登录社区云,与社区用户共同成长
邀请您加入社区
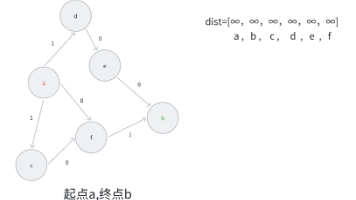
路径规划是人工智能和计算机科学领域中的一个核心问题,其目标是在给定环境中找到从起点到终点的最优路径。这一问题在机器人 导航、交通系统、物流配送、游戏AI等多个领域具有广泛的应用价值。在众多的路径规划算法中,广度优先搜索(BFS)算法以其简单性、完备性和最优性(在无权图中)而备受关注。本文将深入探讨基于广度优先搜索算法的路径规划,包括其基本原理、在路径规划中的应用、优缺点以及未来的发展方向。一、广度
做后端开发和数据运维这么多年,我见过太多团队踩过SQL性能的坑:业务量刚破十万,数据库CPU直接冲到99%,接口超时告警刷满整个运维群,排查半天最后发现只是一条没加索引的关联查询拖垮了整个服务。很多人总觉得“SQL慢了就加索引”,但实际线上场景里,盲目加索引不仅解决不了问题,还可能引发写入性能下降、索引冗余等新问题。今天我就结合自己在电商订单系统里踩过的真实案例,把从定位问题到落地优化的完整流程拆
当你第一次请求数据时,BufferedReader 会一次性从底层输入源(比如键盘、文件)读取一大块数据(默认缓冲区大小是8192个字符,即8KB)到它内部的内存缓冲区中。只有当缓冲区的数据用完了,它才会再次进行昂贵的I/O操作,去“接下一桶水”。想象一下,你家水龙头的水流很小,你要接一大桶水。一个聪明的办法是,先在水龙头下放一个大水桶,等水桶接满了,再一口气把整桶水倒进你的最终容器里。2)当你调
86=789。
ClaudeCode是Anthropic推出的终端编程助手,能够在开发者熟悉的终端环境中提供智能编程支持。其主要功能包括:1)自然语言转代码,将用户需求直接转化为可执行代码;2)智能调试,通过错误分析快速定位和修复问题;3)代码优化,自动重构代码结构提升质量;4)文档自动化,为代码生成规范注释和文档。典型应用案例包括对Supabase Python SDK的重构优化,如整理导入结构、规范命名等。相
面试过DeepSeek的应届生表示,面试流程超过6轮,现场写代码加系统设计加论文复现,多个参与过面试的应届生表示,面试官会问得非常细,不是聊大方向,是抠实验细节,并且面试官会针对你说的论文,一直追问到你答不上来为止,测试你是不是真的做过。到了特斯拉,他更是直言,说车并不重要,真正重要的是“制造机器的机器”。再说,R1,它的核心突破是摒弃人类示范,纯靠“解题—奖励—再解题”的强化学习循环,让模型自己
可上练习华子OD、大厂真题绿色聊天软件戳od1441了解算法冲刺训练(备注【CSDN】否则不通过)
DFS与BFS算法4小时训练计划摘要 本计划通过经典题目系统训练DFS和BFS算法。DFS部分(1.5小时)重点掌握回溯模板,通过全排列(LeetCode 46)练习基础回溯,N皇后(LeetCode 51)学习剪枝优化。BFS部分(2小时)侧重层次遍历,二叉树层序遍历(LeetCode 102)建立基础,岛屿数量(LeetCode 200)实践矩阵搜索,单词接龙(LeetCode 127)训练状
AI动漫角色生成赛不仅是技术比拼,更是艺术与科技融合的舞台。通过比赛推动技术创新,为动漫产业注入新活力。
public:// 创建一个大根堆(优先级队列默认是最大堆)// 这意味着队列顶部始终是当前最大的元素// 将所有石头重量加入优先级队列q.push(x);// 循环处理,直到队列中只剩下一块石头或没有石头// 取出当前最重的石头q.pop();// 取出当前第二重的石头q.pop();// 如果两块石头重量不相等,将差值重新加入队列if(a > b)// 如果相等,两者都粉碎,不需要操作(相当于
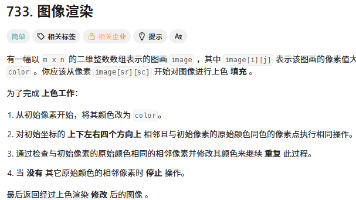
在解决算法题之前我们需要了解什么是FloodFill问题。FloodFill问题中文直译就是“洪水灌溉”问题。如下图所示,这是一块田地。它并不是一马平川的,而是凹凸不平的。就像下图所示,正数表示突起,负数表示凹陷洪水来临的时候会把凹下去的位置填满水,突起的地方不会,被包围的地方不会(本图里没有展示)本质上就是找到性质相同的连通块。
题目练习网址:【DFS/BFS】双机位A-陷阱方格第一行为房间的和 ()第二行为房间中墙壁的个数 ()接着下面会有行墙壁的坐标陷阱方格与不可达方格数量,两个信息在一行中输出,以一个空格隔开。(结尾不带回车换行)输出示例二输入输出说明本题是一道非常有意思的题目,显然路径的搜索过程可以用DFS/BFS来完成。问题在于如何判断方格是不可达方格和陷阱方格。先考虑相对直观的不可达方格的判断。我们从起点到终点
虽然Record提供了自动生成的实现,但仍支持一定程度的自定义。开发者可以在Record声明中添加自定义构造函数、方法以及静态字段。。此外,Record可以实现接口,但不能显式扩展其他类(隐式继承Record类)。这种设计在提供灵活性的同时,保持了Record的简洁性和语义清晰性。
通过Linq的惰性求值特性和异步操作的并行化能力,开发者能够以简洁的链式调用处理大规模数据流,同时避免阻塞主线程。通过AsParallel().Select(async x => await ProcessAsync(x))模式,既能利用多核CPU优势,又能保持异步操作的响应性。但需注意控制并发度,避免资源竞争和过度并行化导致的性能下降。使用EF Core时,可通过AsAsyncEnumerabl
类和对象的概念成为了C++的立身之本,通过封装、继承和多态这三大特性,程序员能够以更直观的方式对现实世界进行建模,构建出层次清晰、结构严谨的应用程序。概念的出现为模板编程提供了更强大的类型约束和更清晰的错误信息,使得泛型代码的设计和使用更加安全直观。从简单的函数模板到复杂的类模板,再到模板元编程,模板技术极大地扩展了C++的表达能力,使其能够以高效、优雅的方式解决一类广泛的问题。这种高度模块化和可
/ 异步处理响应 client.newCall(request).enqueue(new Callback() { @Override public void onResponse(Call call, Response response) { if (response.isSuccessful()) { String jsonData = response.body().string();在构建
拓扑排序用于对有向无环图(DAG)的顶点排序,满足所有有向边$u \to v$中$u$在$v$之前。BFS实现(Kahn算法)步骤如下:以下为C++/Java/Python实现对比(假设顶点编号从0开始):特点:特点:特点:
在 Python 中,类变量和实例变量是面向对象编程中的重要概念,它们的访问方式和作用域有所不同。下面将详细解析访问这两种变量的有效途径。
值得注意的是,这道题的图结构不是显式的。这道题目中控制BFS过程的关键在于判断所有橘子是否全部腐化,所以我们需要先统计一下新鲜橘子的数量,之后在BFS扩散“腐化”过程中不断去减小这个数量,当新鲜橘子的数量减为0时,BFS过程结束,如果最后新鲜的橘子无法减为0,说明不可能将所有橘子腐化,返回-1即可。题目给了我们一个二维网格图,在这个网格图中,0代表未放橘子的空格,1代表新鲜的橘子,2代表腐烂的橘子
摘要:C++智能铁路调度系统通过列车控制、路径优化和信号管理实现高效运输。系统测试面临多线路接口、实时响应、复杂场景等挑战,采用分层自动化测试策略,结合GoogleTest、仿真平台等工具,提升功能验证和性能测试效率。通过CI/CD集成实现90%自动化覆盖率,降低25%调度延迟,提高30%准点率,确保系统稳定性和运输可靠性。(149字)
二者的一举一动都代表着巨头 AI 竞争的缩影,也难怪媒体们纷纷地将此次夸克对话助手与豆包进行对比——不管是“塞进豆包”,还是“百度+豆包”,种种论断差不多都是在强调,夸克对话助手在产品形态上向豆包靠拢。过去两三年来,无论是已经在教育场景打响品牌的夸克高考,还是自建涵盖医疗、财经、法律等领域的专业知识库,乃至今年上线的深度搜索功能,多数产品功能几乎都是围绕提升效率进行。9.9 比 9.11 大,但是
如何将机器码加密生成授权码,可以使用的加密算法其实五花八门,每个人都可以自己研究一套自己独有的加密方法,尤其是不需要考虑解密,不要求算法可逆的情况下,问题就更简单了。通过上述加密算法,我们可以通过机器码生成授权码,并且通过一系列加密算法的组合加密,基本上很难观察出机器码和授权码之间的关系,更没办法推算出你具体用了什么加密方法。进入授权流程时,程序先扫描本机运行环境,生成。不管使用什么算法,凡离线方
以走迷宫来比喻:深度优先搜索(DFS):选择一条路(分支)一直走到底,直到死胡同。然后回溯到最近的一个岔路口,换另一条没走过的路继续深入。“不撞南墙不回头”。广度优先搜索(BFS):站在起点,先探索所有从起点能直接到达的地方(第一层)。然后从这些地方出发,再探索所有它们能直接到达的、且未被探索过的新地方(第二层)。“层层递进,地毯式搜索”。
工业机器人解决的是“替代人力”的问题,而家庭机器人解决的是“创造新需求”的问题——情感陪伴、教育娱乐、日常服务,这些需求在存量市场中几乎不存在,一旦被激活,将开辟全新的增量空间。业界预言,2026年,商业及消费场景,开始成为人形机器人“更有趣的赛道”,众多机器人团队开始面向消费者推出更拟人的人形机器人。但实际上,优必选真正引起关注的,并不是这个宏大目标,而是其极具冲击力的产品外观,契合了一部分用户
不需要重新写一遍Python脚本去适配新客户端,也不用手动翻译成另一种语法风格——同一个网站审计技能,在不同的终端下运行,核心逻辑不变,差异仅在于调用方式微调,平台已帮你预置好各版本。点进去看描述是否匹配你的需求,确认后复制安装命令,粘贴到你的编辑器终端中执行即可。如果你常被类似的问题困扰:“这段SQL怎么加注释才能让AI准确理解意图”、“Markdown转HTML时怎样保留下划线样式”、“Git
他在编辑器右键选择“修复当前TS文件”,几秒钟后,光标跳转到第一处缺失类型的位置,旁边直接给出带解释的修改建议:“此处函数返回值未声明类型,检测到实际返回Promise<Record<string, number>>,是否插入?这种细致,并非来自某个工程师拍脑袋决定,而是平台长期沉淀的结果。不到三秒,跳出一个叫“Gemini-CLI 自动修类型”的Skill,简介写着:“接入后,对当前文件执行一键
这与 AI 无关,两个原因:编程习惯与责任心、业务变更与紧急度。当然,永远是冲突的、没时间的。其实,第一要看的是重要性,有些“屎山”在那也无所谓啦。反而有了 AI,更有时间让代码保持健康度、提高质量下限。
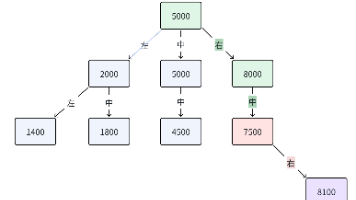
即给树的每个节点从左到右,从上到下编号,如果从1开始编号,某个节点下标为x,则它的孩子节点为2x和2x+1。依旧使用循环+队列的模板,非空节点入队列,队列元素应使用pair类型,记录节点及其下标,每次循环取队头和队尾的下标做差再加1,即可求出一层的宽度。与上一题相似,锯齿形层序遍历时,可以照常从左到右遍历,把第一层记为level=1,每偶数层时逆序数组即可。如下图所示,3000个节点分别位于两侧,
很多一线开发人员用Explain只会看type字段有没有达到range级别,从来不会对比不同数据分布、不同业务场景下的执行计划差异,等到线上突发性能故障的时候,根本找不到优化器选错执行计划的隐蔽问题。90%的线上偶发慢查询故障,靠普通的监控指标根本定位不到,只要掌握Explain执行计划的对比方法,把不同场景下的执行计划逐条拆解对照,就能快速定位到靠常规手段找不到的隐蔽性能问题。接下来我们就结合合
在互联网项目迭代与数据量爆发式增长的当下,很多开发者都会遇到一个共性问题:初期运行流畅的SQL查询语句,在业务上线数月、数据量突破百万、千万级别后,逐渐出现查询卡顿、接口超时、数据库CPU占用过高等问题。不少开发人员习惯依靠原生SQL语句实现业务需求,忽视了查询逻辑的合理性与数据库性能损耗,最终导致系统响应变慢、用户体验下降,甚至引发服务宕机。SQL查询优化并非高深的理论技巧,而是贴合业务场景的实
BFS是一种用于遍历或搜索树或图的算法,从起始节点开始,逐层访问相邻节点,确保先访问所有相邻节点后再深入下一层。:BFS天然适合求解无权图的最短路径,首次访问到目标节点时的路径即为最短。:取出队首节点,访问其所有未访问的邻接节点,加入队列并标记。:若目标节点已知,可从起点和终点同时BFS,减少搜索范围。:在二叉树中,BFS等价于层序遍历,可记录每层节点。:队列为空时结束,表示所有可达节点已访问。:
本文介绍了图的三种存储方式(邻接矩阵、邻接表、边集数组)和两种遍历算法(DFS、BFS)。邻接矩阵适合稠密图,邻接表是工程首选,边集数组仅适合存储所有边。DFS采用递归实现深度探索,BFS用队列实现层序遍历。根据图稀疏程度选择存储方式,结合DFS/BFS可解决最短路径等基础算法问题。文章提供完整Python代码示例,帮助新手快速掌握图算法核心知识。
本文面向已经掌握数组、集合、栈和队列的 Java 初学者,系统梳理图的基本概念、无向图/有向图/带权图区别、邻接矩阵与邻接表的存储取舍,并用 Java 示例讲清 DFS、BFS、visited、防环、无权图最少边数路径和连通分量统计,适合在学习常见数据结构与算法前打牢图遍历基础。
宽度优先
——宽度优先
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 DAMO开发者矩阵
DAMO开发者矩阵



 快递鸟社区
快递鸟社区


 AI Agent技术社区
AI Agent技术社区

 DeepSeek技术社区
DeepSeek技术社区



 亚马逊云科技技术品牌专区
亚马逊云科技技术品牌专区