- @2504_94276515
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
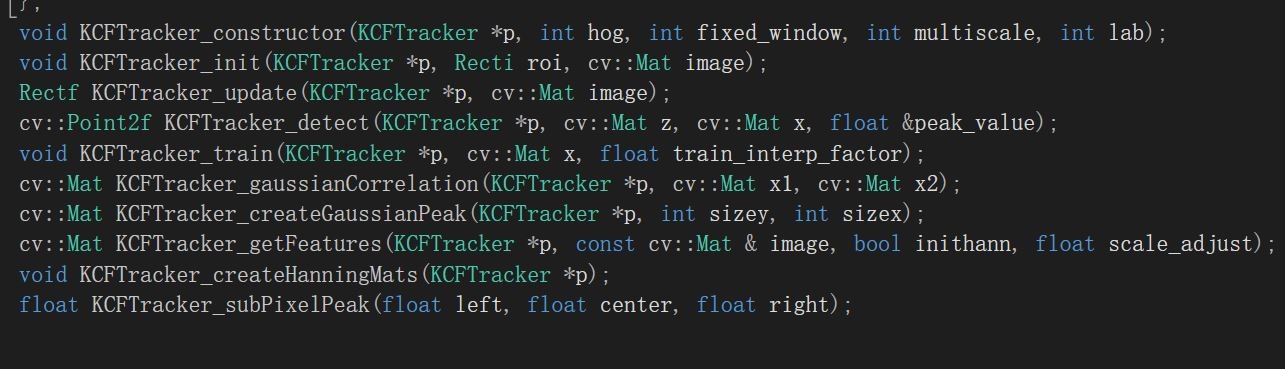
KCF目标跟踪在嵌入式设备上跑起来有种奇怪的爽感,毕竟这种级别的算法能在资源受限的环境流畅运行本身就很魔幻。KCF把相关滤波转换到频域做,利用循环矩阵性质和FFT加速,计算复杂度直接从O(n²)降到O(n logn)。这里有个坑:OpenCV的鼠标坐标是整数类型,但实际跟踪可能需要亚像素精度。这种启发式方法虽然不如DSST那种专业尺度估计,但在资源受限时能有效防止目标突然变大/变小导致的跟丢。其实
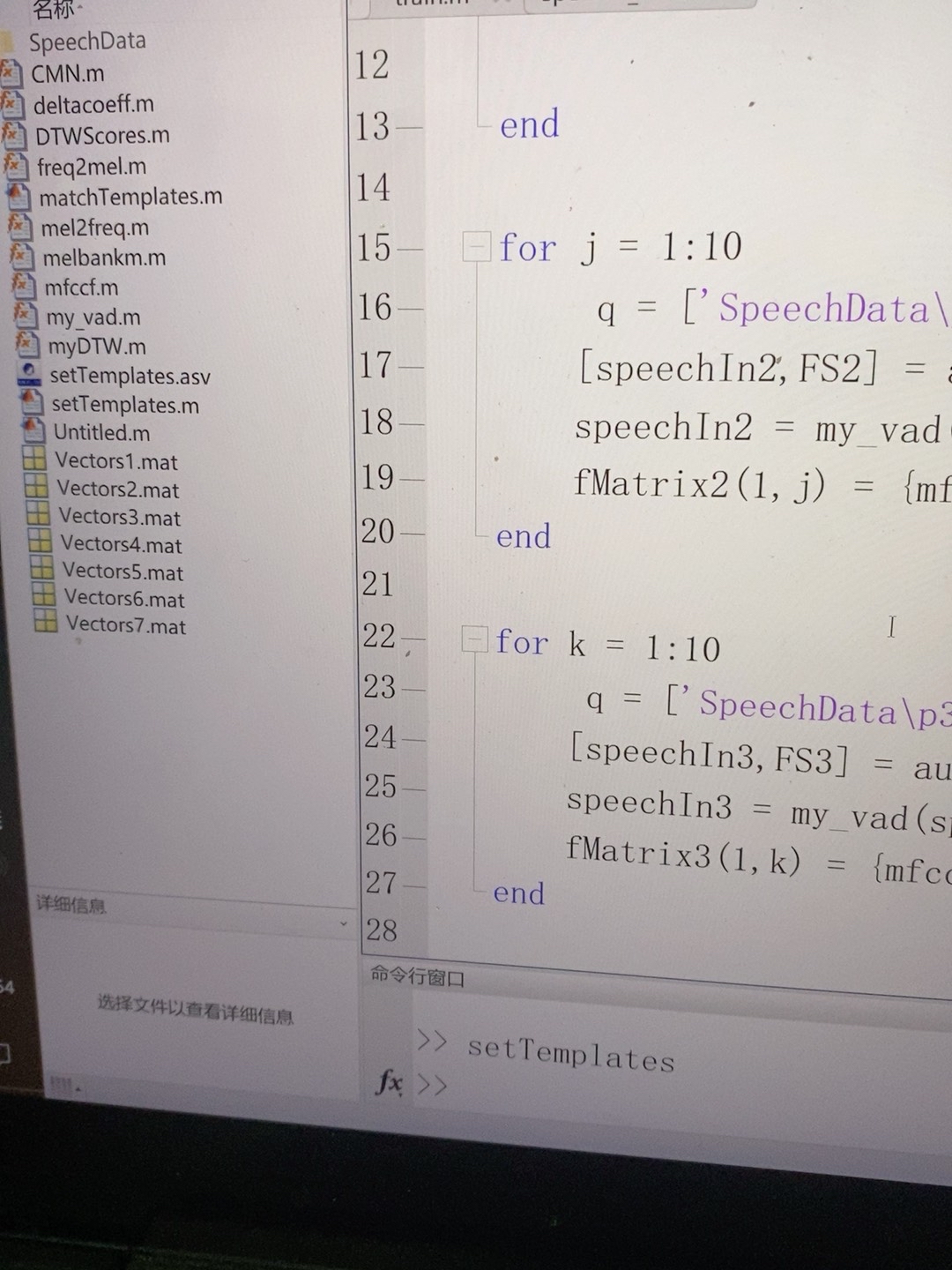
基于动态时间规整DTW的孤立字语音识别matlab代码模版最近在研究孤立字语音识别,发现动态时间规整(DTW)是个很有趣的算法。今天就来分享一下基于DTW的孤立字语音识别Matlab代码模版。
威伦通的Lua脚本处理日期比较时记得用os.date("%Y-%m-%d %H:%M:%S")格式化。搞工业数据库千万别在代码里写死密码,建议单独做配置文件,你永远不知道甲方什么时候要改密码...这里有个骚操作:威伦通的mysql库是内置的,不用额外装驱动。最近在折腾触摸屏的历史报表功能,发现工业场景里用MySQL存数据是真香。把这脚本丢到HMI的Web服务器里,组态画面里嵌个浏览器控件,URL指

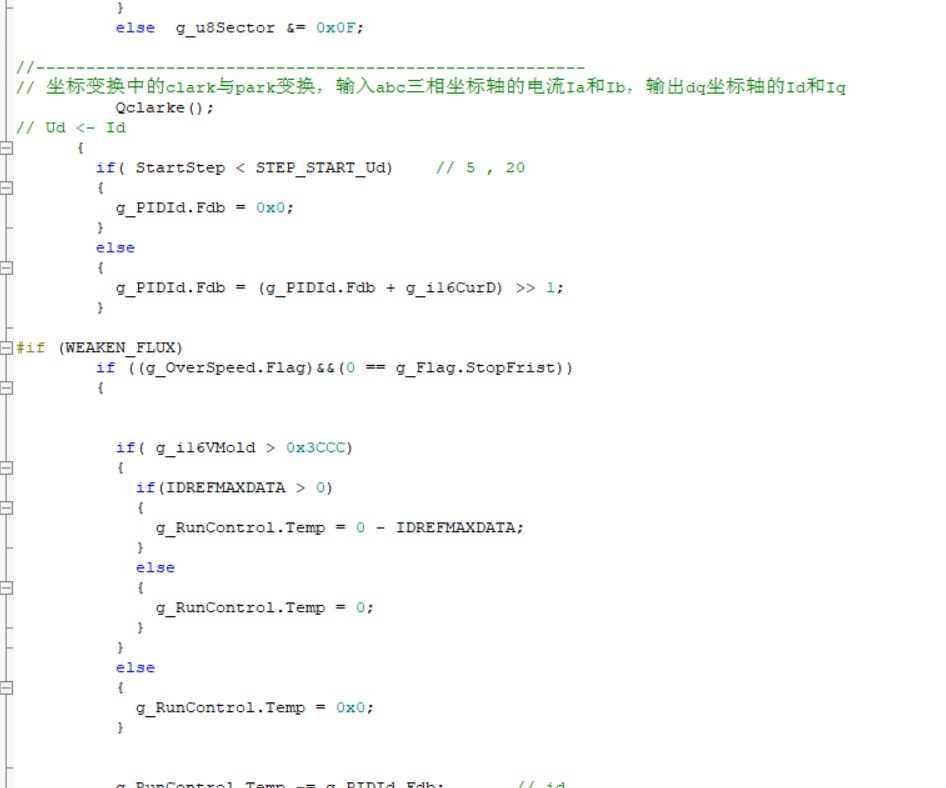
最后说个实战技巧:调试霍尔信号时,用P1.5脚的复用功能抓取波形,配合示波器的单次触发模式,能清晰捕捉到电机换相时的毛刺信号。遇到电机抖动,先把电流环的PI参数乘以0.6,再慢慢回调,比教科书上的调试法见效快三倍。整套方案BOM成本控制在35块以内,比传统方波方案贵不了几包烟钱,但骑行体验那是质的飞跃——尤其是爬坡时的线性加速,谁用谁知道。看这个驱动走线,采用"先胖后瘦"策略:MOS管G极铺铜宽度
不是技术细节,而是学会在PLC里埋调试彩蛋——比如某个特定条件下激活的debug模式,能瞬间把运行速度降到10%,方便慢动作排查问题。比如要触发程序段3,直接置位SegmentFlag.2(从0开始计数),机器人那边用$IN[18]之类的信号接收。注意这里用了常闭触点(AN),安全门关到位的时候信号是0,所以要用取反逻辑。特别是处理多车型切换时,每个车型对应不同的状态分支,维护起来至少不会乱成一锅
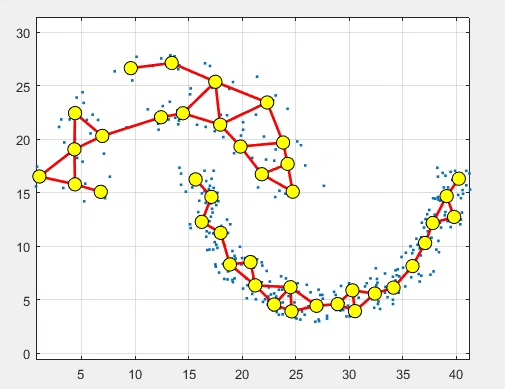
咱们先看个现象:当你在高德地图搜索"火锅",地图上突然冒出密密麻麻的红点——这背后的聚类逻辑,神经气体网络玩得比传统K-means溜多了。注意看那个指数衰减的learning_rates,这就是神经气体的灵魂——不仅最近的那个节点要动,周围的节点也会按距离衰减的方式跟着微调,像石子投入水中激起的涟漪。《神经气体网络是一种有竞争力的人工神经网络(ANN),与Martinetz和Schulten在19
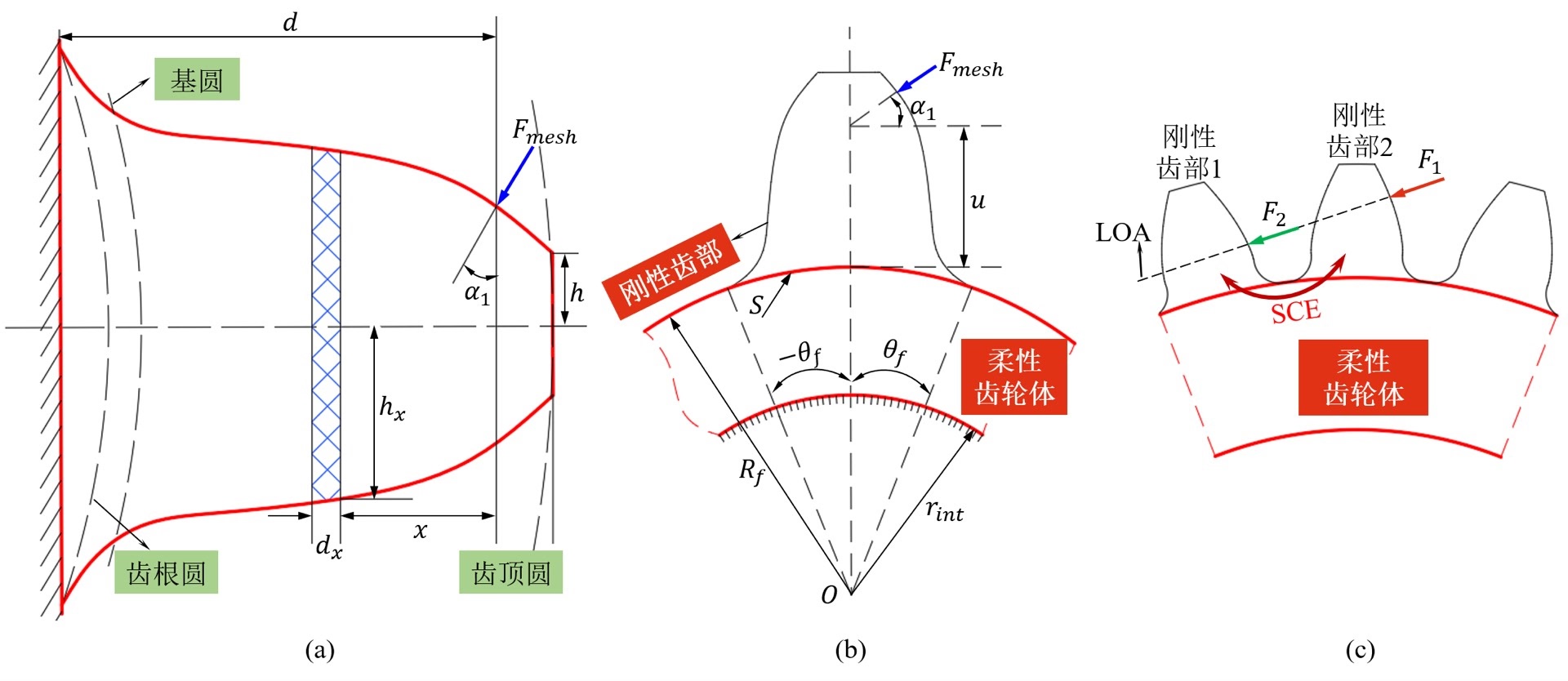
本MATLAB程序基于弹性力学势能法和齿轮切片分析原理,开发了一套完整的斜齿轮时变啮合刚度计算系统。该模型通过精确考虑斜齿轮啮合过程中的几何特性、弹性变形机制以及多齿协同作用,实现了时变啮合刚度的高精度计算。程序采用模块化设计,包含单齿刚度计算和综合刚度合成两个核心模块,为齿轮系统动力学分析提供可靠的刚度激励数据。模块首先定义斜齿轮副的基本几何参数,包括主动轮和从动轮齿数、法向模数、螺旋角、压力角
看着示教器上的轨迹曲线,突然发现结构化编程里的面向对象思想无处不在——每个Axis对象封装了状态监测、控制命令、错误处理,这才是工业4.0时代该有的编程姿势。计算结果要填到伺服驱动器的Pn202和Pn203参数里,但三菱的J4系列伺服有个坑——参数默认单位是0.1μm,直接填整数值会移动十倍距离。但要注意EBPro里的地址必须和PLC变量表严格同步,我有次版本更新忘了同步,现场调试时触摸屏按钮全变
comsol声子晶体建模文件教程,带隙计算,传输损耗计算在声学领域,声子晶体凭借其独特的声学特性,如同一个神奇的声学“过滤器”,引起了众多研究者的关注。而 Comsol 作为一款强大的多物理场仿真软件,为我们研究声子晶体提供了有力的工具。今天就来跟大家详细分享下如何利用 Comsol 进行声子晶体建模,并计算其带隙和传输损耗。

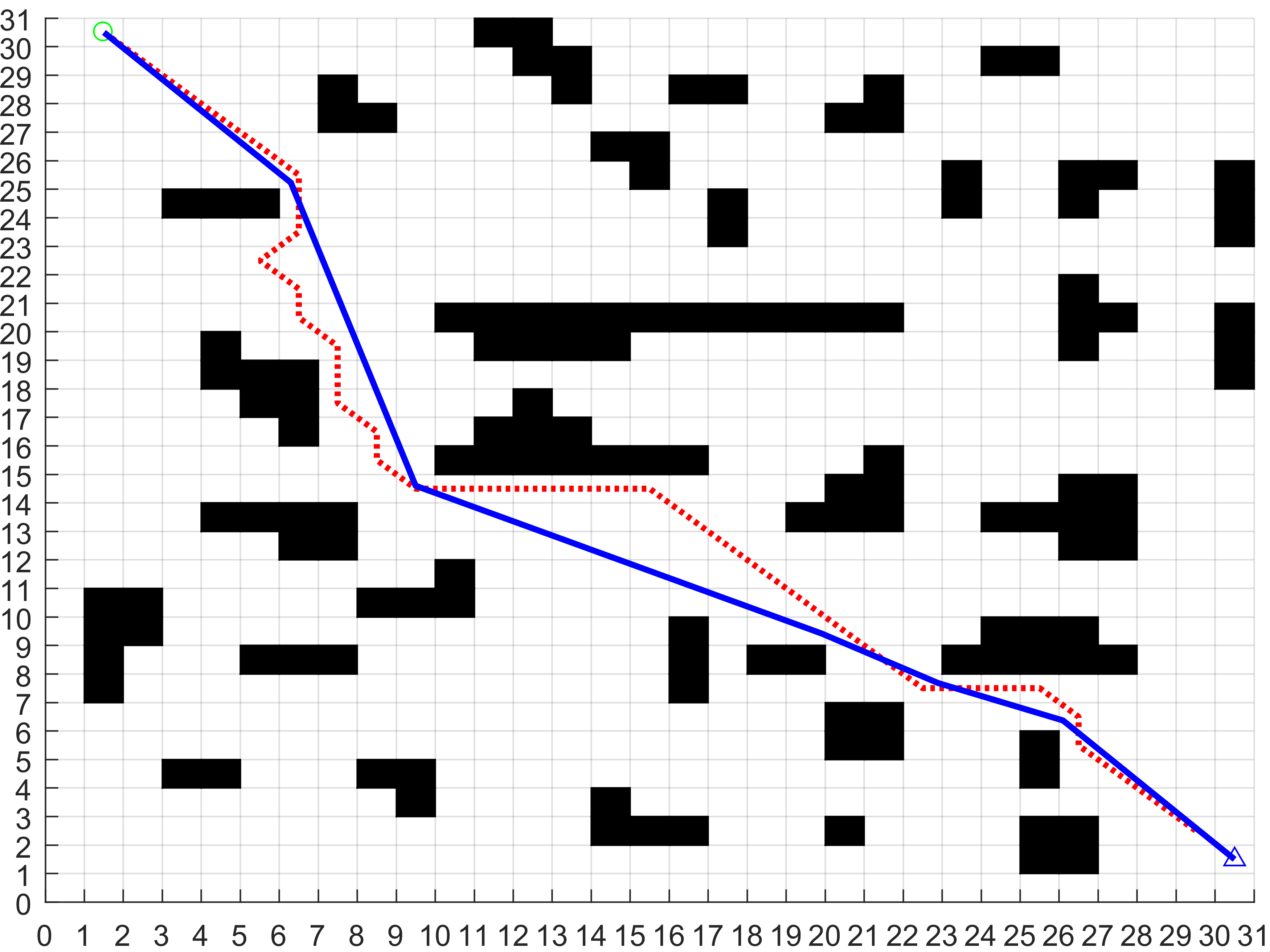
障碍通过后,速度快速恢复,整个过程加速度曲线平滑,没有出现突变——这对实际电机控制非常重要。地图扩展性方面,实测在20x20m地图上,传统A*平均耗时2.3秒,改进版1.7秒(优化了节点扩展策略)。看对比图(假装有图),传统路径(红色)几乎擦着障碍物走,改进后的(蓝色)明显保持安全距离。DWA迅速计算新速度,配合A*的全局信息,生成一个C形绕行轨迹,同时保持与静态障碍物的安全距离。改进A*算法做全