




- @weixin_38498942
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文基于高通跃龙IQ-9100工业机器人平台,开发了一套完整的视觉引导抓取系统。系统采用"眼-手"协作架构,利用NPU加速的YOLOv8n-seg模型实现目标检测与实例分割,结合深度图进行抓取姿态估计。通过手眼标定建立视觉与机械臂的坐标映射,使用MoveIt2进行运动规划和碰撞避免,最终通过CAN-FD接口驱动6-DOF机械臂完成精准抓取。文章详细介绍了系统架构、硬件配置及基于
搭载骁龙 X2 Elite(X2E-96-100)的轻薄本,18 核 Oryon CPU + 85 TOPS Hexagon NPU,这配置不拿来跑本地 AI 简直是浪费。本文从介绍WSL2 安装 + Ubuntu ARM64 基础环境配置开始,到Ollama 本地大模型部署与优化,再到利用Open WebUI + Continue.dev 打造本地 AI 编程助手
本文基于骁龙X2 Elite(Windows 11,32GB内存)构建了一套完全离线的本地RAG知识库问答系统。第一篇完成环境搭建:安装Python 3.10与Miniconda,部署Ollama并拉取qwen2.5:7b模型,第二篇编写build_index.py批量入库5个Markdown文档,按chunk_size=500、chunk_overlap=50切分为47个片段通过Prompt策略
本项目在骁龙X2-Elite(Windows 11 ARM64)笔记本上,成功搭建了一套完全离线、可直接投入办公使用的会议纪要自动化闭环系统。全文分为两大阶段,核心逻辑是“先转写,后整理”。这套链路完全抛弃云端依赖,具有足够轻(脚本简单)、足够稳(阶段分离、格式固定)、足够实用(直接适配周会、复盘会、客户沟通会)的特点。至此,X2-Elite从“能跑模型”进阶为“能承担完整办公场景”的生产力工具,
本文介绍了一种基于大模型的本地化数据分析方案,使用Ollama和qwen2.5:7b模型在骁龙X2 Elite设备上实现自然语言查询数据。方案包含以下核心内容: 环境配置:在X2 Elite笔记本(32GB内存)部署Ollama,加载qwen2.5:7b模型用于代码生成 工作流程:用户输入自然语言问题→模型生成Pandas代码→沙箱执行→返回结果 关键技术:自动图表生成(根据数据特征选择图表类型)

工业机器人的安全功能(如急停、制动、限速)需要确定性响应,不能依赖可能卡顿的通用Linux系统。高通的解决方案是在主SoC外设置物理隔离的安全岛,内含锁步双核微控制器,独立时钟/电源/看门狗,符合IEC61508 SIL3标准。 安全岛与主SoC分工明确:主系统处理复杂计算(如Linux/ROS2),安全岛专责安全功能,通过受限通道通信。锁步双核通过错开两拍执行同一代码并逐拍比对,检出瞬态/永久硬
摘要 高通SensorHub(SLPI/SSC子系统)通过独立低功耗微控制器(Hexagon DSP)管理传感器数据采集与处理,大幅降低工业机器人和边缘设备的功耗。核心机制包括:1)Island Mode——独立电源域与时钟域,支持主CPU深度休眠时持续采集;2)数据闭环处理——在SLPI侧完成阈值判断、批处理(Batching)和简单算法,仅关键事件唤醒主CPU;3)独立总线控制——SLPI专用
本文提出了一种分层架构方案,用于解决工业机器人和智能相机外设开发中的实时性、稳定性和功耗管理难题。方案基于Linux标准设备模型(V4L2、SocketCAN、IIO)与Hexagon DSP协同处理,重点规划了三大外设类型(I²C/SPI传感器、CAN-FD、MIPI相机)的实现路径:1)通过DeviceTree规范硬件描述,采用regmap和子系统标准化驱动;2)利用SocketCAN原生网络
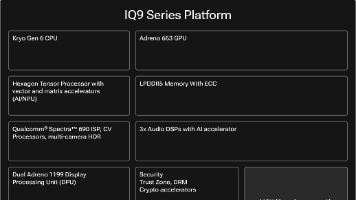
高通推出三款边缘计算平台QRB5165、IQ-9075和IQ-9100,满足工业机器人、智能相机等场景的异构算力、低功耗、功能安全和长生命周期需求。QRB5165基于骁龙865,适用AMR和工业相机;IQ-9075优化多路视觉处理,功耗更低;旗舰IQ-9100具备安全岛和锁步双核MCU,符合SIL3安全标准。文章详细对比了三款平台的硬件规格,并提供了从注册开发者账号到编译BSP的完整流程,包括内核
摘要: 本文展示了在Snapdragon X2 Elite NPU上部署Stable Diffusion 3(SD3)的完整流程,重点解析其DiT(Diffusion Transformer)架构优势及性能表现。SD3采用双文本编码器(CLIP-L + T5-XXL)和Transformer加速硬件设计,X2 Elite的Hexagon V77 NPU凭借专用注意力层单元,实现SD3 Medium
