登录社区云,与社区用户共同成长
邀请您加入社区
开源工作让Soul受到了AI开发者社区和产业伙伴的认可,也让公司在自有场景(App、硬件)之外,探索出了面向B端的新生态——基于情绪感知、语音为先、面向多模态的交互大模型SoulX,在AI 陪伴、具身智能、智能座舱、文娱内容、智能硬件、文旅服务等产业场景开展广泛合作,提供从底层模型到完整交互方案的技术支撑。以实时交互为核心,SoulX 构建了包括语音生成、歌声生成、语音转换、多说话人转录、全双工实
本文提出了一种针对情感陪伴机器人的分层架构解决方案,通过"通用具身OS+自研情感中间件"的双层设计,解决了现有机器人系统在情感交互方面的核心痛点。文章首先分析了2026年主流商用操作系统在情感交互功能上的缺失,指出直接对接会导致动作僵硬、体验割裂等问题。为此,方案采用成熟商用具身OS作为硬件底座,叠加自研四层情感中间件:1)跨层协同适配模块统一上层模型输出;2)情感动力学核心实
《AI数字人助力线下场景智能化升级》摘要:面对线下实体场景人力成本高、服务不均等痛点,AI数字人交互系统正成为创新解决方案。该系统通过7×24小时智能值守、标准化知识库和拟人化交互,有效解决传统接待模式的人力闲置与服务质量不稳定问题。数字人一体机具备快速部署、灵活迭代特性,支持个性化功能调试与内容更新,在降低60%运营成本的同时提升服务规范性。元岳科技等企业通过优化语音识别和语义分析技术,使人机交
具身智能技术现状与未来展望(2026年视角) 2026年被认为是具身智能元年,其核心在于AI通过物理或虚拟实体与环境实时交互,形成感知-认知-行动的闭环学习系统。与传统AI不同,具身智能强调“行万里路”的实践学习,而非仅依赖静态数据训练。目前,具身智能已应用于家庭服务机器人、工业柔性产线、医疗手术及康复设备、自动驾驶等领域。 然而,情感交互型仿生人仍面临诸多挑战:硬件上,高自由度灵巧手、长续航动力
对硕博研究生、青年科研人员而言,学术诚信不是简单道德要求,而是决定毕业、申博、课题结题、职称评审的硬性红线。艾思科蓝面向个人用户与机构客户提供【AI学术诚信检测平台】专业、可信、便捷的一站式检测服务,覆盖文本、AI 痕迹、图像、参考文献四大检测维度,适配 SCI/SSCI/EI 会议、中文核心投稿前自查,提前规避全部学术不端风险。
在“工业大模型 × 数字孪生 × 具身智能”深度融合的重工业级认知型系统(SoI)与高端产品服务系统(AI-PSS)中,智能系统中的人机交互(HCI / HMI)已经彻底超越了消费级软件“被动电子记账”或“静态看板点击”的落后范式。严肃工业现场具有“微米级公差容错率为零、长尾幻觉高风险、控制时延不对称、因果易倒置”的刚性硬约束。
**第五届智能机械与人机交互技术国际会议(IHCIT2026)将于2026年8月21-23日在中国成都举行。**会议由西南石油大学等机构主办,聚焦人工智能、机械工程、人机交互等前沿领域,涵盖智能机器人、算法学习、云计算等热门主题。往届会议论文均被EI核心和Scopus数据库稳定收录,2025届仅用3.5个月完成检索。投稿论文将经严格评审,由IET出版社出版(ISSN: 2732-4494),并提交
四足机器狗凭借仿生运动结构与复杂地形适应能力,在电力巡检、公安安防、消防救援、园区巡逻等场景中快速渗透。然而,在实际部署中,四足机器狗的运动控制面临着诸多挑战:需要在高频振动和剧烈姿态变化中保持稳定控制,需要同时协调12个以上关节电机的精准同步,还需要在紧凑的机身内部署高性能控制器——空间每寸都很宝贵。以下为具身智能机器人控制器TER30R-A2在边防巡检机器人中的应用实践。
-- ### 第二,它区分了“说出来的内容”和“内部可用的内容” 这一点很关键。也就是说: ### Claude 的 J-space:内部神经表示层面的工作区 ### S-44 的 z_self / 记忆 / 规则:外部系统层面的持续自我架构 如果类比人: - J-space 像“此刻脑内被照亮、可以说出来的思想场”;- 输出中的自我解释;--- 一句话总结: Anthropic 的 J-spac
本文深入探讨了ROS2 AGV自动充电视觉对接系统的全链路重构过程,揭示了从实验级到工业级的技术挑战与解决方案。作者系统分析了四大核心问题:TF坐标树断层、Nav2导航死循环、算力瓶颈和物理摩擦陷阱,并提出了创新解法:强制3D唤醒、2D降维导航、动态资源管理和微步寸动策略。通过重构后的"粗导航+视觉精调+闭环倒车"架构,实现了系统稳定性和精度的显著提升。文章强调机器人开发不仅是算法实现,更是系统工
本文将介绍一个直观的"风险-治理坐标系"框架,帮助程序员在复杂多变的AI应用场景中快速定位风险等级,制定相应的治理策略,确保代码质量和系统安全。
LLaVA-Plus是LLaVA系列的最新升级版,作为多模态Agent实现了工具自由调用与性能突破。它通过智能规划和整合视觉生成、交互、理解等工具库,完成复杂任务,性能接近GPT-4。相比前代,LLaVA-Plus具备更强的工具选择与规划能力,支持"全工具"和"飞速"两种训练模式,7B规模模型即可高效运行。实验显示其在OCR、空间感知等任务上有显著提升,标志
自主话术生成引擎让用户只需用自然语言描述业务需求,系统即可基于行业知识库与最佳实践,通过深度思考和联网检索自动生成对话指令。电商场景中,AI能根据促销策略动态生成个性化话术,覆盖“商品推荐-库存查询-订单确认”全流程。
机器人人机交互系统、人机协同决策系统、触觉/手势交互系统、语音交互智能系统、人机交互界面系统、情感化人机交互系统、虚拟现实人机交互系统、增强现实交互系统、人机交互系统可用性评估、人机交互系统集成设计、车载人机交互系统优化、人机交互认知建模系统、智能终端人机交互系统、人机交互系统安全防护、柔性电子人机交互系统等。会议将深入探讨人工智能算法、机器学习、自然语言处理等智能计算技术,及其在下一代人机交互界
摘要: 本文探讨了将大语言模型(LLM)与ROS2导航系统融合开发具身智能的关键挑战与解决方案。针对LLM指令控制问题,提出了Few-Shot示例前置方法绕过安全限制;对ROS2节点调度问题,采用多线程守护进程模式避免误杀;在SLAM定位中通过调整参数释放雷达纠偏能力;针对硬件同步问题,采用软件撮合策略;最后提出三段式工业充电方案,结合粗定位、视觉精调与物理补偿实现高精度对接。文章强调具身智能开发
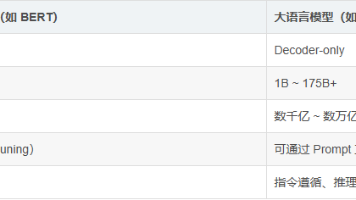
本文系统介绍了大语言模型(LLM)的定义、核心能力及训练流程。LLM是参数量巨大的语言模型,具备涌现能力、上下文学习、指令遵循和逐步推理四大特性,能够处理多语言和长文本,但也存在幻觉问题。文章详细解析了LLM的三阶段训练过程:预训练、监督微调和人类反馈强化学习,并指出未来发展方向是更小高效的模型和更安全的对齐技术。
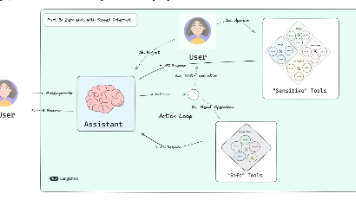
我们的图状态和 LLM 调用与上一章几乎相同,但有一个例外:我们添加了一个user_info字段,它将在图开始时就被填充,我们可以直接在助手对象中使用状态,而不是使用可配置参数。# 定义状态user_info: str # 新增:用户信息字段# 定义助手类# 如果 LLM 恰好返回空响应,我们会重新提示它给出实际响应):else:break# 配置 LLM# 定义助手提示词"system",),#
数据类型分为值类型和引用类型,值类型如int、double、bool等直接存储数据,而引用类型如string、数组、类等则存储对数据的引用。运算符包括算术运算符(+、-、、/)、比较运算符(==、>、<)和逻辑运算符(&&、||、!面向对象编程(OOP)是C#的核心范式,基于类(Class)和对象(Object)的概念。类是一种蓝图,定义了对象的属性和方法,而对象是类的实例。继承(Inherita
谷歌DeepMind发布的Gemini 2.5 Computer Use模型突破性实现了AI直接操作GUI界面的能力,使AI能像人类一样通过点击、输入等动作完成网页和移动应用任务。该模型采用四步循环交互系统,支持跨分辨率操作,在多项基准测试中表现优异。其视觉理解特性尤其颠覆了传统UI自动化测试领域,解决了脚本脆弱性问题,谷歌支付团队已成功用其修复60%失效测试用例。模型内置多重安全机制,要求高风险
Agentic AI(智能体AI)与传统AI有何本质区别?它将如何改变我们与机器互动的方式(人机交互)?我们会用“生活故事+代码实战+趋势分析”的结构,覆盖Agentic AI的核心概念、工作原理、实际应用,以及对未来人机关系的影响。故事引入:用“智能导航的进化”让你立刻理解Agentic AI的价值;核心概念:用“智能管家”比喻拆解自主性、适应性、协作性;原理架构:用流程图和代码展示Agenti
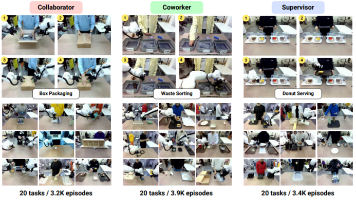
摘要:Franka Research3(FR3)七轴力控机械臂被用于构建HABIT人机交互数据集,通过双臂协同完成协作、并行和指令引导三类任务,采集了10563段交互数据。研究采用VR遥操作控制,确保动作由人类视觉触发,并通过多样化场景设计降低过拟合风险。实验表明,基于人机交互数据训练的模型在避让、同步等任务上表现更优,且迁移学习效率更高。该数据集为共融环境中机器人行为研究提供了重要资源。(149
近日,阶跃星辰推出的系列模型凭借其创新的端到端架构与多项SOTA性能,为多模态语音领域注入新动能。作为开源语音大模型的重要突破,该技术不仅实现了音频理解与生成的深度融合,更在情感交互、工具调用等维度展现出惊人潜力。
在万物互联与智能化浪潮的推动下,传统语音识别技术面临环境噪声干扰、方言口音差异、专业术语理解等多重挑战。AI 智能语音识别系统通过融合深度学习、声学建模与语言理解技术,构建了高精度、强鲁棒、自适应的智能语音交互体系,实现了从"听得见"到"听得懂"的质变突破。探索低资源语言的零样本学习,推动技术普惠,最终构建具备人类水平理解能力的下一代语音交互系统。例如在医疗会诊场景中,系统不仅能准确识别"急性心肌
这种高拟真度的合成音,能够根据不同的场景和语境,灵活调整语气和节奏。在与客户进行商务沟通时,它会采用专业、稳重的语气;而在进行产品推广时,则会切换为热情、富有感染力的语调,让客户更容易产生共鸣,增强了语音交互的亲和力和吸引力。
自然语言处理(NLP)是人工智能和语言学领域的一个分情感分析是NLP的另一个应用领域,它涉及到识别和提取文本中的情感倾向,如积极、消极或中性。通过使用大量的双语文本数据,机器学习模型可以学习如何将一种语言翻译成另一种语言,尽管仍然存在准确性和流畅性方面的挑战。总的来说,NLP是一个不断发展的领域,它正在逐步解决语言的复杂性问题,并在多个行业中发挥着越来越重要的作用。随着研究的深入和技术的进步,我们
本文探讨了具身交互智能作为下一代人机交互入口的重要性,通过魔珐星云技术实现500ms端到端响应的IVR语音导航系统。文章分析了纯文本Agent的三大痛点,提出具身Agent(数字人形象+实时语音交互+业务逻辑)的解决方案,并详细介绍了技术架构(WebSocket代理+PCM音频流)和核心代码实现,包括鉴权模块和TTS服务。该项目展示了如何将生硬的IVR系统升级为有温度的拟人化交互体验,为AI Ag
人机交互
——人机交互
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 人工智能6S服务平台
人工智能6S服务平台


 openEuler 社区
openEuler 社区


 AI Agent技术社区
AI Agent技术社区

 DAMO开发者矩阵
DAMO开发者矩阵


 亚马逊云科技技术品牌专区
亚马逊云科技技术品牌专区



 DeepSeek技术社区
DeepSeek技术社区
















 龙虾开发者社区
龙虾开发者社区

