




- @weixin_45060125
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
距离的损失函数的功能是通过样本来计算与之间的,在分布差异计算中我们最常见到的是交叉熵,其实还有很多其它的距离定义方法。

FCM聚类算法(matlab编程)function [center, U, obj_fcn] = fcm(data, cluster_n, options)%FCM Data set clustering using fuzzy c-means clustering.%%[CENTER, U, OBJ_FCN] = FCM(DATA, N_CLUSTER) finds N_CLUSTER numb
机器学习—逻辑回归(logistic回归)—二分类逻辑回归作为监督学习的重要方法,使用逻辑回归做分类
虚拟机VMware使用

Git的安装与使用
机器人学基础--位形空间--自由度的计算
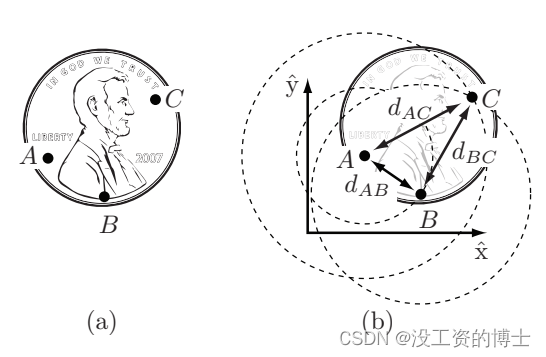
在二维面中,球面(球是三维的,球面是二维的(可由经度与纬度表示))若想变为一个平面,则需要进行切割,故其不是拓扑等效。现在我们将其一般化,假设机器人的位形由n个变量定义,且机器人受到k个独立的约束,那么机器人的自由度为n-k,那么C空间的维度也为n-k,当机器人开始运动时,这些约束对机器人的速度形成了怎样的限制?根据隐式表示,需要三个独立约束条件。• 完整约束也称为可积约束,因为完整约束本质是对速

理解了前面的几个性质之后,我相信我们可以比较轻松的解决这篇文章开头提出的问题了,坐标系{B}由坐标系{A}绕x轴旋转45度得到,旋转矩阵应该怎么写(坐标系{B}与坐标系{A}之间的姿态关系)?因此,更为清晰一点的阐述应该是旋转矩阵R的第一列代表了坐标系{B}的x轴在坐标系{A}的三个轴上的投影。同理我们得到旋转矩阵的第二列代表坐标系{B}的y轴单位向量在坐标系{A}的投影,第三列代表坐标系{B}的

机器人学齐次变换矩阵的性质
