登录社区云,与社区用户共同成长
邀请您加入社区
通过这套包含所有权追踪、智能回收机制的设计体系,智能指针全面覆盖了:动态内存生命周期管理、资源初始化/最终化保障、异常安全路径覆盖等关键场景,彻底消除了内存管理问题带来的代码隐性成本。智能指针的设计源于C++内存管理的不可逆痛点:手动管理易致资源泄漏、悬垂指针及双重释放等问题。/ 其他清理逻辑 / }};// 原unique的指针被隐式转换为raw指针。// 自动移动所有权。3. 构造/析构逻辑:
哈希查找| `unordered_map`| O(1) (average)|| 稳定排序| `list` + `sort`| O(n log n)|| 连续插入/遍历| `vector`| O(1) (average)|| 频繁动态插入/删除| `deque`| O(1) (amortized)|
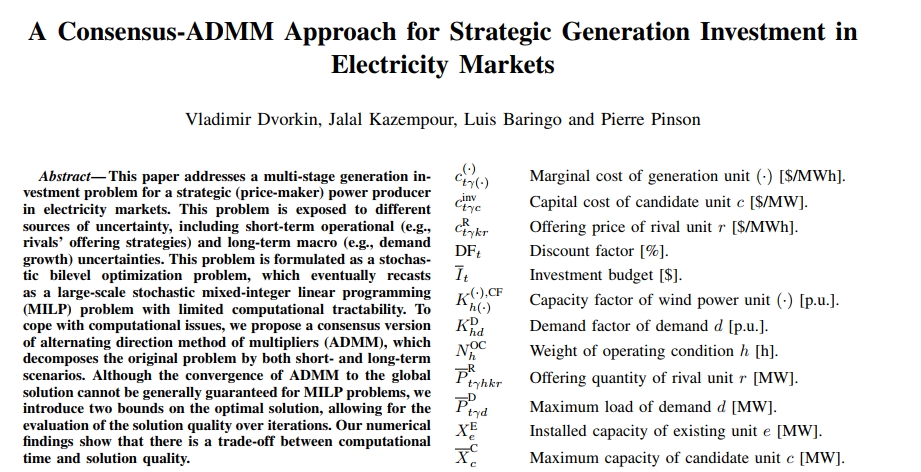
本程序主要介绍ADMM算法在GAMS中的编写方式,模型基于发电商竞标策略进行编写,基本包含了文章中的模型,但并非完全复现,可作为参考程序自学使用,也可在程序的基础上进行修改使用。本程序主要介绍ADMM算法在GAMS中的编写方式,模型基于发电商竞标策略进行编写,基本包含了文章中的模型,但并非完全复现,可作为参考程序自学使用,也可在程序的基础上进行修改使用。程序包括两个,分别为解决战略投资问题的广义M
本文系统介绍了LoRa低功耗广域网技术。首先对比了各类通信技术的优缺点,指出LoRa兼具远距离和低功耗的优势。详细解析了LoRa的物理层调制技术(Chirp扩频)和系统架构(终端-网关-服务器),重点阐述了三大核心参数:扩频因子(SF)、带宽(BW)和编码率(CR)对性能的影响。文章还分析了接收灵敏度、通信距离等关键指标,并介绍了LoRaWAN的三种工作模式(Class A/B/C)及其适用场景。
RTOS作为嵌入式系统的核心,其设计哲学是在有限的资源下提供确定性的实时响应。理解RTOS的核心机制不仅有助于正确使用现有RTOS,还能为自定义调度器或操作系统内核打下基础。未来发展趋势安全性增强:支持功能安全标准(如ISO 26262、IEC 61508)虚拟化支持:在同一硬件上运行多个OS实例AI集成:为边缘AI计算提供实时调度支持云原生:与云平台无缝集成,支持OTA远程管理掌握RTOS的核心
该模型采用龙贝格观测器进行无传感器控制其利用 PMSM 数学模型构造观测器模型,根据输出的偏差反馈信号来修正状态变量。当观测的电流实现与实际电流跟随时,可以从观测的反电势计算得到电机的转子位置信息,形成跟踪闭环估计。龙伯格观测器采用线性控制策略代替了 SMO 的变结构控制,有效避免了系统抖振,具有动态响快、估算精度高的优点在电机控制领域,无传感器控制技术一直是研究热点,而今天要探讨的就是采用龙贝格
在微服务架构中,异步通信是构建高可用、高性能和松耦合系统的关键技术。Java生态系统为此提供了多样化的工具和框架。开发者应深入理解不同异步模式的工作原理、优缺点和适用场景,根据实际业务需求做出合理的技术选型与设计。通过有效地运用异步通信,可以显著提升分布式系统的整体韧性和扩展能力。
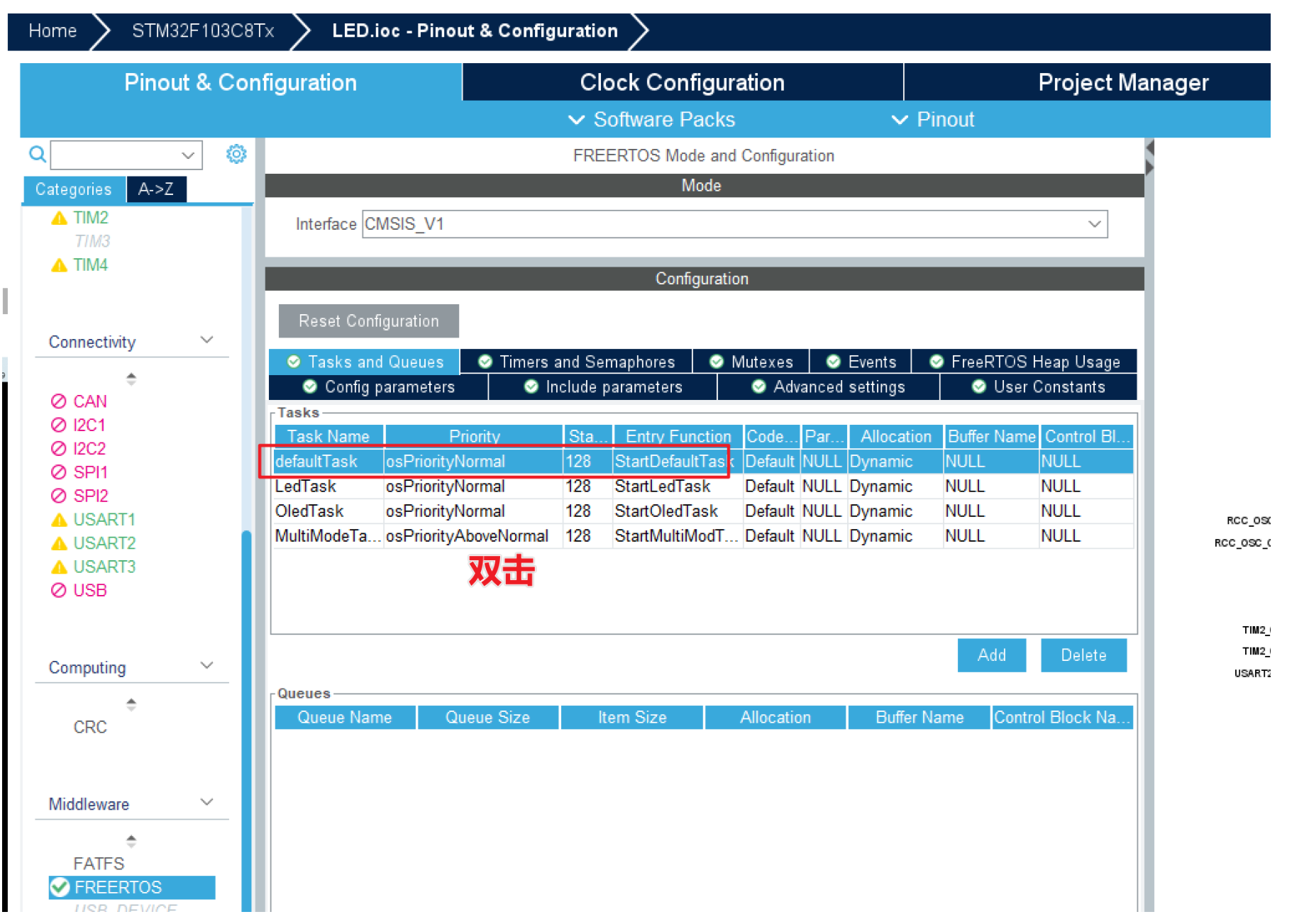
《FreeRTOS开发全景解析与实战指南》深入探讨了从裸机开发到实时操作系统的技术演进。文章系统介绍了FreeRTOS作为轻量级开源RTOS的核心特性,包括多任务调度、任务通信、内存管理等关键技术。通过智能小车控制、跨任务通信等典型案例,展示了FreeRTOS在复杂嵌入式系统中的应用优势。同时,文章客观对比了裸机开发与FreeRTOS开发的优缺点,帮助开发者根据项目需求做出合理选择。最后,文章提供
硬件STM32F103C8T6。
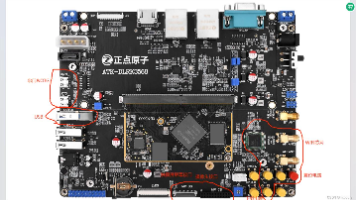
本文介绍了基于RK3568开发板的PaddleOCR环境部署过程。首先准备了正点原子开发板硬件和相关资料,详细说明了在Win10系统下烧录Debian系统的步骤,包括驱动安装和镜像烧录方法。随后配置了系统环境并安装必要依赖,重点解决了PaddlePaddle在aarch64架构上的安装问题。最后提供了PaddleOCR测试用例的目录结构代码和测试效果展示。整个部署过程涵盖了从硬件准备到软件环境配置
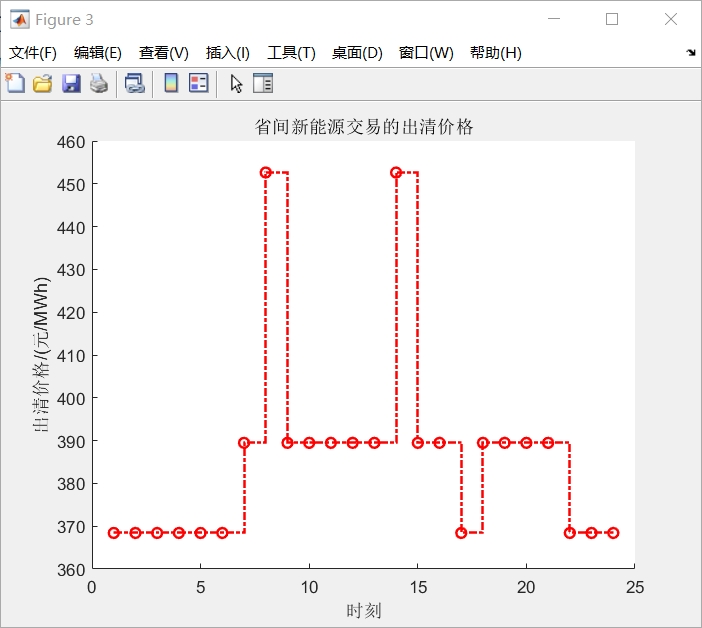
Matlab/Cplex代码:基于消纳责任权重的两级电力市场优化运行模型参考全球能源互联网的《基于消纳责任权重的两级电力市场优化运行模型》Highlights:省间可再生能源交易,双层优化模型,采用KKT和强对偶化简MPEC模型为MILP本文档针对“基于消纳责任权重的两级电力市场优化运行模型”相关Matlab/Cplex代码(Case1.m、Case2.m、Main.m),从功能定位、核心参数、约
最近在搞DSP280039C的IAP升级,发现串口烧录真是嵌入式工程师的祖传手艺。注意这个128字节的data长度不是拍脑袋定的——DSP280039C的FLASH每次写入最小单位是128bit,不对齐会触发硬件错误。注意0x80000这个地址要和你的APP工程里定义的FLASH起始地址严丝合缝,差一个字节都得翻车。实测发现如果不这么做,升级过程中突然来个中断,芯片能给你表演个当场去世。提供boo
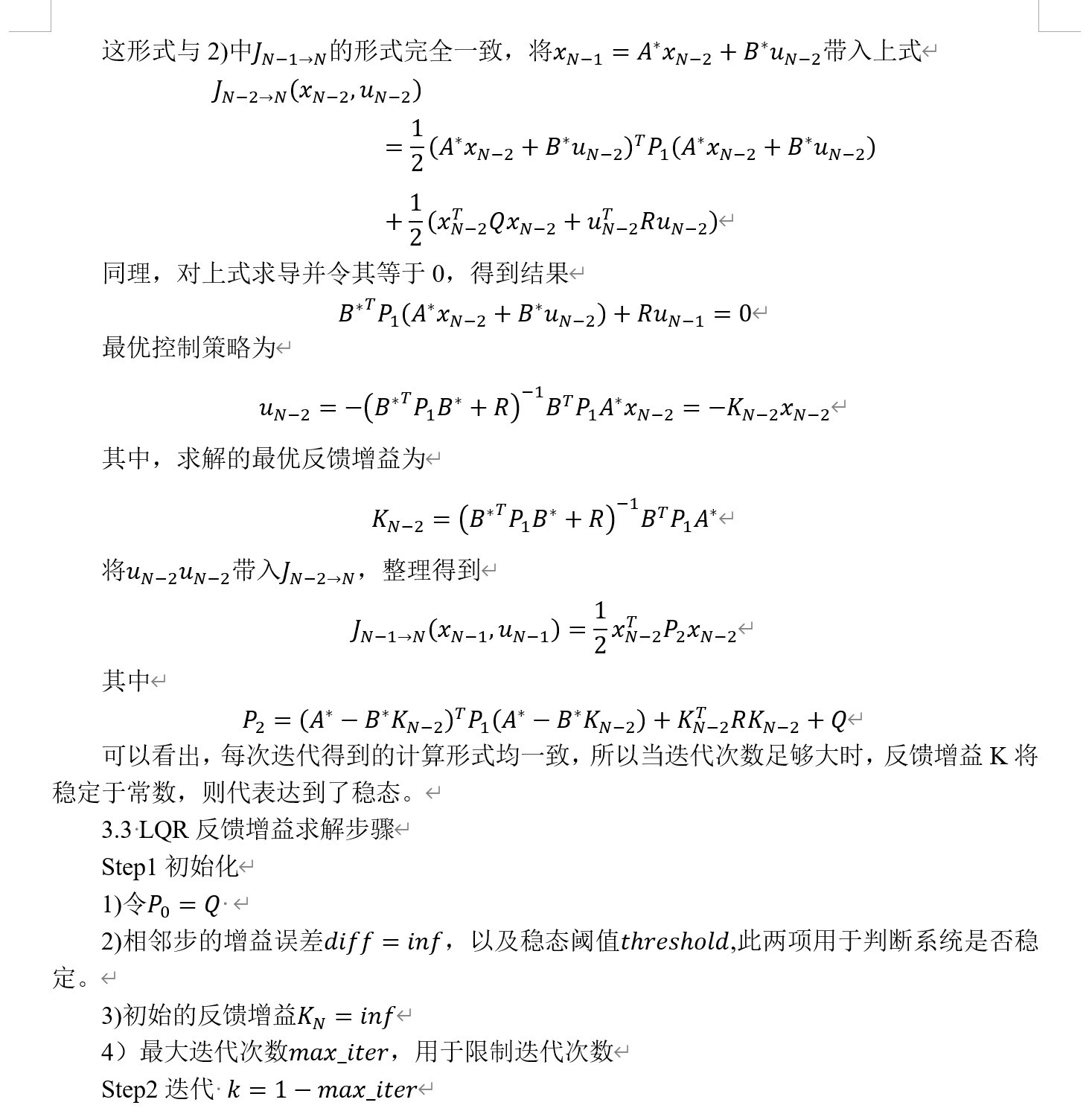
在Simulink中,我们可以设置不同的车辆状态和输入条件,通过Carsim进行联合仿真,来验证我们的AFS控制器的实际效果。此模型基于LQR开发了AFS控制器,通过编写离散LQR最优反馈增益求解算法,预先离线计算出不同车辆状态的反馈增益,可以提高控制器运行时的速度和控制效果。此模型基于LQR开发了AFS控制器,通过编写离散LQR最优反馈增益求解算法,预先离线计算出不同车辆状态的反馈增益,可以提高
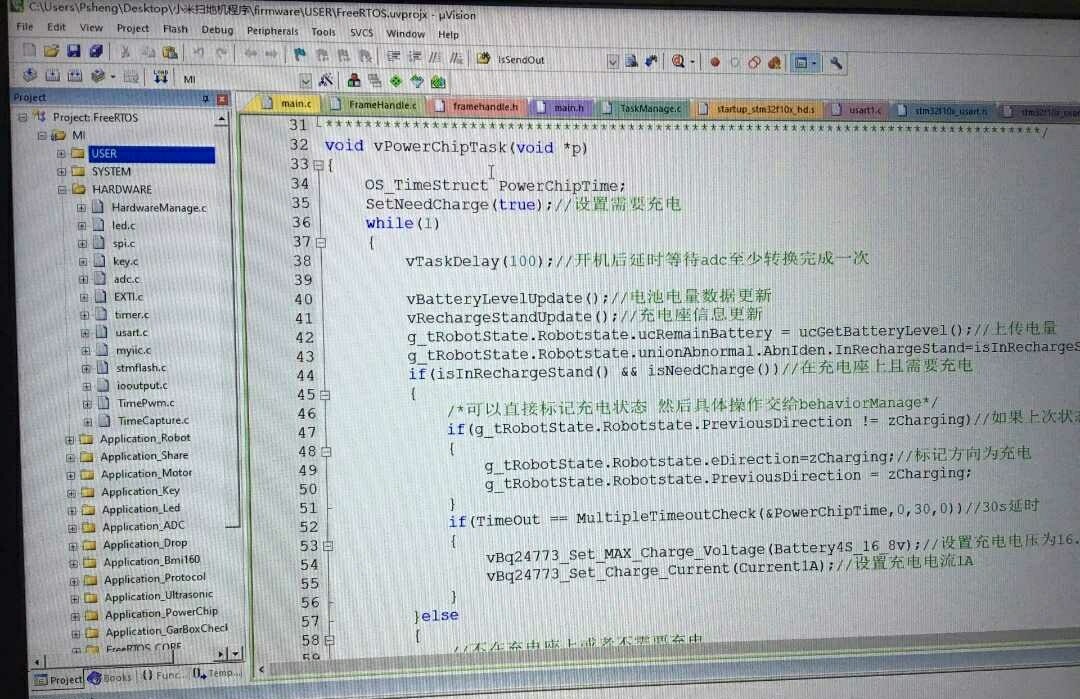
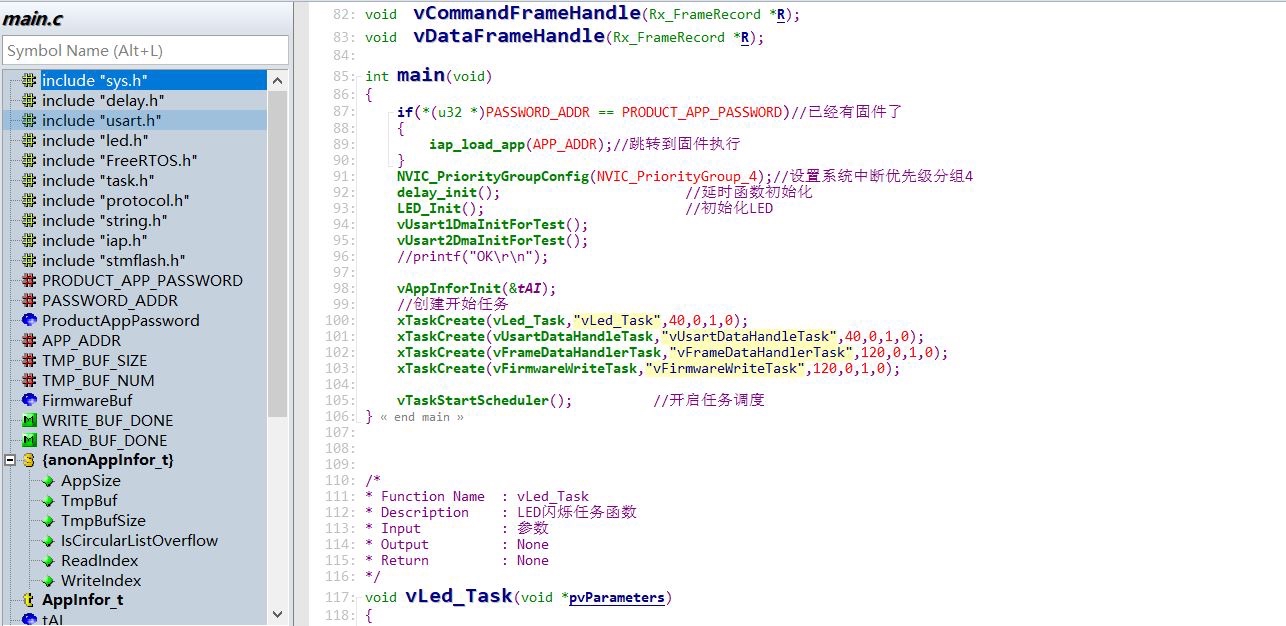
本次分析的代码来自小米扫地机程序中的IAP-Bootloader V2.0模块,包含301个文件,核心围绕Cortex-M3处理器的底层驱动与FreeRTOS实时操作系统展开,形成了一套完整的嵌入式程序运行基础框架。该程序主要分为两大核心部分:一是基于CMSIS标准的Cortex-M3内核控制模块,负责处理器核心寄存器操作、中断管理等底层功能;二是FreeRTOS实时操作系统模块,提供任务调度、事
本文档系统阐述了嵌入式系统的核心概念与设计要点。首先概述了嵌入式系统的定义、专用性、实时性等关键特性及其由传感器、处理单元、作动器等组成的核心架构。其次,详细探讨了嵌入式数据库(EDBMS)的特点与分类,以及嵌入式操作系统(EOS)的实时性、微内核/宏内核结构、多任务调度算法(如RMS、EDF)和优先级反转解决方案。接着,重点介绍了嵌入式系统特有的交叉开发方法、软硬件协同设计流程以及低功耗设计策略
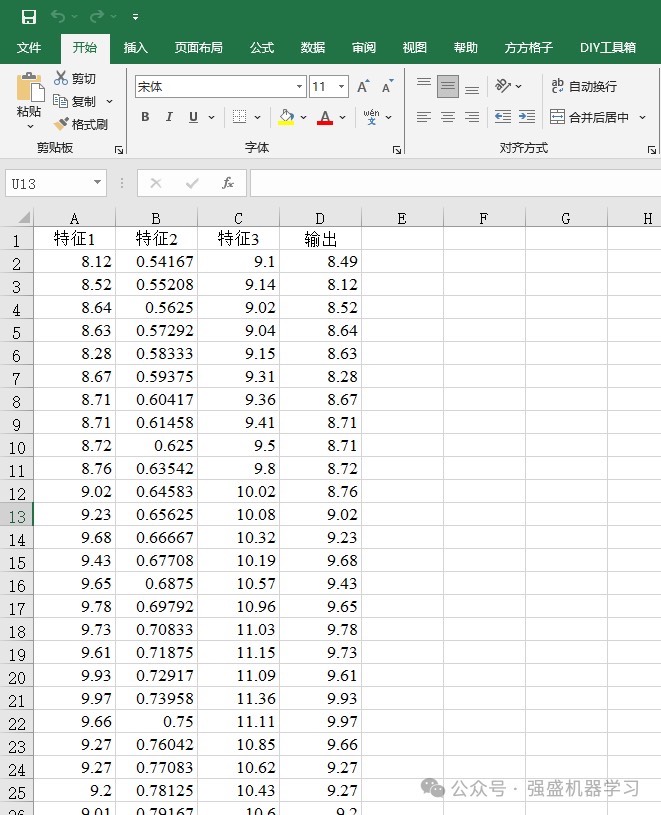
这名字听着挺唬人,但说白了就是用分位数回归(Quantile Regression)搭配双向门控循环单元(BiGRU),再套个多头自注意力机制来搞区间预测。不过要注意,当数据出现剧烈波动时(比如突然出现历史极值),PICP可能会骤降到85%,这时候建议在输入数据里加入滑动窗口统计量(最大值、方差等)作为新特征。记住这模型不是万能的,但作为baseline碾压普通ARIMA或者Prophet还是绰绰
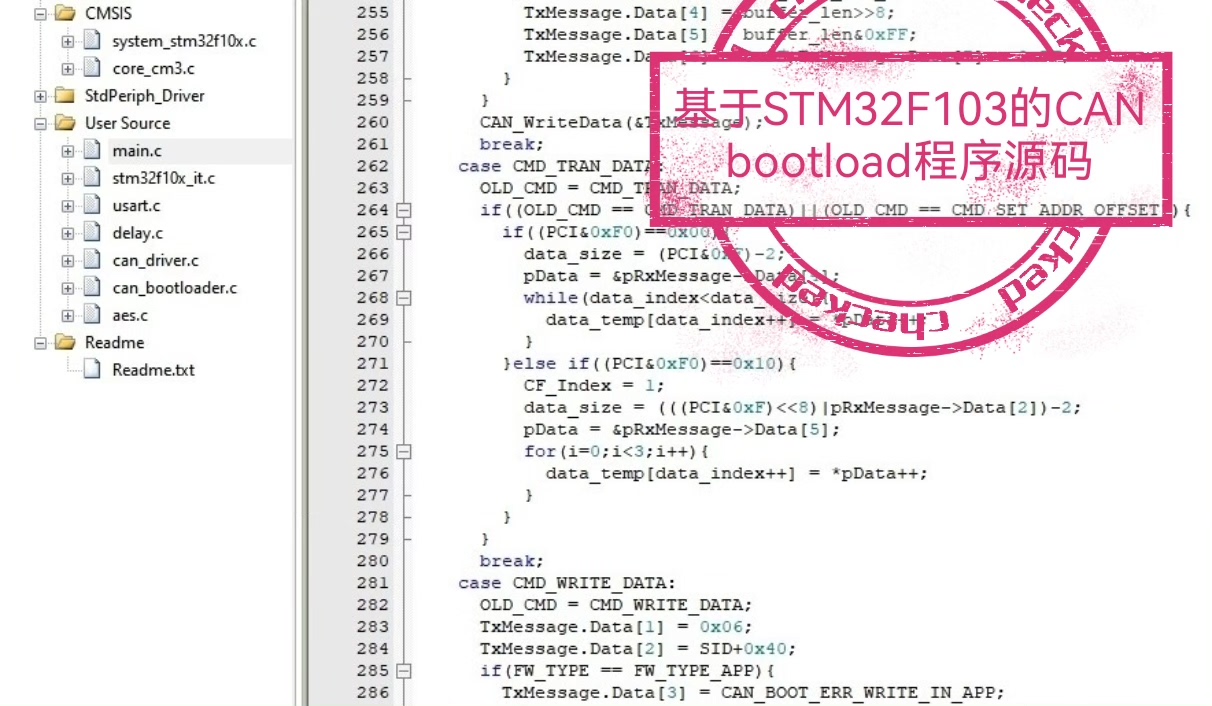
基于STM32F103的CAN bootload程序源码内容:包含boot和app两个工程,已应用到实际项目并量产在嵌入式开发领域,CAN bootload程序有着举足轻重的地位。今天就来和大家分享基于STM32F103的CAN bootload程序源码,这可是包含boot和app两个工程,并且已经成功应用到实际项目还实现量产的哦。
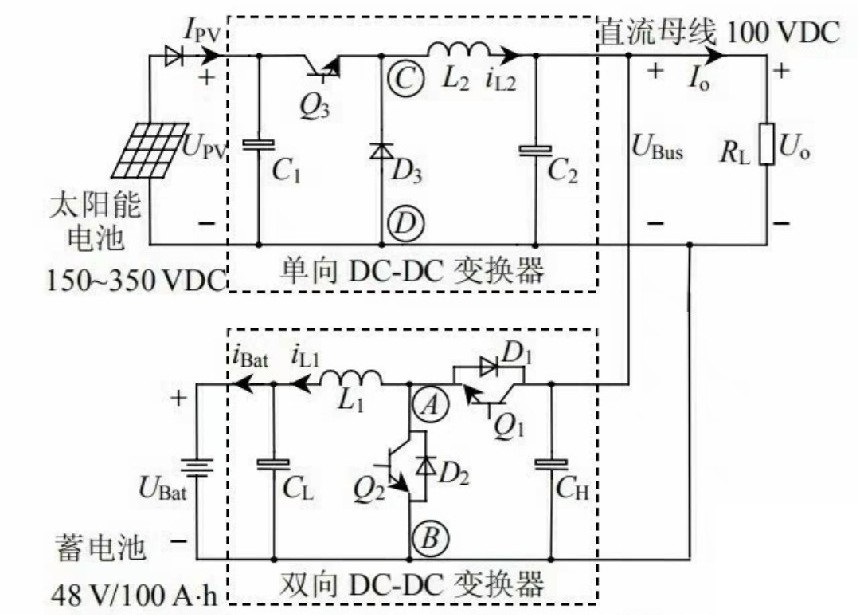
独立光伏发电系统,由太阳能电池、蓄电池、单向DC-DC变换器和双向DC-DC变换器组成,系统结构较简单,蓄电池充放电共用一个双向变换器来实现,可减轻系统的重量,同时通过双向变换器还可以控制蓄电池充放电电流,有效实现系统能量流动管理。独立光伏发电系统,由太阳能电池、蓄电池、单向DC-DC变换器和双向DC-DC变换器组成,系统结构较简单,蓄电池充放电共用一个双向变换器来实现,可减轻系统的重量,同时通过
ROS(机器人操作系统)是一个开源机器人开发框架,提供工具库和通信机制帮助开发者快速构建机器人应用。其核心是松耦合分布式通信架构,将系统拆分为独立节点模块,通过话题(异步发布/订阅)和服务(同步请求/响应)实现解耦通信。ROS支持节点跨进程/设备运行,具有容错性强、开发效率高、复用性好等优势。关键组件包括节点、节点管理器、消息/服务定义及参数系统,文件系统以功能包为基本单元。环境搭建需匹配Ubun
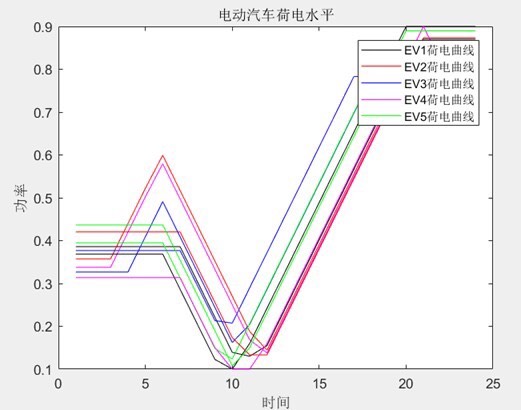
MATLAB代码:面向削峰填谷的电动汽车多目标优化调度策略关键词:电动汽车 削峰填谷 多目标 充放电优化参考文档:店主自己整理的说明文档,公式、约束、数据齐全,可联系我查看仿真平台:MATLAB YALMIP+CPLEX优势:代码注释详实,出图效果非常好(具体看图),说明文档细致详细,模型精准。
FreeRTOS通过巧妙地利用SVC、PendSV和SysTick三个异常,实现了任务启动和任务切换的高效管理。同时,通过将PendSV和SysTick异常的优先级设置为最低,确保了任务切换不会打断中断服务程序的执行,从而提高了系统的稳定性和响应性。
大厂扫地机器人 源代码,freertos实时操作系统,企业级应用源码,适合需要学习嵌入式以及实时操作系统的工程师,32端代码能实现延边避障防跌落充电等功能。硬件驱动包含 陀螺仪姿态传感器bmi160、电源管理bq24733等。软件驱动包括 IIC、PWM、SPI、多路ADC与DMA、编码器输入捕获、外部中断、通信协议、IAP升级、PID、freertos操作系统等。提供一个固件以及一个升级版固件。
本文对比分析了百度、阿里和讯飞三大语音合成API的核心差异,从免费额度、适配场景和调用难度三个维度提供选型建议。百度TTS适合新手开发者,提供1年200万字符/月的免费额度;阿里云语音服务适合电商批量合成场景;讯飞TTS则在方言支持和离线SDK方面具有优势。文章详细列举了各API的常见问题及解决方案,并附上Python调用示例代码。开发者可根据项目需求(如免费额度、方言支持或批量处理)选择最适合的
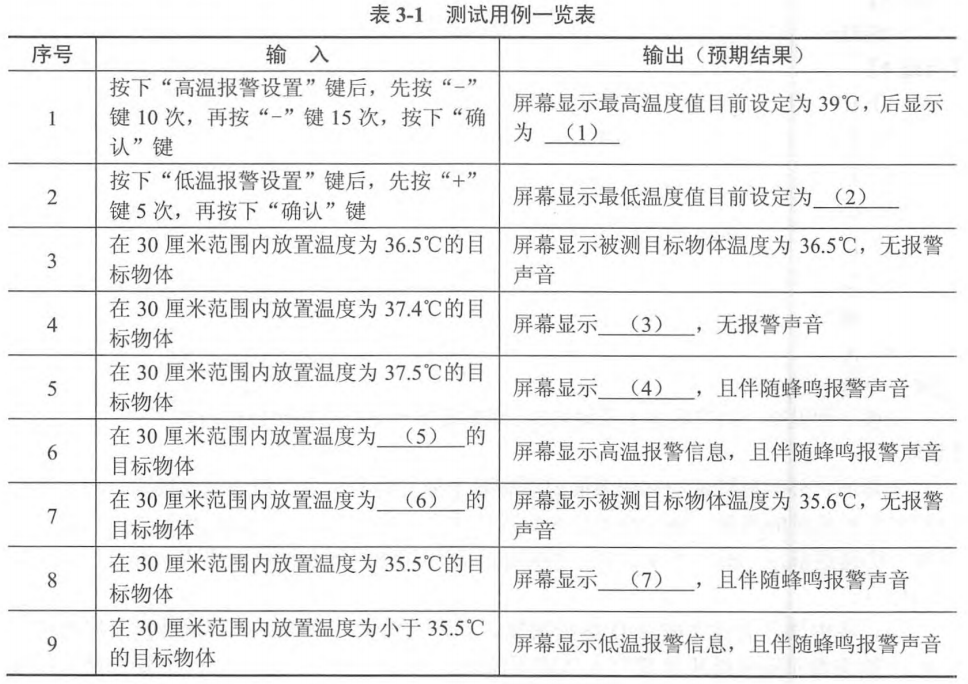
人体的红外辐射特性与它的表面温度有着十分密切的关系,门式测温仪通过对人体自身辐射红外能量的测量,便能准确地测定人体表面温度。由于门式测温仪最大的优点是非接触、快速测量,一般小于1秒钟,所以被广泛应用于机场、车站、码头、学校等人流量大的地方。该设备中软件主要完成A/D数据采集,并通过数学运算将红外数据转换为温度值,自动将额头表面温度结果换算为人体腋下温度,在显示终端显示。软件主要包括主程序模块、红外
摘要: STM32与FreeRTOS的组合凭借三大优势成为嵌入式开发“黄金搭档”:1)硬件基因契合,实现微秒级实时响应;2)生态完善,开发效率提升50%;3)免费开源+低成本,覆盖消费级到工业场景。该组合在可穿戴设备、工业控制、医疗电子及智能家居领域广泛应用,未来趋势聚焦云边协同、混合架构及边缘AI融合。学习路径建议分阶段推进,结合官方文档与社区资源快速掌握核心理论。掌握这一技术将显著提升嵌入式开
找个靠谱的中文语音机器人项目能累死!今天直接把我自己做的悟空 robot 甩出来,别他妈问东问西,看完直接上手!
锁存器和触发器的区别
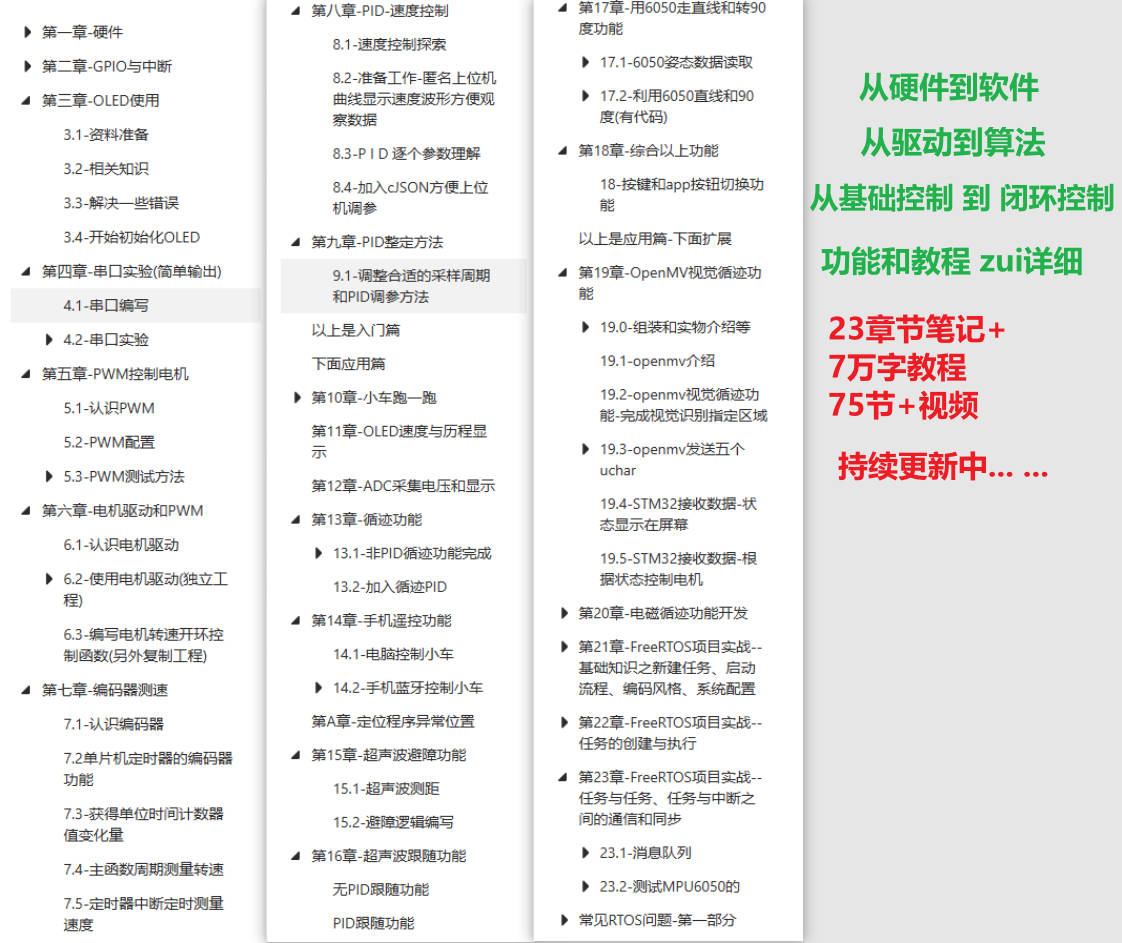
这个是全网最详细的STM32项目教学视频。第一篇视频在这里STM32智能小车V3-STM32入门教程-openmv与STM32循迹小车-stm32f103c8t6-电赛 嵌入式学习 PID控制算法 编码器电机跟随**V3:HAL库开发、手把手教学下面功能:PID速度控制、PID循迹、PID跟随、遥控、避障、PID角度控制、openmv视觉控制、电磁循迹、FreeRTOS、K210视觉智能车(更新中
这个是视频。第一篇CSDN文章在这里75STM32智能小车V3-STM32入门教程-openmv与STM32循迹小车-stm32f103c8t6-电赛 嵌入式学习 PID控制算法 编码器电机跟随。
核心结论:一个月攻克嵌入式 Linux 的关键在于 “聚焦核心、以战代练、闭环复盘”,通过 “基础夯实→原理吃透→编程落地→项目实战” 四阶段递进式学习,每日保持 6-8 小时高强度专注投入,同时规避实操陷阱、优化学习方法,可实现从入门到能独立开发简单嵌入式应用的质的飞跃。
这个是全网最详细的STM32项目教学视频。第一篇视频在这里STM32智能小车V3-STM32入门教程-openmv与STM32循迹小车-stm32f103c8t6-电赛 嵌入式学习 PID控制算法 编码器电机跟随。
UCOS 嵌入式操作系统是一款在嵌入式领域应用广泛且具有重要地位的实时操作系统,以下是对它的详细介绍。
如果说图像识别是AI的“眼睛”,那么图像生成则是AI的“双手”。AI将成为更懂用户意图的创意伙伴,能够进行持续性的、符合逻辑的视觉叙事(如生成连贯的漫画或视频),并可能在虚拟世界和元宇宙的构建中扮演核心角色。这种智能化处理不仅提升了效率,更重要的是,它让复杂的视觉编辑技术变得大众化,普通用户也能轻松实现过去只有专业人士才能完成的效果。这种跨技术的融合,将使得AI图像处理从一种孤立的技术工具,演变为
随着管理开发的项目体积越来越庞大,产品系统涉及的数据量也越来越多,并且伴随着项目不久就要交付给甲方了。如果项目的数据信息没有被妥善管理,后期设备的运行状态、操作状况等数据流信息不能被溯源,当出现了一些特殊意外时,就会导致对于故障信息不能迅速准确的追踪,甚至会被甩锅、推卸责任,白白当了冤大头。因此对于嵌入式项目中,其产品运行时的数据库建立非常有必要,且是迫在眉睫!!!目前常用的数据库系统有:MySQ
test_proj_empty_nix.pro# The following define makes your compiler emit warnings if you use# any Qt feature that has been marked deprecated (the exact warnings# depend on your compiler). Refer to the d
智能手表里的处理芯片电饭煲的控制系统智能灯控的 Wi-Fi 模块它的特点是资源受限(CPU性能低、内存少)实时性低功耗稳定性高。嵌入式学习是个循序渐进的过程,建议遵循基础 → 驱动 → 系统 → 应用 → 优化的路径。你可以每天安排一定时间动手实验,把知识落实到代码和实物上,这样记得牢,也能更快进入实际项目开发。未来嵌入式会与 AI、5G、边缘计算深度融合,提前打好基础,将有更多施展空间。
在当今科技飞速发展的时代,芯片作为电子设备的核心组成部分,其种类繁多且功能各异。了解不同类型芯片的特点、应用场景以及它们之间的相互关系,对于电子工程师、科技爱好者以及相关行业从业者来说至关重要。以下是关于 CPU、MCU、MPU、SoC、DSP、FPGA 的详细解析及其相互关系,结合核心特性与典型应用场景。
最近做了一个项目,通过 OPC DA 采集发电厂 DCS 的数据并穿过网闸存储到另一个管理区的实时数据库。2、由于采集程序需要长时间运行,OPC DA 仅支持 Windows,所以采集程序基于 Windows 服务运行。这里以采集 KepServer 上的模拟数据为例,直接写入到实时数据库中,演示一个简单的配置过程。1、其中采集服务器和接收服务器上运行的程序需要支持文件缓存,用于应对网络中断时数据
让我来给你举个例子。例如,当你晚上回家时,灯光会自动亮起,温度会自动调整到你喜欢的温度,而这些都是通过嵌入式人工智能技术实现的。由于不需要连接到云,也就是说不需要联网,因此不受网络的限制,其处理速度非常快,而且功耗低。虽然目前还没有嵌入式人工智能的确切定义,但随着人工智能的不断发展,它势必会延伸到边缘、终端和嵌入式市场。总之,嵌入式人工智能是一个非常有前途的领域,它将会在未来的人工智能发展中扮演重
问题:如何从 readthedocs 站点提供静态非图像资产? 我的docs文件夹中有一个assets文件夹,其中包含与我的项目文档相关的图像和示例输入文件。 图像正确嵌入我的文档中,但任何指向示例输入文件(作为我的项目二进制文件输入的静态文件)的链接都是 404ed。 例如,这可能是我的文档中的 reSt 格式文本: Open this `example`_ input file to see
rtdbs
——rtdbs
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 AI Agent技术社区
AI Agent技术社区

 快递鸟社区
快递鸟社区

 openEuler 社区
openEuler 社区


 AtomGit开源社区
AtomGit开源社区
 腾讯云开发者社区
腾讯云开发者社区
 AI硬件创业社区
AI硬件创业社区


 openvela
openvela





 魔乐社区
魔乐社区


 DAMO开发者矩阵
DAMO开发者矩阵


 2048 AI社区
2048 AI社区


 智能体开发者社区
智能体开发者社区






 开源鸿蒙跨平台开发者社区
开源鸿蒙跨平台开发者社区
 智能机器人开发者大赛社区
智能机器人开发者大赛社区



 开源
开源
