
写文章




- @m0_74880139
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
基于ROS2 Humble的 人形机器人/机械臂运动规划理论及实战(一)模型篇
<geometry></visual></link></joint><visual><geometry>
基于ROS2 Humble的 人形机器人/机械臂运动规划理论及实战(一)模型篇
<geometry></visual></link></joint><visual><geometry>
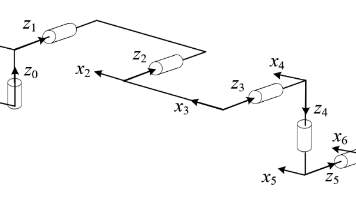
基于ROS2 Humble与Moveit2的人形机器人/机械臂运动规划理论与实战(二)机器人运动学
本文系统介绍了机器人运动规划的核心原理与方法。首先阐述了矩阵在机器人学中的重要性,特别是齐次变换矩阵如何统一旋转和平移运算。随后详细讲解了运动学正逆解:正运动学通过DH参数和链式变换求解末端位姿;逆运动学则分为解析法(基于Pieper准则)和数值法(基于雅可比矩阵迭代)。文章还深入探讨了DH参数标定的工程实践,分析了误差来源及激光跟踪仪标定流程。最后解析了数值法的实现细节,包括雅可比矩阵的数学本质
到底了