- @qq__487739278
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
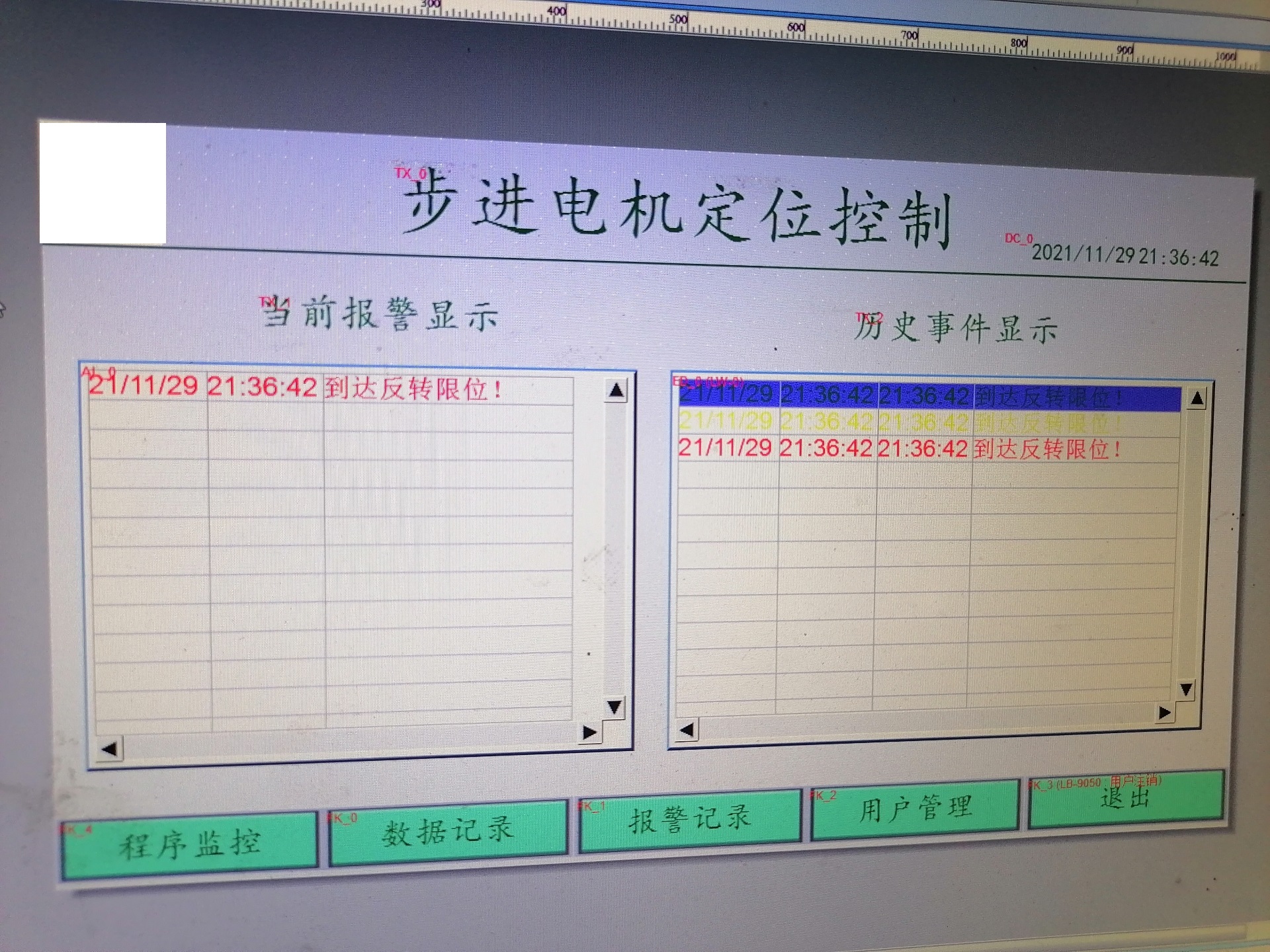
这些模块组合起来,再配上RabbitMQ做消息队列,一个基础版的工业检测系统就搭起来了。实测在i5-8500的工控机上跑,处理500ms的超时控制完全没问题。不过千万记得要把所有图像处理放在单独的工作线程,不然界面分分钟卡成PPT——别问我怎么知道的。有次现场调试就因为没处理这个,全屏显示跑到工程师的笔记本主屏去了,产线显示器反而黑着...搞定了全屏显示才发现WPF才是真香,WinForm的全屏方
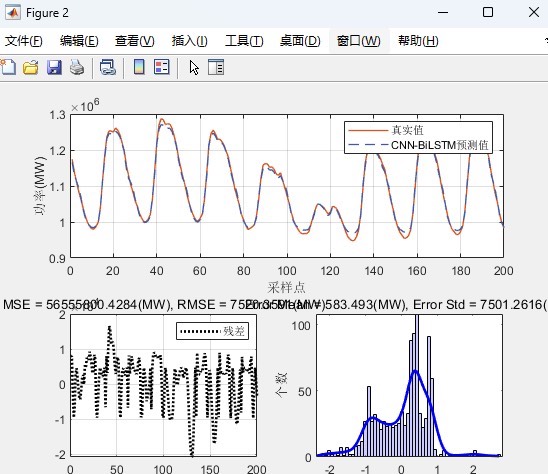
这个模型把卷积的局部特征抓取、BiLSTM的双向时序理解和自注意力机制的权重动态分配揉在了一起,在电力负荷、光伏功率这些波动明显的场景下特别好使。自编基于层结构(Layer)的添加自注意力机制(Self Attention)的卷积连接Bi-LSTM(CNN-BiLSTM)单/多输入--单输出时序预测(SATT-CNN-BiLSTM),可预测负荷、环境预测、光伏预测、功率预测等数据。实测在某个光伏数
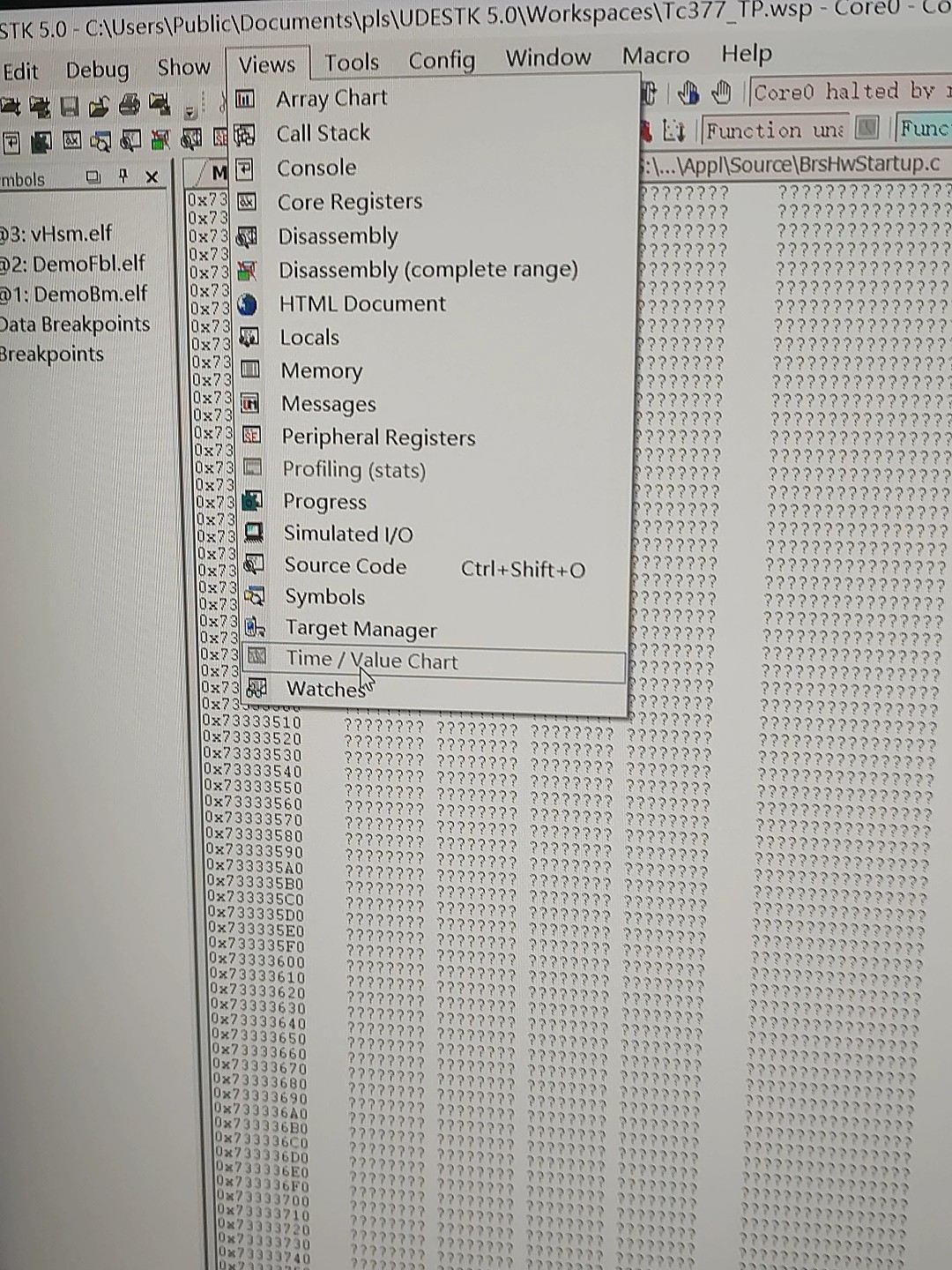
最近在折腾英飞凌的TC387芯片,实验室那套4万块的正版调试器被师兄锁在保险柜里,翻仓库找到个落灰的miniwiggler调试器。(miniwiggler驱动官方下载:https://www.infineon.com/cms/en/product/promopages/das/ 别下到Cyclone V版本!本软件用于小白基础上手,可正常下载,watch,local,memory,register
标签管理模块通过「参数-模板-打印」模型,把传统硬编码的标签格式彻底数据化。二次开发时,90% 需求只需修改配置或增加字典项,真正需要编码的场景集中在驱动层新打印机适配。理解上述流程与代码骨架后,可在 1-2 小时内完成新标签上线,显著降低交付成本。C# Winform通用开发框架,支持多语言,多数据库,自动更新,模块化,可用其开发任意CS端系统,非常适合需要快速搭建项目的团队或个人使用。
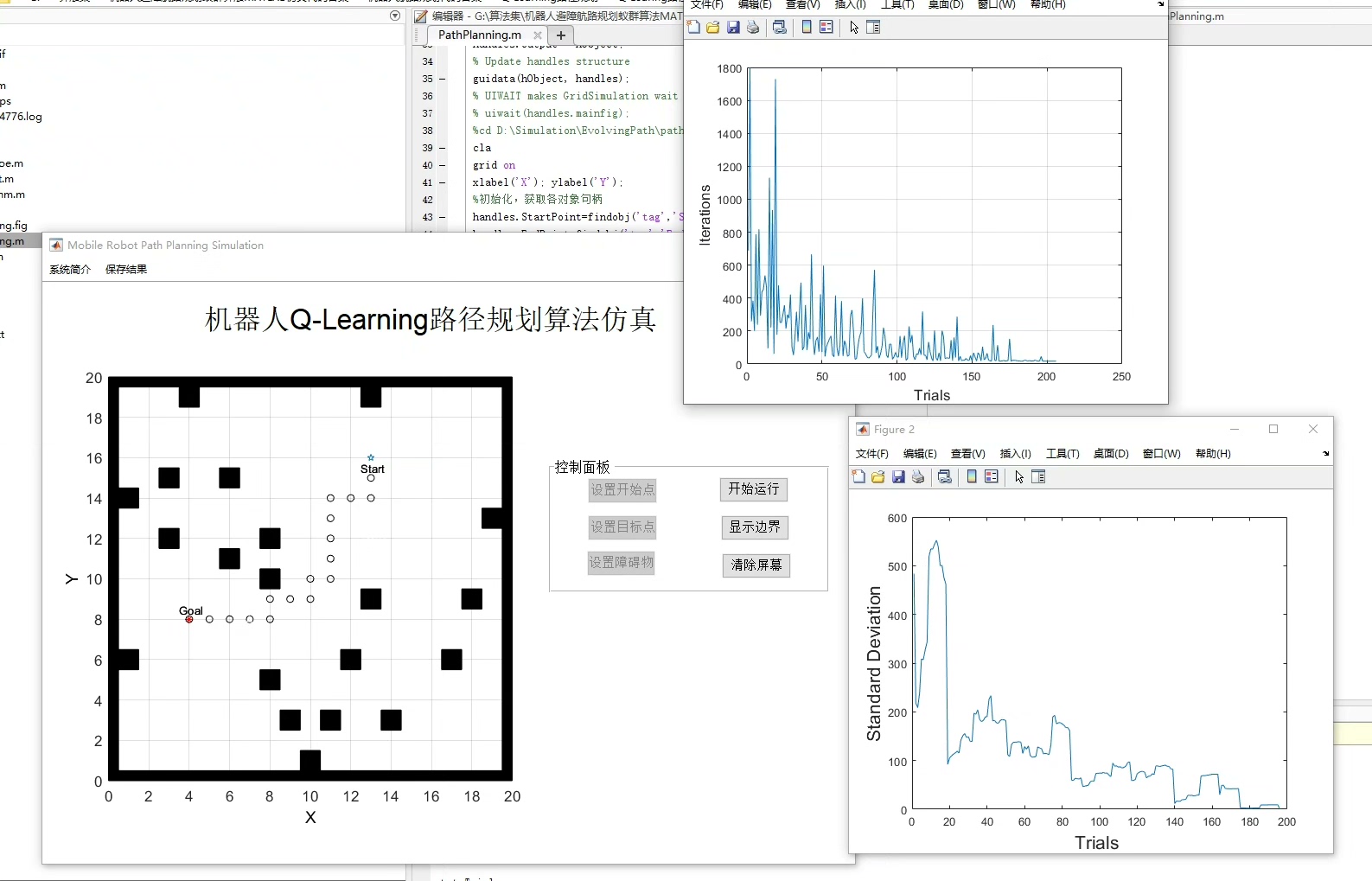
先想象一个场景:你的扫地机器人卡在沙发和茶几之间疯狂转圈,这时候它需要的不是更猛的电机,而是一个能自己规划路径的大脑。Q-learning就是帮机器人长脑子的算法之一,咱们今天不聊公式,直接撸代码看看这玩意儿怎么让机器人学会绕开障碍物。这个实现虽然简化(比如没考虑动态障碍物),但已经揭示了Q-learning的核心思想:通过试错建立环境地图,用奖励机制引导学习方向。比如在咱们的设定中,机器人可能会
今天分享的这套方案支持市面上八成主流伺服,从正点原子探索者到自制核心板都能跑,实测同步周期最低能压到1ms(别嫌慢,够用才是王道)。有特别想适配的伺服型号留言,下期优先安排解剖。随便找块带RMII接口的STM32F4/H7板子,我用的是正点原子探索者直接插网线。可配合汇川IS620N、埃斯顿ProNet、迈信EP3E、台达A2-E、伟创SD700、松下A5B/A6B和欧姆龙G5系列驱动器使用,或提
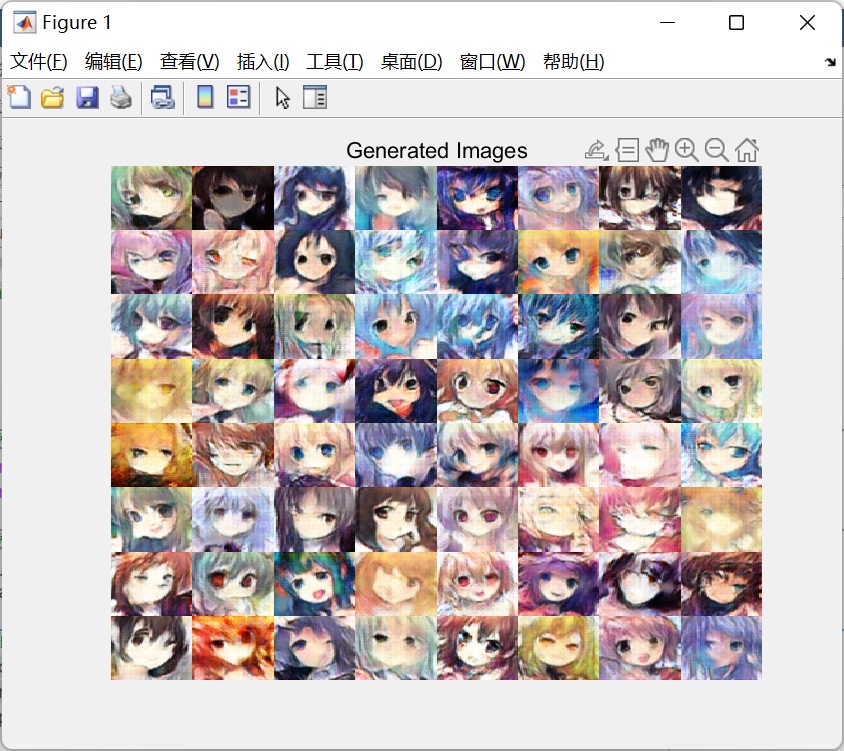
生成器的任务是接收一个随机噪声向量,输出一张图像。这里用了来实现反卷积操作,也就是上采样。最终输出的图像大小是28x28,和MNIST数据集里的图像大小一致。判别器的任务是判断输入的图像是真实的还是生成的。判别器最后用了一个,输出一个0到1之间的值,表示图像为真的概率。DCGAN的实现其实并不复杂,关键是要理解生成器和判别器的博弈过程。通过不断调整网络结构和训练参数,我们可以生成越来越逼真的图像。
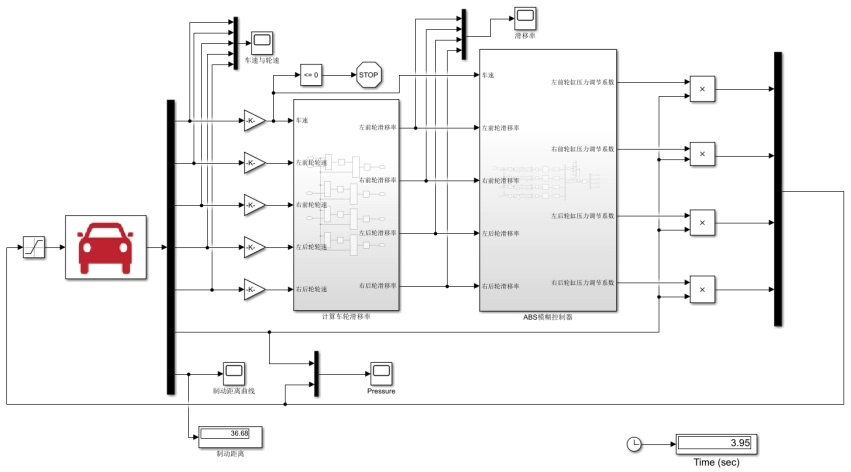
通过这次仿真研究,我对ABS控制有了更深刻的理解。模糊控制在多工况下的表现确实优于传统逻辑门限值控制,尤其是在应对复杂路面条件时,其平滑性和适应性更加突出。不过,模糊控制也有一定的局限性,比如规则库的设计需要有一定的经验和试错过程,而且在实时性方面可能不如一些优化的PID控制算法。当然,这只是初步的研究,后续还可以进一步优化模糊规则,或者引入其他智能算法,比如神经网络,来提升控制效果。总之,这是一
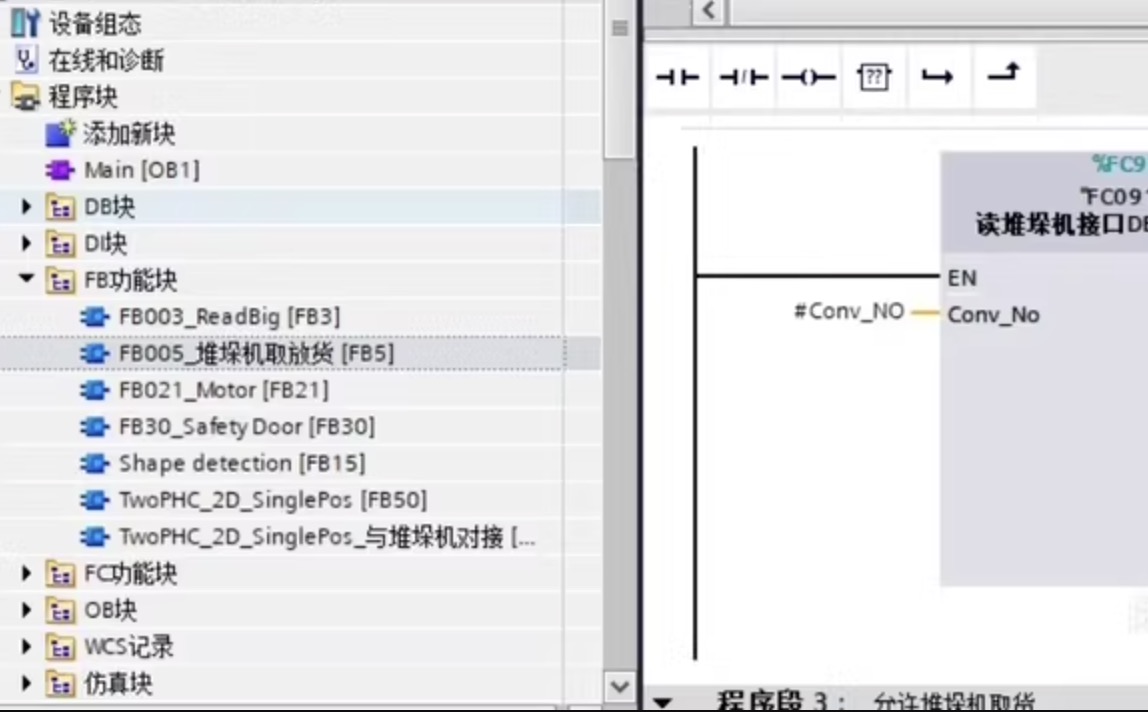
通过西门子1500 PLC和S7-1200 PLC的组合使用,以及博途V16编程软件的编程实现,项目最终在电脑上进行仿真测试并通过实际项目的验证。本项目的核心目标是实现西门子1500 PLC在仓储物流立体仓库的自动化控制,其中涉及到通信、算法、运动控制等多方面技术的整合。项目要求涵盖通信功能,算法运算,运动控制,以及屏幕可进行电脑仿真测试,最终形成一个实际项目的完整程序。同时,项目附带详细的图纸设
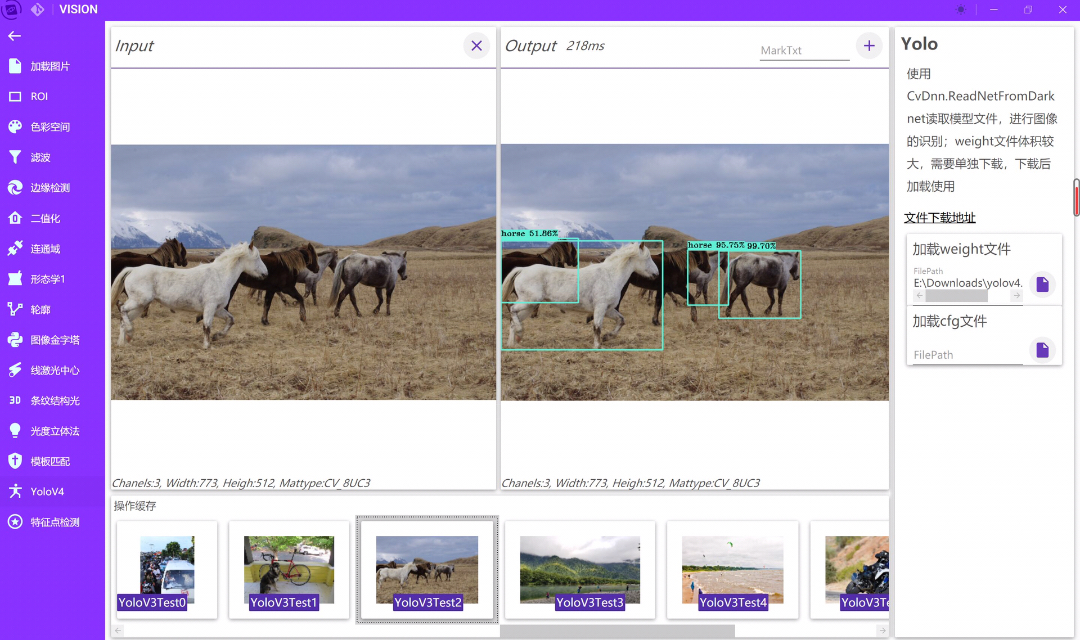
这是一个使用.net 6 基于wpf 、OpencvSharp(opencv的.net wrapper)、ReactiveUI等开发的自用工具,主要用来做ReactiveUI与OpencvSharp学习过程中的尝试以及opencv算子参数的调试等,该程序还可以显示3D点云数据(目前程序中的点云数据是由格雷码条纹拍摄的照片反算生成了,还可以导入标准的3d格式的文件stl、obj、objz、ply、3