意排列组合都有。模型预测控制,滑模控制,自抗扰控制,广义预测控制,反步控制等各种控制算法任意排列组
针对该智能楼宇群系统中运营商与用户之间的交易关系,本文基于非合作博弈的“一主多从”Stackelberg模型提出了智能楼宇群日前能量管理优化模型,并证明了该博弈均衡解的存在性和唯一性,并针对其求解提出了相应的算法并证明了其收敛性。针对该智能楼宇群系统中运营商与用户之间的交易关系,本文基于非合作博弈的“一主多从”Stackelberg模型提出了智能楼宇群日前能量管理优化模型,并证明了该博弈均衡解的存
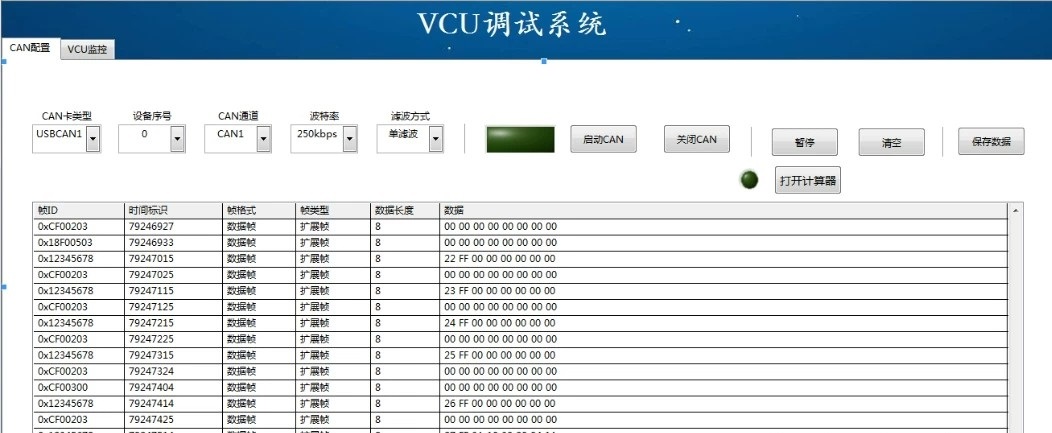
labview can通讯上位机,调用周立功的库,能够实现基本通讯,默认配置了USBCAN1和USBCAN2,适合小白上手,有库文件说明文档。在工业控制和汽车电子等诸多领域,CAN(Controller Area Network)总线通讯应用极为广泛。今天咱就来聊聊如何用LabVIEW搭建一个CAN通讯上位机,而且是调用周立功的库,超适合小白上手哦!
摘要 本文深入对比了服务网格Istio与传统微服务架构的核心差异。传统模式(如Spring Cloud)通过SDK集成治理逻辑,存在代码侵入性强、多语言支持差、升级困难等痛点。Istio采用边车代理模式,通过Envoy实现流量透明拦截,将治理功能从应用层下沉至基础设施层,显著降低了侵入性。文章详细解析了Istio的流量管理机制,包括VirtualService的路由规则、DestinationRu
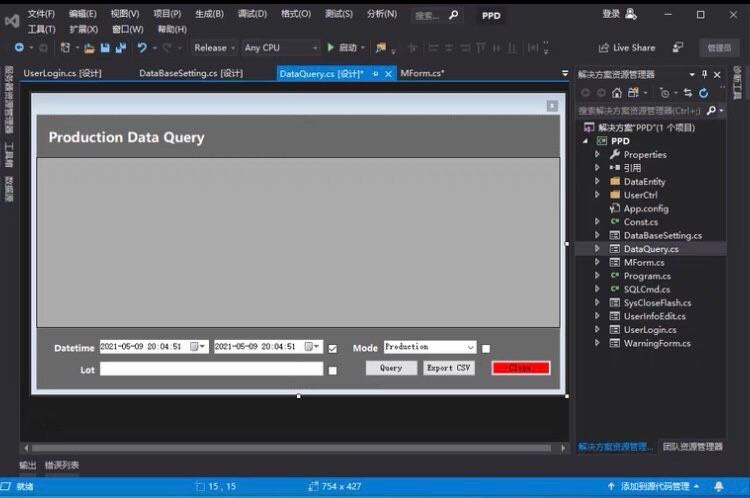
C#注塑机上位机数据追溯plc-s7_1500 双重数据库 多线程 数据导出注塑机上位机数据追溯1,采用C#编写。2,plc为$7 1500。3,双重数据库,本地和远程同时存取,mssa12012。,同时使用OPGDA和OPCUA。OPCDA链接5使用多线程,界面流畅有好。,数据查询与导出在工业自动化领域,注塑机上位机的数据追溯至关重要。它不仅能帮助企业实时监控生产过程,还能在出现问题时快速定位根
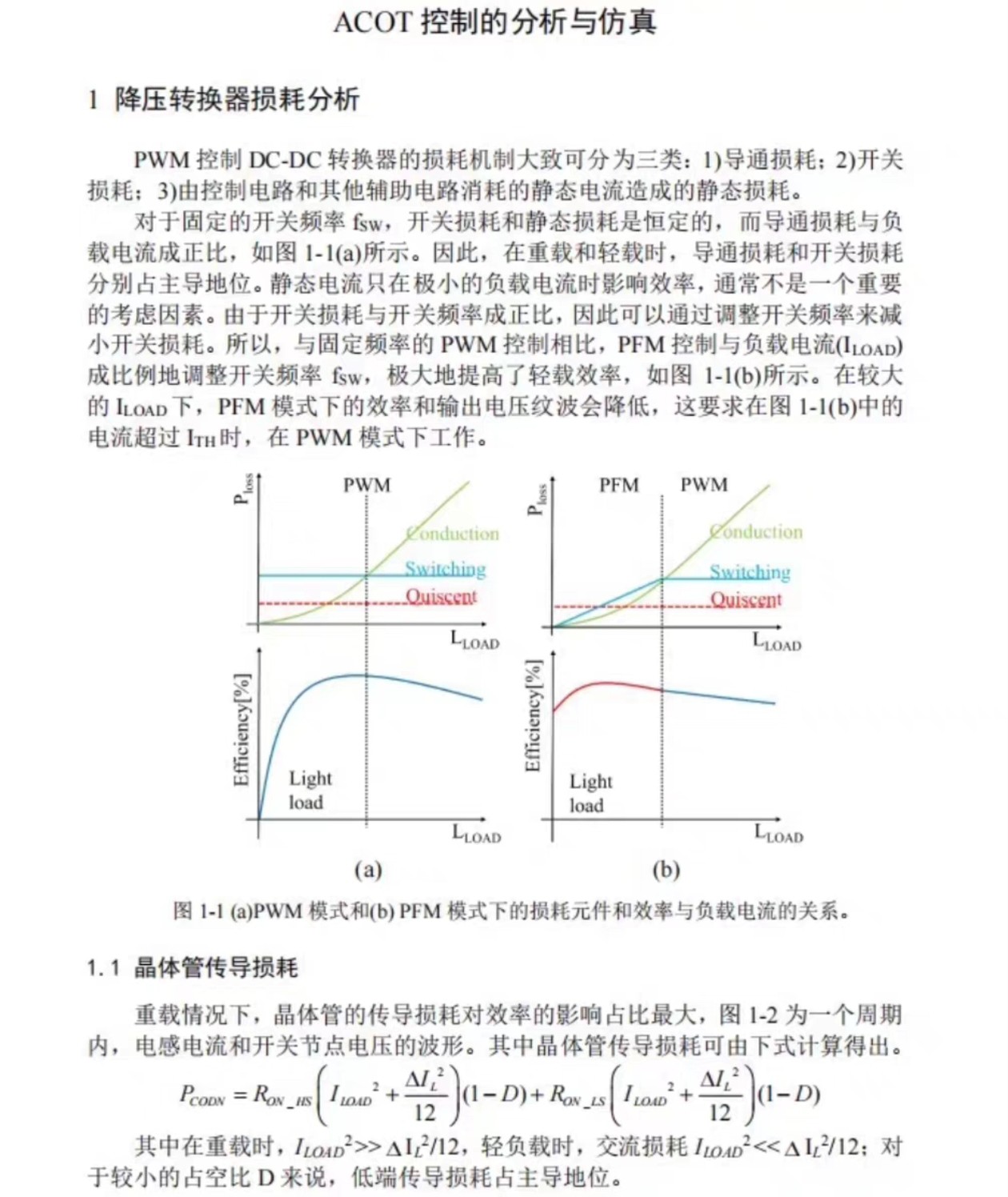
通过这次设计,我们实现了一个高效、稳定的同步降压型DCDC变换器,并通过AOT控制提高了其适应性和性能。如果你对电源管理电路感兴趣,不妨尝试自己动手设计一个,或者直接使用提供的文档和测试电路进行仿真学习。希望这篇文章能为你提供一些启发和帮助!
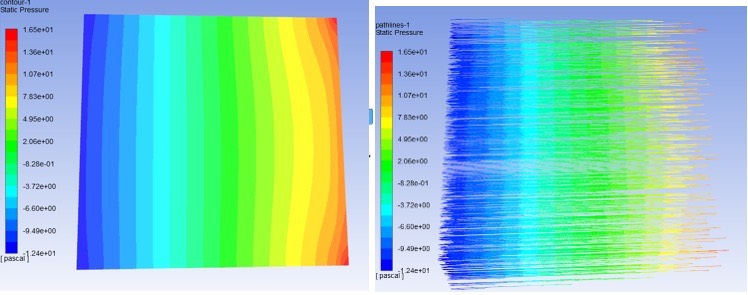
最后提醒,别在办公室跑全尺寸模型,记得用简化模型调参——除非你想让工作站风扇比风噪还响。材料参数设置要注意各向异性,玻璃的杨氏模量通常在70GPa左右,泊松比取0.23比较合理。最近折腾了两个典型场景的仿真方案,今天直接上干货,重点聊聊频域FEM法和时域BEM法的实现套路。再来说说叶片风噪的时域仿真,这得请出边界元法(BEM)。和FEM不同,BEM只需要在表面布点,适合处理无限域问题。可以掌握基本
这个方案的核心是引入一个“配置聚合层”,它负责从数据库(或配置中心)读取针对同一应用的所有独立路由功能配置,按照预设的优先级和策略进行合并,最终生成一个完整的、下发到Istio的VirtualService。除此之外,istio的路由功能是在envoy的out bound这个上面实现的,也就是说每次的路由变更必须准确的变更到所有来源应用,也就是down streams上面才行,否则就会存在流量有损
istio
——istio
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 AI编程社区
AI编程社区











 AI Agent技术社区
AI Agent技术社区


 亚马逊云科技技术品牌专区
亚马逊云科技技术品牌专区
 DAMO开发者矩阵
DAMO开发者矩阵

 脑启社区
脑启社区
 MCP技术社区
MCP技术社区

 EazyDevelop社区
EazyDevelop社区

 AtomGit开源社区
AtomGit开源社区

 openEuler 社区
openEuler 社区

 腾讯云开发者社区
腾讯云开发者社区