登录社区云,与社区用户共同成长
邀请您加入社区
本文提供了在openEuler 22.03 LTS系统上部署Ansible控制节点的完整指南,主要内容包括: 基础环境准备:更新系统、关闭SELinux和防火墙、安装Python3等依赖 Ansible安装:通过dnf或pip安装不同版本 配置Ansible:编辑ansible.cfg和主机清单文件 SSH免密登录配置:提供多种公钥分发方法 被控节点准备:安装Python3等基础依赖 连通性测试:
本文详细介绍了使用Ansible自动化部署Nginx的完整流程。主要内容包括:1)环境准备,包括控制机和被管理节点配置;2)Ansible安装与SSH免密认证设置;3)创建标准化的Ansible项目目录结构;4)编写各类配置文件(ansible.cfg、主机清单、变量文件等);5)编写角色任务(系统初始化、Nginx安装配置);6)执行部署并验证结果;7)安全加固措施。文档提供了完整的playbo
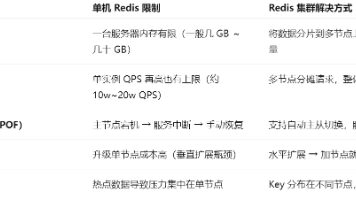
本文介绍了使用Ansible快速搭建Redis集群环境的步骤。首先说明了Redis集群的主要优势和适用场景,强调其不适合替代数据库系统。然后详细描述了准备过程:配置主机清单和ansible.cfg文件,设置远程主机访问权限,创建Redis角色并编写任务(包括安装依赖、编译安装Redis、配置服务等)。最后通过playbook调用角色完成部署。配置文件中重点修改了bind地址、启用集群功能等关键参数
文章摘要: 本文介绍在openEuler 24.03系统上搭建Ansible环境的完整流程。首先建议更换yum源以解决夜间网络延迟问题,提供了163和华为云的镜像配置示例。随后详细说明三台虚拟机的环境准备,包括关闭防火墙、配置主机名和hosts文件、安装Python等基础操作。重点在控制节点(k8s-master)上安装Ansible,配置SSH免密登录,并编写包含master和node分组的in
安装的kubernetets版本为1.28.5,Calico版本为3.26.4,容器运行环境为containerd。
本文详细介绍了使用Ansible部署Kubernetes集群的完整流程。针对Linux新手虚拟机安装指南(含VMware配置步骤和系统安装教程),以及面向有一定基础用户的k8s部署方案。文章特别提示了实验环境与生产环境的密码设置差异,并提供了大量的参考信息。全文附带大量截图指导,从虚拟机创建到系统配置都有详细说明,适合不同基础水平的读者参考学习。
在大数据时代,Hadoop 已成为构建分布式存储与计算平台的核心组件。传统手动部署 Hadoop 集群不仅繁琐且易错,而借助 Ansible 这种无代理自动化工具,可以极大提升部署效率、统一配置并便于日后运维管理。A5数据的本篇教程适合运维工程师 / 大数据开发工程师阅读,通过 Red Hat Enterprise Linux (RHEL 8.x/9.x) 服务器环境,使用 Ansible 自动化
Ansible故障排查指南摘要:本文系统介绍了Ansible自动化运维中的故障排查方法。针对Playbook问题,提供了日志分级调试、变量核查、语法检查及工件溯源等解决方案;针对受管主机问题,重点分析了连接认证、地址解析、特权升级等常见故障,并推荐使用检查模式和临时命令进行预验证。核心排查思路强调先定位问题维度(Playbook或主机),再通过专用工具逐层分析,包括-v调试选项、debug模块、语
本文将基于 Ansible 工具,重点围绕Jinja2 模板部署、Block-Rescue 异常处理、Playbook 整合(import) 三大核心知识点,实现 Web 服务器的自动化部署、配置,以及访问结果的验证与异常记录。
本文记录了在Kubernetes集群上搭建自动化运维体系的实践过程。通过在master节点部署Ansible批量管理工具,在node1节点创建Zabbix专用数据库,并完成Zabbix Server的安装配置。重点解决了Zabbix 6.0版本SQL文件导入、PHP版本升级(从5.4到7.4)、Apache配置修正等一系列技术难题,最终成功启动Zabbix监控系统并访问Web界面。文章详细记录了每
在 Declarative Pipeline 中,使用parameters指令定义参数列表,必须放在pipeline块下,且只能出现一次。
摘要:本文记录了Zabbix Server 6.0启动失败的完整排查过程。实验环境采用三节点架构,发现Web界面显示服务未运行。主要问题包括:1)MySQL 5.7版本不兼容(需升级至8.0);2)升级后日志缓存旧版本信息;3)systemd服务文件用户配置错误(zabbixsrv应改为zabbix)。通过MySQL升级、日志清理和服务文件修正,最终解决了服务启动问题。整个排查涉及数据库版本、日志
Jenkins + Ansible 集成实战:把配置管理焊进流水线里
yamlyamlvars:port: 80现象原因解决方案官方 Docker 源慢 / 失败境外源被限速✅ 替换为阿里云镜像Playbook 执行失败repo 未生效明确指定版本不对未锁定版本使用docker_ver变量SSH 不通没做免密先ping 不通Inventory 写错检查 IP 和组名。
hostvars是 Ansible内置魔法变量,不需要定义、不需要赋值,直接用。作用只有一句话:让当前执行任务的机器(比如 Worker1),读取 inventory 里任意其他机器(比如 Master)的所有变量、 Facts、注册值。直白翻译:你在 Worker 上执行任务,但你能读到 Master 的变量!这就是解决 K8s join 最核心的神器。hostvars = 跨主机取变量的魔法任
返回 pong(SUCCESS):全部验证通过,主机可正常被 Ansible 管理。FAILED:能连上 SSH,但被控端缺少 Python,无法执行模块。重新加载 Ansible 控制机和被控机的SSH 服务,使密码认证生效。在 Ansible 控制机上,把本机 SSH 公钥拷贝到被控机。临时开启 Ansible 控制机和被控机的SSH 密码认证。在 Ansible 控制机上安装 ansible
我手头有几台小 VPS,跑一些自己的副业项目。
执行ssh-keygenk8s-node1。
Ansible-NAS是一个基于Ubuntu、Ansible和Docker的家庭服务器解决方案,旨在简化NAS搭建过程。通过配置文件即可部署100多种应用(如Jellyfin、Nextcloud等),无需手动操作。项目不自动化磁盘分区,需用户自行处理,支持Ubuntu Server 22.04 LTS。适合想简化家庭服务器配置或从Docker Compose迁移的用户,提供灵活选择而非强制预装方案
整体来说,Argo CD 不只是一个自动部署工具,它是一套标准化的云原生运维交付规范落地载体。依托 GitOps 实现了环境可复现、变更可追溯、集群自修复,把 K8s 所有资源代码化,适配我项目里 AI 智能运维平台这类长期迭代的云原生应用;同时这套方案可以直接复用在企业生产环境,降低集群维护成本,减少人为操作故障。
本文介绍基于Ansible的Kubernetes 1.28.15离线部署方案,主要特点包括: 提供Gitee源码仓库(https://gitee.com/wxd_ops/k8s-1.28-ansible-offline),包含完整的Ansible playbook和角色配置,但不包含约3GB的离线镜像包等大文件。 支持多种部署模式: 单Master+Worker部署 三Master高可用集群(内置
Grafana 作为专业可视化中间层,补足了 Prometheus 可视化薄弱的短板,依托多数据源、交互式变量、海量社区看板三大优势,成为 K8s 集群标准观测工具。在我的 AIOps 项目中,它可以直观展示 Pod 崩溃、节点资源过载等异常指标,配合 Prometheus 告警、自研 SRE Agent,形成一套完整的 “监控 - 告警 - 可视化 - 自动自愈” 运维闭环。
本文介绍了geerlingguy/ansible-role-firewall这个Ansible Role,它能自动化配置基于iptables的Linux防火墙。该工具已在GitHub获得581星,支持IPv4/IPv6,通过变量声明开放的TCP/UDP端口、端口转发和自定义规则,并创建可管理的init服务。角色设计简洁,采用声明式配置,适合中小规模运维团队统一管理服务器防火墙。文档详细,变量覆盖全
我们发布了30条针对Ansible剧本、Java/Kotlin代码、Shell脚本和Docker Compose配置文件的Semgrep规则。提示:如需定制规则,可联系Trail of Bits团队。所有规则已加入公开的。完整规则列表涵盖未加密网络传输、SSL验证禁用、命令行工具不安全标志等问题。更多精彩内容 请关注我的个人公众号 公众号(办公AI智能小助手)
本文提供了一套完整、可落地的基于 DeepSeek 大模型的 AIOps 智能运维平台实施方案。内容涵盖技术架构设计、开源组件选型(vLLM、Milvus、Prometheus)、详细的 Kubernetes 部署脚本、RAG 知识库构建、日志和告警分析的核心 Python 代码示例,以及与 Ansible 的集成,旨在为希望在生产环境中实践 AIOps 的开发者和 SRE 工程师提供一份详尽的技
Java线程池是java.util.concurrent包中提供的一种强大的线程管理机制,它通过复用一组预先创建好的线程来执行任务,从而避免了频繁创建和销毁线程所带来的性能开销。当工作队列(workQueue)已满,且当前线程数小于maximumPoolSize时,线程池会创建新的线程来处理任务。当线程池中的线程数量超过核心线程数时,多余的空闲线程在等待新任务的最长时间。因此,提交的任务会直接尝试
需要注意的是,标记为async的方法通常返回Task、Task<T>或ValueTask<T>类型,void返回类型仅适用于事件处理程序。C#通过async和await关键字提供了直观的异步编程模型,使得编写异步代码在语法上接近于同步代码,降低了开发者的心智负担。TaskCompletionSource类提供了手动创建和控制Task对象的能力,适用于将基于回调的旧式异步API转换为基于Task的现
此 Playbook 遵循幂等性原则,可安全重复执行。在 Playbook 中通过。
将 LAMP(Linux + Apache + MySQL + PHP)部署拆分为独立角色,可显著提升代码复用性和可维护性。以下是实战步骤:使用初始化角色骨架:生成标准结构:(1)Apache 角色 ()(2)MySQL 角色 ()(3)PHP 角色 ()(1)全局变量 ()(2)敏感变量加密使用加密密码:依赖管理条件触发通过实现动态控制:跨平台支持使用变量适配不同系统:通过角色拆分,可实现:
开发 Ansible 模块是提升自动化效率的关键。通过本指南,您可以创建自定义模块来处理运维任务。实践中,从简单模块开始,逐步扩展功能。参考 Ansible 官方文档(如)深入学习。遇到问题时,使用查看现有模块源码作为参考。
核心思路是。
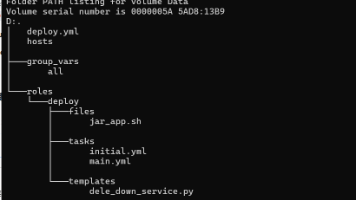
本文介绍了一个基于Ansible的Java应用部署方案,通过200行YAML和一个Shell脚本实现了幂等初始化、版本管理和服务生命周期管理。方案采用以下核心设计: 目录结构设计: 使用package、runtime、backup、rollback四个目录实现版本管理 通过权限分层(0755/0750)保障安全性 幂等性保障: stat检测+条件include实现初始化与更新的分离 lineinf
Helm 解决了原生 K8s YAML 难以批量维护、多环境适配、版本回滚困难的痛点,是云原生应用标准化交付的基础工具。在我的三节点 K8s 实验项目中,依托 Helm 快速落地完整监控体系,同时结合 ArgoCD 实现标准化 GitOps 流程,整套方案完全可以复用到企业生产环境,降低复杂中间件的部署与维护成本。
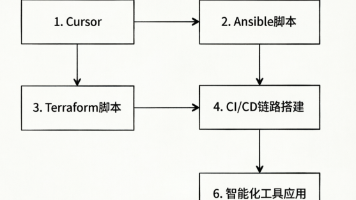
摘要 在传统开发运维中,手动编写Ansible/Terraform脚本和配置CI/CD链路存在效率低、易出错等问题。Cursor作为智能编写工具,能够自动生成脚本代码,并通过补全功能提升编写效率与质量,同时简化CI/CD工具集成。研究表明,Cursor可显著减少手动工作量,降低语法错误率,优化部署流程,对提升自动化运维效率具有重要意义。 关键词: Cursor;Ansible;Terraform;
基础设施需求写成Markdown放到Git仓库,Cursor根据模板生成Terraform代码和Ansible Playbook,提交后触发GitHub Actions跑terraform plan和ansible-lint。真正执行前,人只做一件事——Review代码。
本文总结了使用Ansible管理多版本Python环境的实战经验,重点解决了版本兼容性问题。文章首先描述了混合云环境下的自动化需求,详细记录了从Ansible安装、主机配置到遇到的ModuleNotFoundError和SyntaxError等典型问题的排查过程。针对不同Python版本(2.7/3.6/3.12)的兼容性问题,提出了两种解决方案:回退到Python2或升级Python3版本。最后
Ansible 是一款基于 SSH 的无代理自动化工具,其核心原理依赖目标主机的提权机制(如 sudo)和 Python 运行时环境。在 Ubuntu 20.04 这一广泛使用的 LTS 系统中,因默认 sudo 配置要求 TTY、系统 Python 3.8 与新版 Ansible 模块存在 ABI 兼容性问题,常触发 'waiting for privilege escalation promp
本文探讨了如何将AI驱动的Cursor代码编辑器与GitOps自动化运维模式相结合,以优化基础设施即代码(IaC)的编写和部署流程。文章首先回顾GitOps的核心原则,强调其以Git为单一可信源、声明式配置和自动化同步的特点。重点介绍了Cursor如何通过智能生成Ansible/Terraform脚本、提供代码优化建议和错误检测等功能,显著提升IaC开发效率和质量。通过具体场景展示了Cursor在
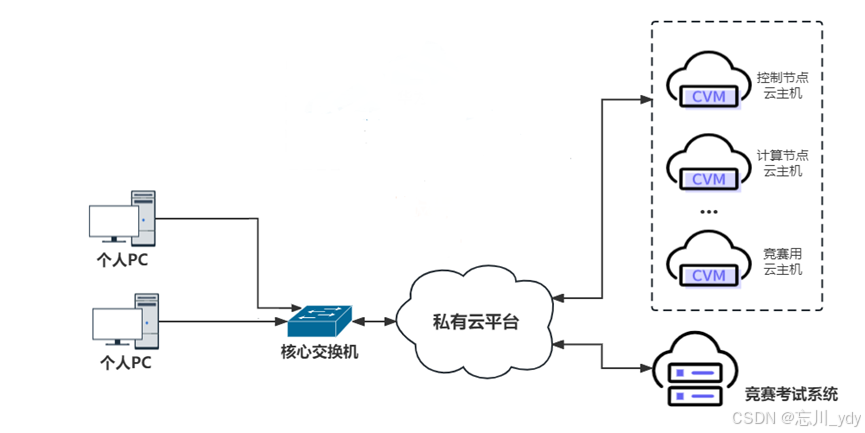
2024年河北省职业院校技能大赛云计算应用赛项赛题第3套(私有云)
2023年全国职业院校技能大赛(高职组)“云计算应用”赛项赛卷9(公有云)
ansible
——ansible
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 openEuler 社区
openEuler 社区


 AI编程社区
AI编程社区

















 AI Agent技术社区
AI Agent技术社区
 亚马逊云科技技术品牌专区
亚马逊云科技技术品牌专区








 DAMO开发者矩阵
DAMO开发者矩阵