登录社区云,与社区用户共同成长
邀请您加入社区
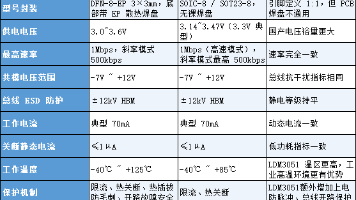
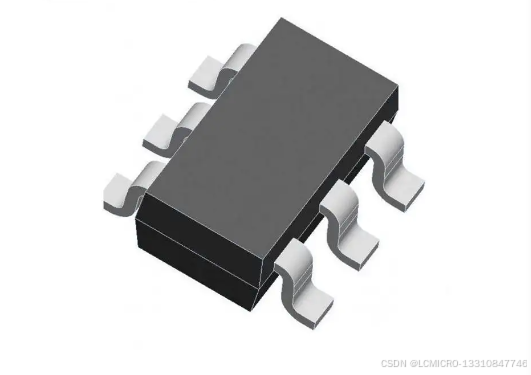
描述LDM3051是一款应用于CAN协议控制器和物理总线之间的接口芯片,与具有CAN控制器的3.3V微处理器、微控制器(MCU)和数字信号处理器(DSP)或者等效协议控制器结合使用,具有高速、斜率控制、待机、低电流关断四种工作模式,共模范围可达-7V~+12V,可应用于工业自动化、控制、传感器和驱动系统,电机和机器人控制,楼宇和温度控制,电信和基站控制及状态等领域。
LDC4725 DAC提供集成的非易失性存储器(EEPROM),允许在断电时保存DAC寄存器和配置位值。LDC4725是一款单通道、12位、电压输出的数模转换器,集成EEPROM和I2C兼容串行接口。•标准(100 kbps)、快速(400 kbps)和高速(3.4 Mbps)模式。•扩展温度范围:-40°C至+125°C。•板载非易失性存储器(EEPROM)•±0.2 LSB DNL(典型值)•
LMD9253是一款高性能4通道14位模数转换器(ADC),支持80/125MSPS采样率,采用1.8V单电源供电,具有低功耗(每通道144mW)和小尺寸封装特点。该器件提供出色的动态性能(SNR达75.1dBFS,SFDR达92dBc),内置采样保持电路和多种测试功能,支持LVDS串行输出。其宽工作温度范围(-40℃至+85℃)和灵活的时钟配置使其适用于医疗影像、雷达系统、数据采集等应用场景,4
所以我的miscellaneous 编译选项是:-mcpu=cortex-a9 -mfpu=neon-vfpv4 -mfloat-abi=hard -Wl,-build-id=none -specs=Xilinx.spec -march=armv7-a -marm。对makefile不熟,所以自己的解决方法比较粗暴,排除了几个用不上的文件夹。zynq7000是arm-v7,所以我修改的是-marc
这种转换在某些情况下可能涉及额外的内存分配(用于引用计数控制块),但如果使用std::make_unique创建原始指针,然后在需要共享时转换为shared_ptr,通常能保持较好的性能。make_shared和make_unique通常比直接使用new更高效,因为它们将对象和控制块(对于shared_ptr)分配在连续内存中,提高缓存局部性。这使得多个指针可以安全地访问同一对象。当需要将独占所有
摘要: LLVM与QEMU是两大开源技术,分别专注于编译器基础设施和系统虚拟化。LLVM通过模块化设计(如Clang前端、LLVM IR)实现跨语言编译与优化,适用于编程语言开发、静态分析及高性能计算;QEMU则基于动态二进制翻译(TCG)和硬件虚拟化(如KVM)模拟完整硬件环境,用于跨架构测试、云计算和嵌入式开发。两者核心差异在于:LLVM处理源代码→机器码的静态优化,QEMU实现机器码→机器码
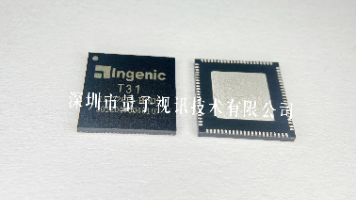
T31N是君正科技推出的高性能智能视频处理器,采用XBurst1核CPU(1.5GHz),支持HEVC/AVC/JPEG编码,最大分辨率2592x4096。具备3A图像处理、WDR/HDR功能,集成512Mbit DDR2内存和丰富接口(USB2.0/以太网等)。采用22nm工艺,最低功耗1.5mW,适用于安防监控、智能家电等领域。其时尚外观设计融合科技感与实用性,同时具备强大兼容性和数据安全防护
本文综述QEMU开源虚拟化技术,重点分析其动态二进制翻译(TCG)核心原理、全系统模拟与用户态模拟两种模式,以及模块化架构设计。文章详细探讨QEMU在云计算、嵌入式开发、安全研究等领域的应用价值,并指出其面临的性能优化、安全性等挑战。随着KVM深度集成和RISC-V生态发展,QEMU持续演进,在异构计算支持和轻量化方向取得新突破,成为解决硬件抽象与兼容性问题的关键技术方案。
【摘要】本文系统阐述了在CCStudio21.0中集成ClaudeCodeAI助手的实施方案,包含四大关键步骤:1)环境配置(安装Git/Node.js/CCSwitch工具链,接入DeepSeek-V4模型API);2)CCS插件集成(手动添加ClaudeCode插件实现智能补全与代码生成);3)硬件设计辅助(通过Claude解析原理图PDF并生成技术文档);4)工程优化(配置全局头文件路径、解
掌握 DTMF(双音多频)信号的基本原理,利用 Python 实现信号的生成与识别,理解 Goertzel 算法相比 FFT 在特定频点检测上的优势。
国产CPU五强横评:四大架构阵营争夺信创市场 当前国产CPU市场形成四大指令集架构阵营,华为鲲鹏(ARM)、海光(x86)、飞腾(ARM)、兆芯(x86)和龙芯(自研LoongArch)五强争霸。鲲鹏950(96核)和海光C86-5G(128核)性能领先,分别占据运营商和金融电信市场;飞腾依托党政信创存量优势;兆芯采用Chiplet架构实现96核突破;龙芯以完全自主架构在国防等安全领域不可替代。从
之前我读取连续四个地址的64位数据,然后计算ecc的结果不正确,上面的代码分别计算了低64位和高64位ecc值,一共是128位。为什么要进行这样的分段呢?这16位的ECC分别来自高64位数据和低64位数据,因此在实现过程中需要分为两个数据段来进行操作(可以理解为以Buffer[0]和[1]作为低64位,然后Buffer[2]和[3]作为高64位,为了计算完整个扇区的数据编写循环即可)。这128位数
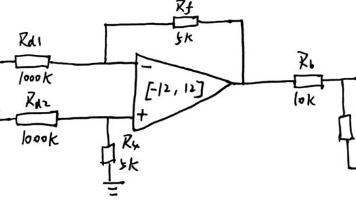
本文系统介绍了电子电路中的采样与比较电路设计方法。首先分析了电阻分压采样电路的优缺点,指出其适用于20V大功率直流电压采样等场景,但存在后级阻抗不确定等问题。进而引入运放电压跟随电路,解决了阻抗匹配问题。针对2000V高压采样等特殊场景,详细讲解了差分采样电路的设计原理和计算方法,重点阐述了其无需共地和抗干扰优势。最后预告了后续将讨论运放滤波和滞回比较电路设计。全文通过具体案例展示了从基础到进阶的
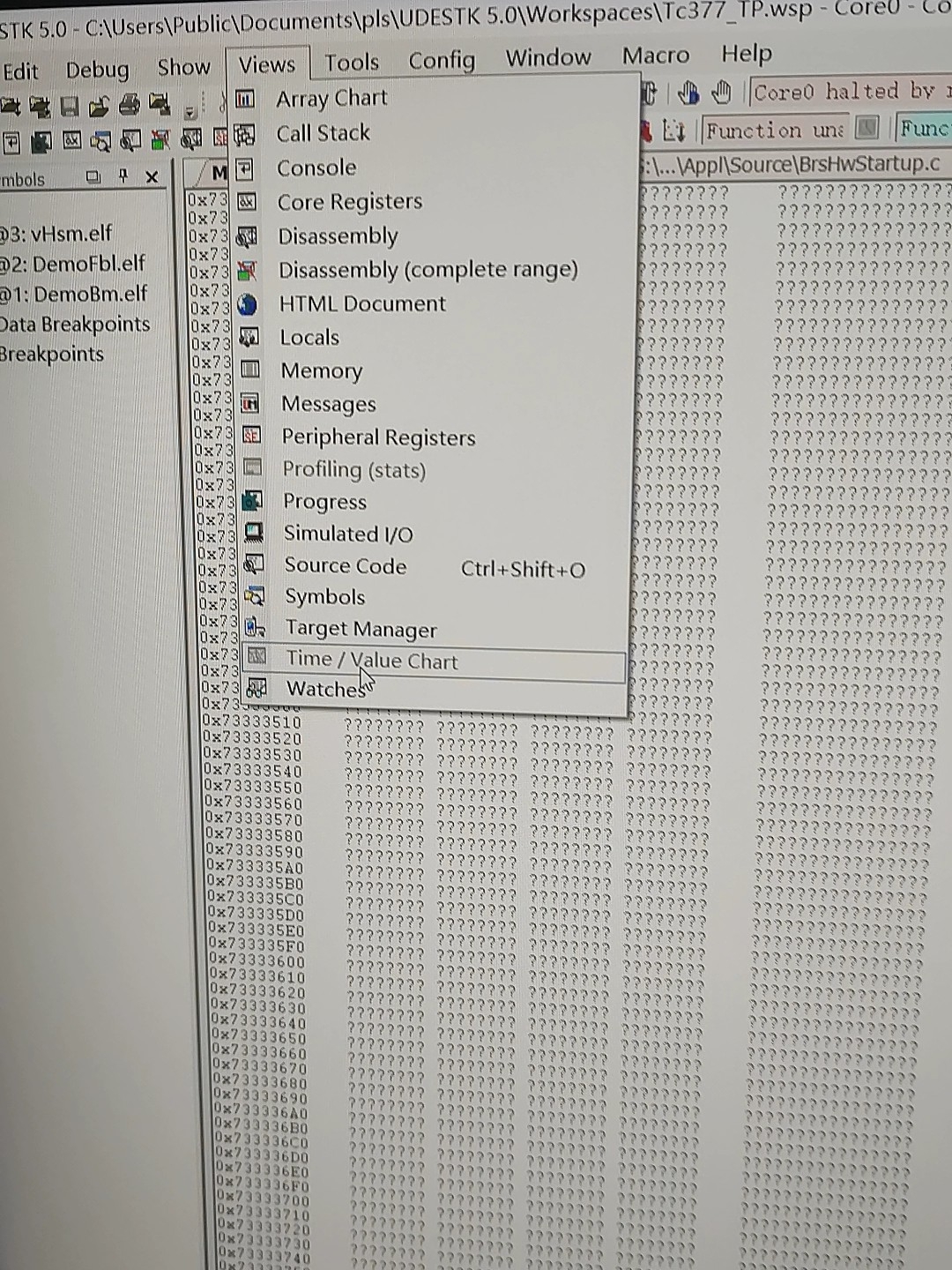
(miniwiggler驱动官方下载:https://www.infineon.com/cms/en/product/promopages/das/ 别下到Cyclone V版本!本软件用于小白基础上手,可正常下载,watch,local,memory,register等均支持,专业性的功能还请正版4万的软件。本软件用于小白基础上手,可正常下载,watch,local,memory,registe
在现代电子设计中,低压差线性稳压器(LDO)因其高效、低噪声和简单易用的特性,广泛应用于各种电源管理场景。本文将以MD7612系列的MD7612A33PA1为例,详细解读LDO的关键参数、功能和应用。
本文介绍的是一整套RISC-V的指令集的CPU芯片开发Demo代码,这一整套RISC-V指令集有38条指令,包括Load/Store、运算指令(算术-逻辑-移位)、条件跳转(BRanch)等常见的,还包括一个CSR的概念及配套的CSR系列指令。
汽车系统的安全等级对于器件是有要求的,特别是ASIL-D等级的动力能源、汽车制动、EBS等系统,对于控制芯片往往要求ASIl-D等级,这些芯片如果在涉及安全控制的环节中出现其后果不堪设想。也意味着,对于130nm工艺下的CMOS工艺设计,随着时序存储容量的变大,对于安全设计的要求则越高。多提一嘴,针对器件容软错误的技术方法“倒也不少”,太空环境下的器件往往在设计与生产环节中不计成本以保障任务成功,
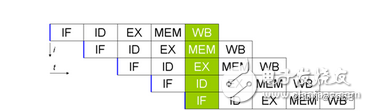
28035中CLA的流水线操作
双核DSP的内存保护介绍
DSP二氧化碳激光高速振镜控制器
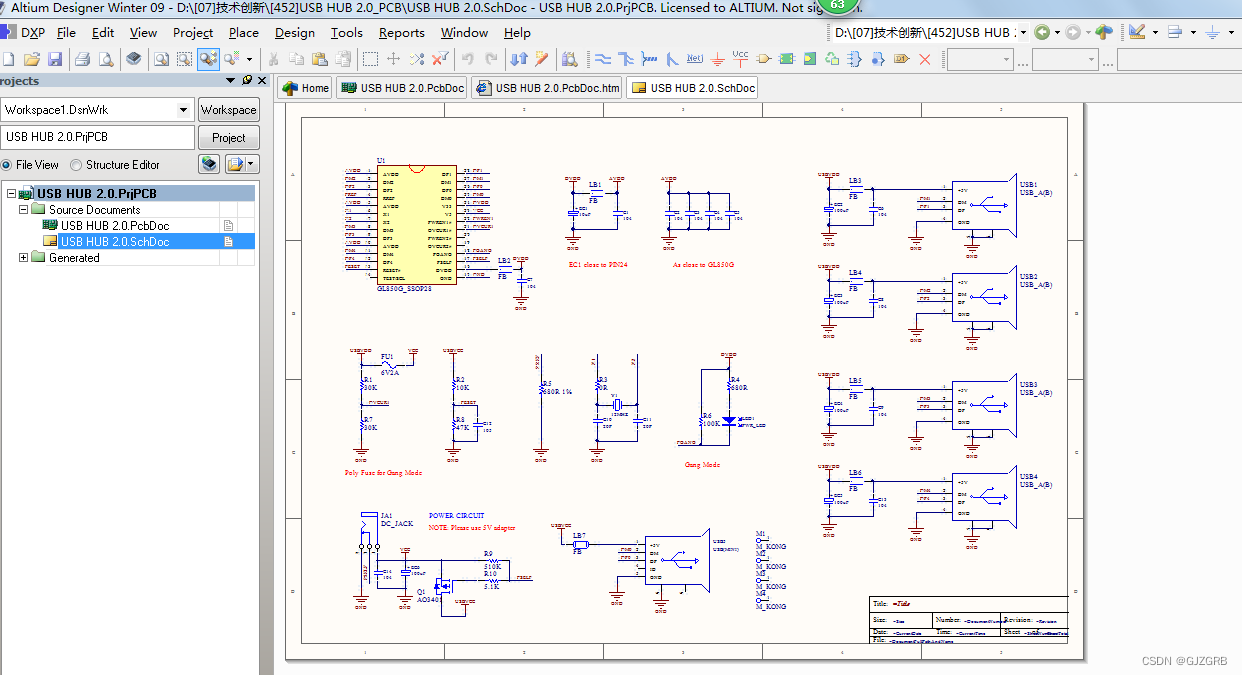
基于GL850G芯片设计USB2.0 4端口HUB硬件评估板硬件(原理图+PCB)工程文件,AD09设计的工程文件,仅供学习及设计参考。
Amlogic S905X3 四核Cortex-A55 (2.0xxGHz)处理器Mali-G31 GPU图形处理器2GB LPDDR4内存16GB eMMC 板载存储.板载RT8821CU wifi&BT2 USB 3.0 端口1 GbE 千兆网口HDMI 输出
VS100TX-A0VS100RX-A
单轴驱控一体芯片,TMC5130,TMC5160,富利威
本篇文章介绍使用Chisel开发一个“CPU芯片”!通过实现一个“CPU芯片”来理解芯片“编程”,因为CPU就是咱软件工程师心中的“殿堂”和“明珠”。
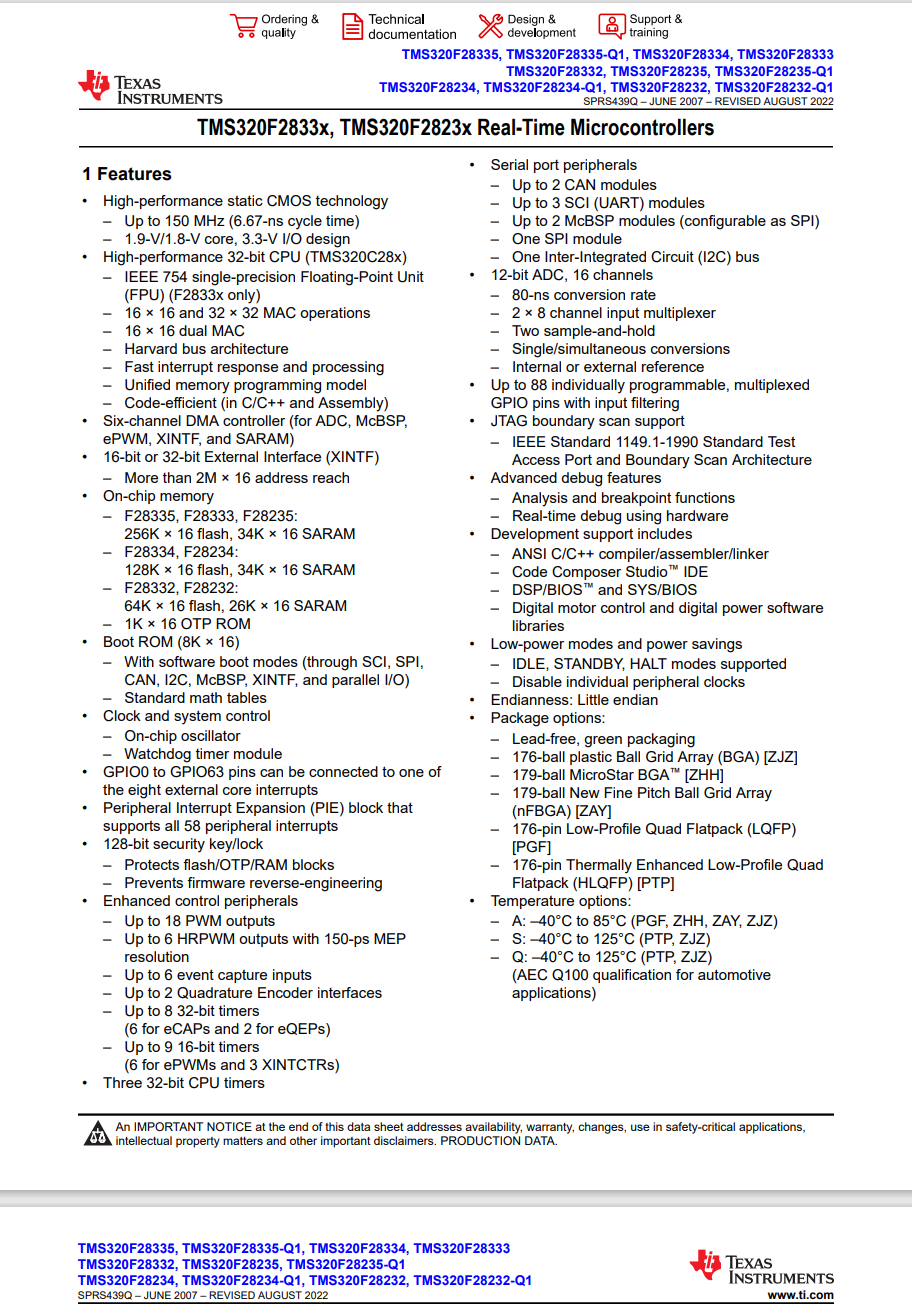
本人最近想学一下dsp,但是苦于手头没有开发板,网上的开发板又过于昂贵,加之网上很少看到带大家一步一步解读性芯片手册的文章。所以打算接自己研究DSP手册画板子的过程,代领大家解读芯片手册。(如果有错误欢迎大家批评指正)
dsp开发
——dsp开发
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 DAMO开发者矩阵
DAMO开发者矩阵
 MCP技术社区
MCP技术社区



 AI Agent技术社区
AI Agent技术社区

 亚马逊云科技技术品牌专区
亚马逊云科技技术品牌专区
 DeepSeek技术社区
DeepSeek技术社区


 鲲鹏昇腾开发者社区
鲲鹏昇腾开发者社区