- @abc6838
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
基于MYSQL的学生信息管理系统javaWeb实现耗时20天数据库使用的是MySQL使用了Druid连接池前端使用了html、css、javascript(少量)、jsp页面、servlet和servlet过滤器, 页面包含大量的动画效果后端使用的是java。service层:table包的所有类;dao层:data包的所有类、tools包的所有类。使用了JDBC模板,大大降低了代码重复。所有的s

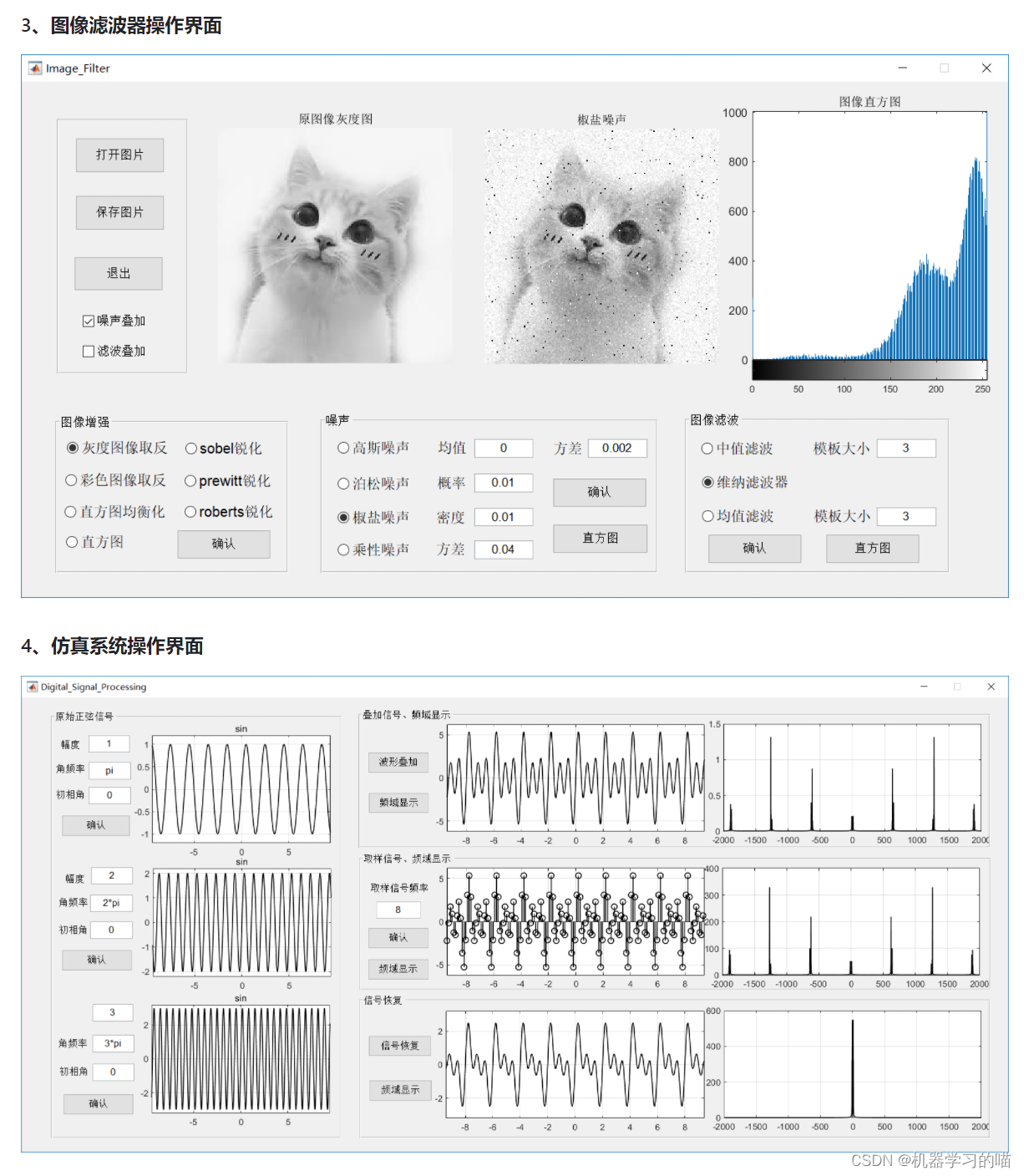
基于MATLAB的数字图像处理演示系统一、设计题目基于MATLAB的数字图像处理演示系统二、设计要求使用MATLAB编程实现仿真系统(包含算法可以是基本信号的显示、基本运算、数字滤波器设计等)。三、设计实现。
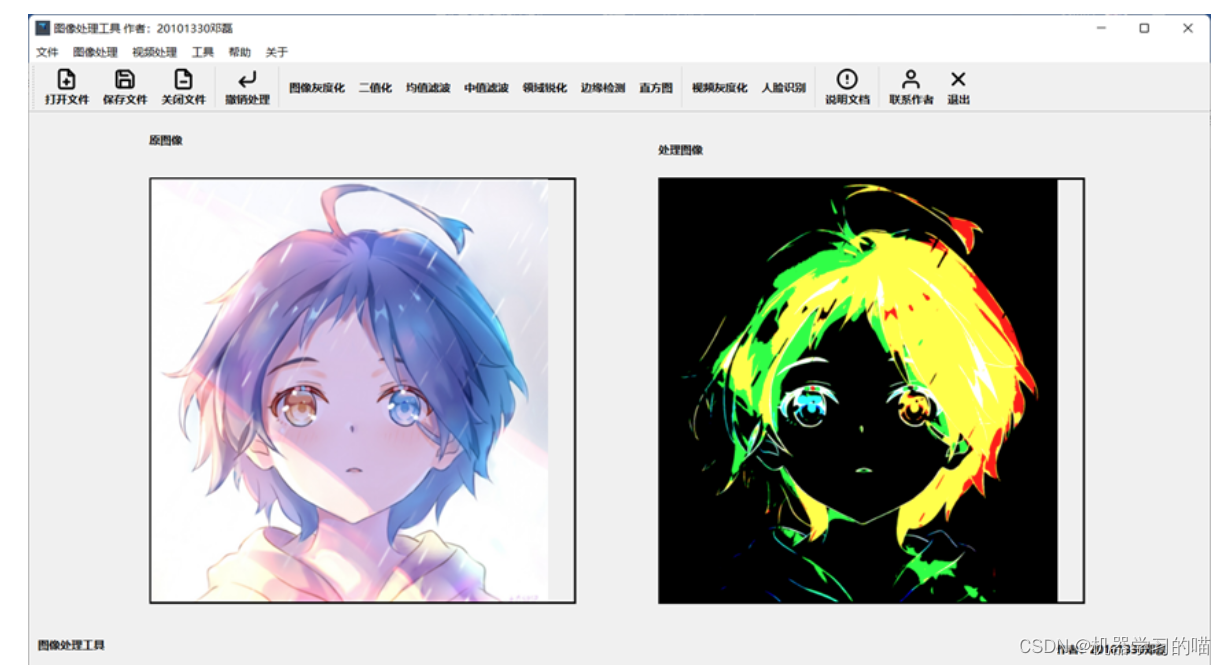
图像工程课程设计 基于 OpenCV 、 Qt 库实现的图像处理软件 大学编程作业(TUST 天津科技大学 2023 年)图像工程课程设计 基于 OpenCV 、 Qt 库实现的图像处理软件 大学编程作业(TUST 天津科技大学 2023 年)一、项目简介二、项目要求三、项目源码四、交流学习图像处理工具说明文档基于 OpenCV 、 Qt 库实现的图像处理软件一、系统介绍(一)编程语言(二)开发软
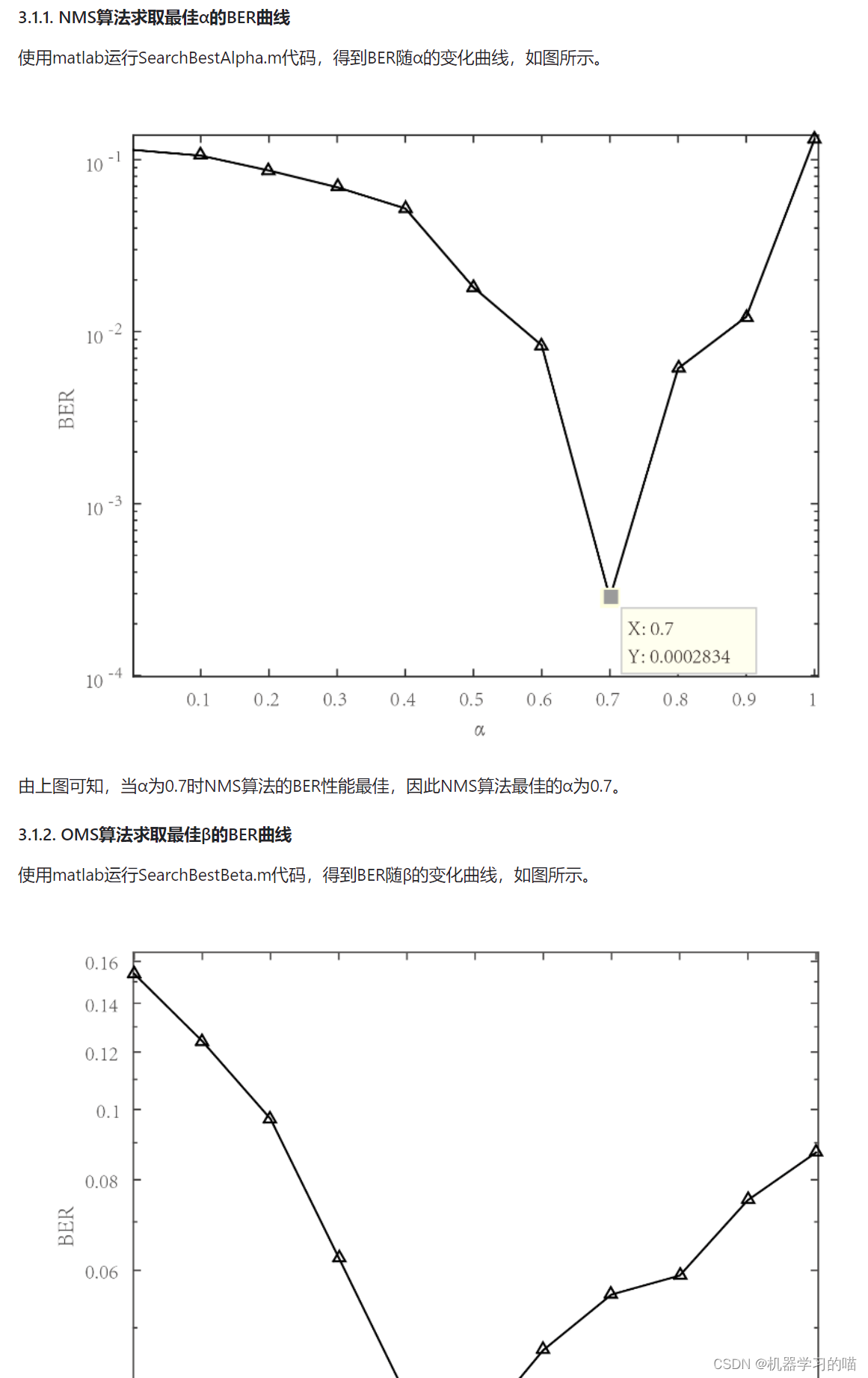
LDPC码背景及概要LDPC是Low Density Parity Check Code英文缩写,意为低密度奇偶校验码,最早在20世纪60年代由Gallager在他的博士论文中提出,但限于当时的技术条件,缺乏可行的译码算法,此后的35年间基本上被人们忽略。直到1993年Berrou等人发现了Turbo码,在此基础上,1995年前后MacKay和Neal等人对LDPC码重新进行了研究,提出了可行的译
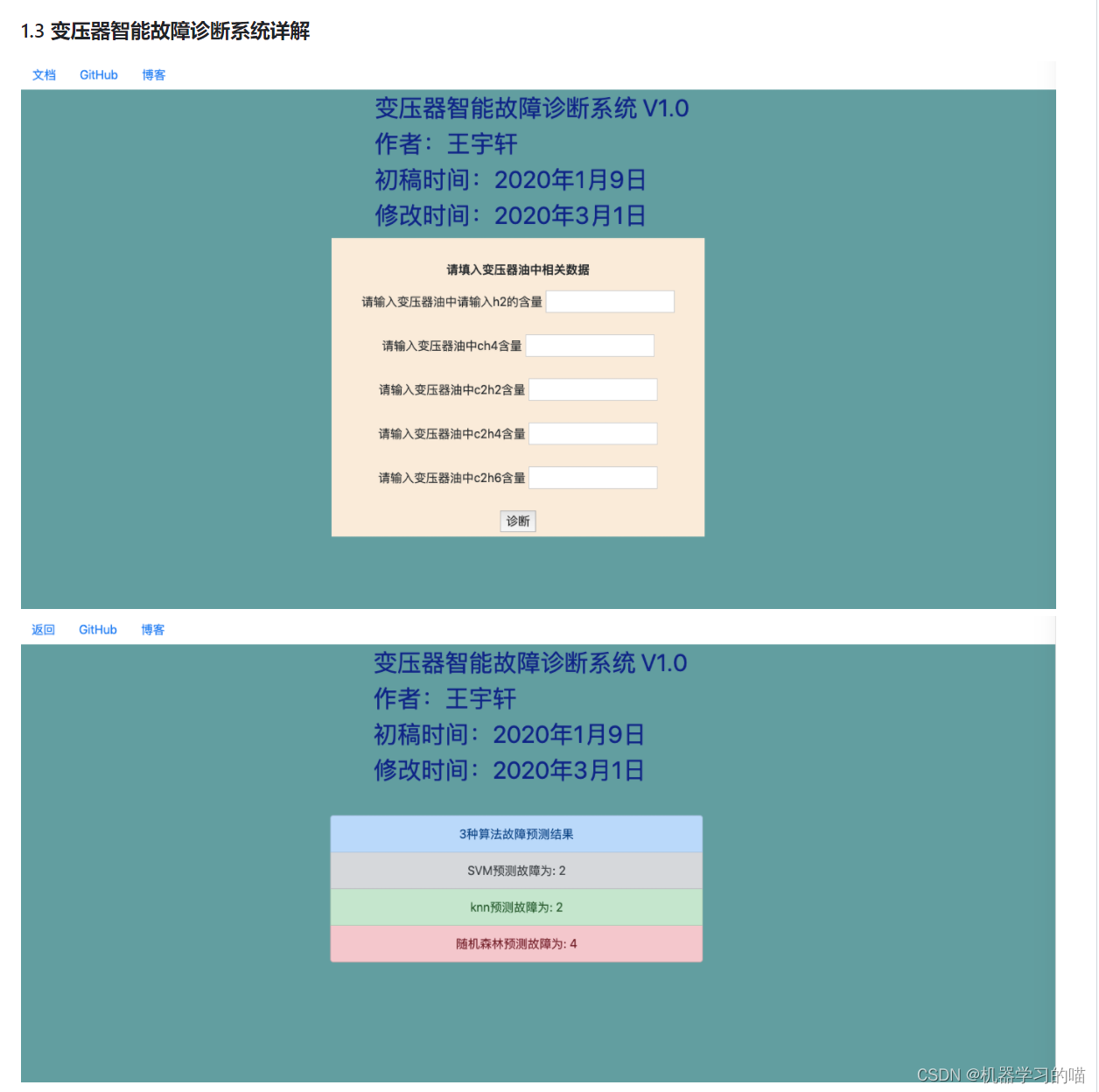
人工智能作业题目:变压器故障诊断系统 V1.0程序讲解1.1 开发环境 macOS mojave 10.14.6 win10和ubuntu测试可用必备的python库各文件夹的作用本软件设计到的框架1.2 本程序分为三个算法:1.3 变压器只能故障诊断系统详解1.4 程序放在我的GitHub https://github.com/sometimesstudy/AIwork 上面,下载指令程序讲解。
全球变化背景下,极端天气和气候事件频发,为了统一不同国家和地区对极端气候事件的定义,世界气象组织(WMO)成立了气候变化检测和指数专家组 (ETCCDI),其给出了 27 个具有代表性的极端气温和降水指数,用于规范全球极端气候事件的研究。数据集存储为.nc(Netcdf)格式,由29个数据文件组成,数据量为1.43 GB(压缩为1个文件,353 MB)。作者利用中国国家级地面气象站基本气象要素日值
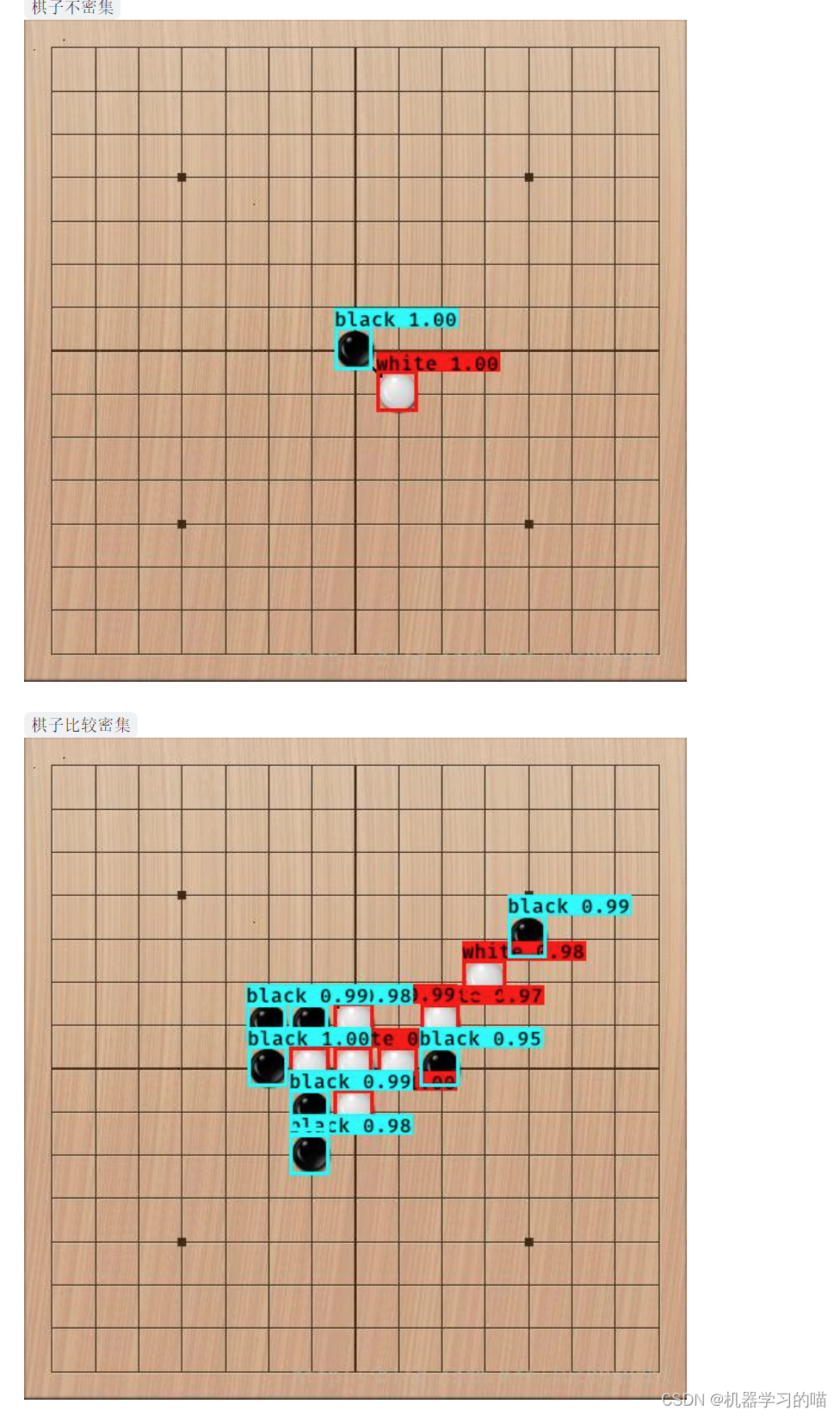
1.研究背景与意义随着教育的发展和普及,学生人数的增加和教师的工作量也随之增加。传统的作业批改方式通常需要教师花费大量的时间和精力,而且容易出现主观评分的问题。因此,开发一种自动化的作业批改系统具有重要的意义。近年来,计算机视觉和深度学习技术的快速发展为解决这一问题提供了新的可能性。OpenCV是一个广泛使用的计算机视觉库,提供了丰富的图像处理和分析功能。而YOLO(You Only Look O

数据处理(构建自己的数据集)由于Chinese-clip库并没有教程构建自己的数据集,这里为了用Chinese-clip库进行微调,将自己构建的数据进行了对齐,其中Flickr8K-CN数据集已经给出(数据来源)。Chinese-clip的图片与文本都有一个id,但是下列给出的数据集并没有id。要用Chinese-clip训练自己构建的数据集,必须满足其库的数据集要求。其中Flickr8K-CN的

数据处理(构建自己的数据集)由于Chinese-clip库并没有教程构建自己的数据集,这里为了用Chinese-clip库进行微调,将自己构建的数据进行了对齐,其中Flickr8K-CN数据集已经给出(数据来源)。Chinese-clip的图片与文本都有一个id,但是下列给出的数据集并没有id。要用Chinese-clip训练自己构建的数据集,必须满足其库的数据集要求。其中Flickr8K-CN的

1、该资源内项目代码都经过测试运行成功,功能ok的情况下才上传的,请放心下载使用!2、本项目适合计算机相关专业(如计科、人工智能、通信工程、自动化、电子信息等)的在校学生、老师或者企业员工下载学习,也适合小白学习进阶,当然也可作为毕设项目、课程设计、作业、项目初期立项演示等。3、如果基础还行,也可在此代码基础上进行修改,以实现其他功能,也可用于毕设、课设、作业等。下载后请首先打开README.md