登录社区云,与社区用户共同成长
邀请您加入社区
在Linux编译C/C++项目时,还是只会傻傻使用gcc、g++命令手动进行编译吗?GNU make你值得拥有,快速完成编译任务,只用输入“make”。
正常输出应看到软链接指向 cann-8.5.2,目录内存在 bin/setenv.bash。提示 No such file 代表安装残缺,需要重装 CANN 8.5.2。,环境变量不全,容易出现头文件/链接库找不到报错。很多新版安装包已经弱化该入口,变量完整性不如。算子开发、TBE/DSL、单算子编译仿真。CANN 8.5.2 的 atc。,有几种常见原因和修复方案。上层业务推理框架配套环境,再重
GDB 是Linux 环境下 C/C++ 开发者必备的核心技能。它虽然基于命令行,但功能强大,灵活性远超许多图形化调试器。💡 学习建议:从最基础的runbreaknextprintbacktrace命令练起,结合实际调试一个小程序,很快就能上手。遇到具体问题再查阅手册学习新命令。官方手册info gdb或在线手册是最权威的参考。实践练习:多写几个有 Bug 的小程序(如数组越界、空指针解引用、死
多版本函数指的是可以为同一个函数在不同的处理器平台或者指令集下编写不同的实现,程序在运行时会自动选择一个最合适的实现作为这个函数真正运行的实体。文字解释可能比较抽象,我们拿具体的cpp代码举个例子:int foo ()return 0;// 注意这里,指针和通过函数名应该调用相同的函数return 0;在例子中我们编写了4个foo。
(1)GDB是GNU项目的开源、源代码级命令行调试器,可控制程序的启动、暂停和终止,并在程序暂停时查看内部变量、寄存器、调用栈等运行现场,供开发者定位代码问题。(2)GDB支持绝大多数主流UNIX、Windows、macOS操作系统;嵌入式开发使用对应架构的交叉版GDB(如ARM Cortex-M系列arm-none-eabi-gdb)。(3)GDB支持四类调试操作:①加载/启动目标程序,配置运行
GNU Radio是一款开源信号处理运行时和开发工具包,拥有6,124个Star,在信号处理领域属于头部项目。它最初用于软件定义无线电和无线通信仿真,现已广泛应用于学术界、商业及业余爱好者领域,覆盖数字通信、核物理、射电天文等多个方向。项目提供图形化开发环境GNU Radio Companion(GRC),支持拖拽模块构建信号处理流程。安装可通过系统包管理器或源码编译,下一代版本GNU Radio
EMOS 嵌入式操作系统继承于uCOS-ii v2.0 的改写。基于uCOS-ii 的核心思想和核心代码,进行了如下改写:(1)所有核心代码基于商业代码常用风格进行重写。结合笔者多年嵌入式软件开发经验总结进行重写和归纳。(2)提供MinGW仿真平台环境,无需基于Borland C++或者实物CPU平台进行仿真。uCOS-ii提供了大量平台的移植件,这些移植件基于简单的修改即可提供给EMOS使用。M
HPL-用于分布式内存计算机的高性能Linpack基准的便携式实现
make是一个自动构建工具,它能够自动确定大型程序中哪些部分需要重新编译,并执行相应的命令来完成编译。GNU make 由 Richard Stallman 和 Roland McGrath 实现,3.76 版本之后由 Paul D. Smith 维护。GNU make 遵循 IEEE 标准 1003.2-1992 (POSIX.2) 第 6.2 节。虽然本文示例使用 C 语言,但 make 适用
基于长短神经网络LSTM做多特征输入单输出的二分类及多分类模型。程序内注释详细,直接替换数据就可以用。程序语言为matlab。程序可出分类效果图,迭代优化图,混淆矩阵图具体效果如下所示。在机器学习领域,长短时记忆网络(LSTM)凭借其处理序列数据的独特优势,在众多分类任务中崭露头角。今天咱们就来聊聊如何用Matlab基于LSTM搭建多特征输入单输出的二分类及多分类模型。
MPFR构建过程摘要 本文详细记录了在aarch64架构下使用OHOS_ARCH=aarch64 OHOS_ABI=arm64-v8a sh ./create-hnp.sh命令构建MPFR高精度浮点库的过程。MPFR作为GCC等工具链的核心依赖,提供任意精度浮点运算和IEEE 754标准支持。构建流程包括:通过顶层Makefile触发mpfr包编译、使用OHOS SDK的LLVM工具链配置(--h
在计算机科学的硬核世界里,GNU Guix 以其“从仅357字节的 hex0 开始完整自举 GNU 系统”的壮举,为软件构建的信任链树立了极致的标杆。它像一位严谨的数学家,用声明式的逻辑构建了一座坚不可摧的堡垒。然而,当我们把目光投向更广阔的未来计算版图时,会发现操作系统正在经历一场更为彻底的范式进化——这就是一多 OS(Yiduo OS)。它不仅继承了自举与可验证的核心理念,更通过颠覆性的组合式
本文介绍了线程本地存储(TLS)的基本概念及其在ELF文件中的实现方式。TLS通过PT_TLS程序头描述段组织变量,包含初始化(.tdata)和未初始化(.tbss)两部分。文章详细阐述了四种TLS访问模型(LE、IE、LD、GD),并重点分析了Relink加载器对LD和GD模型的支持机制。
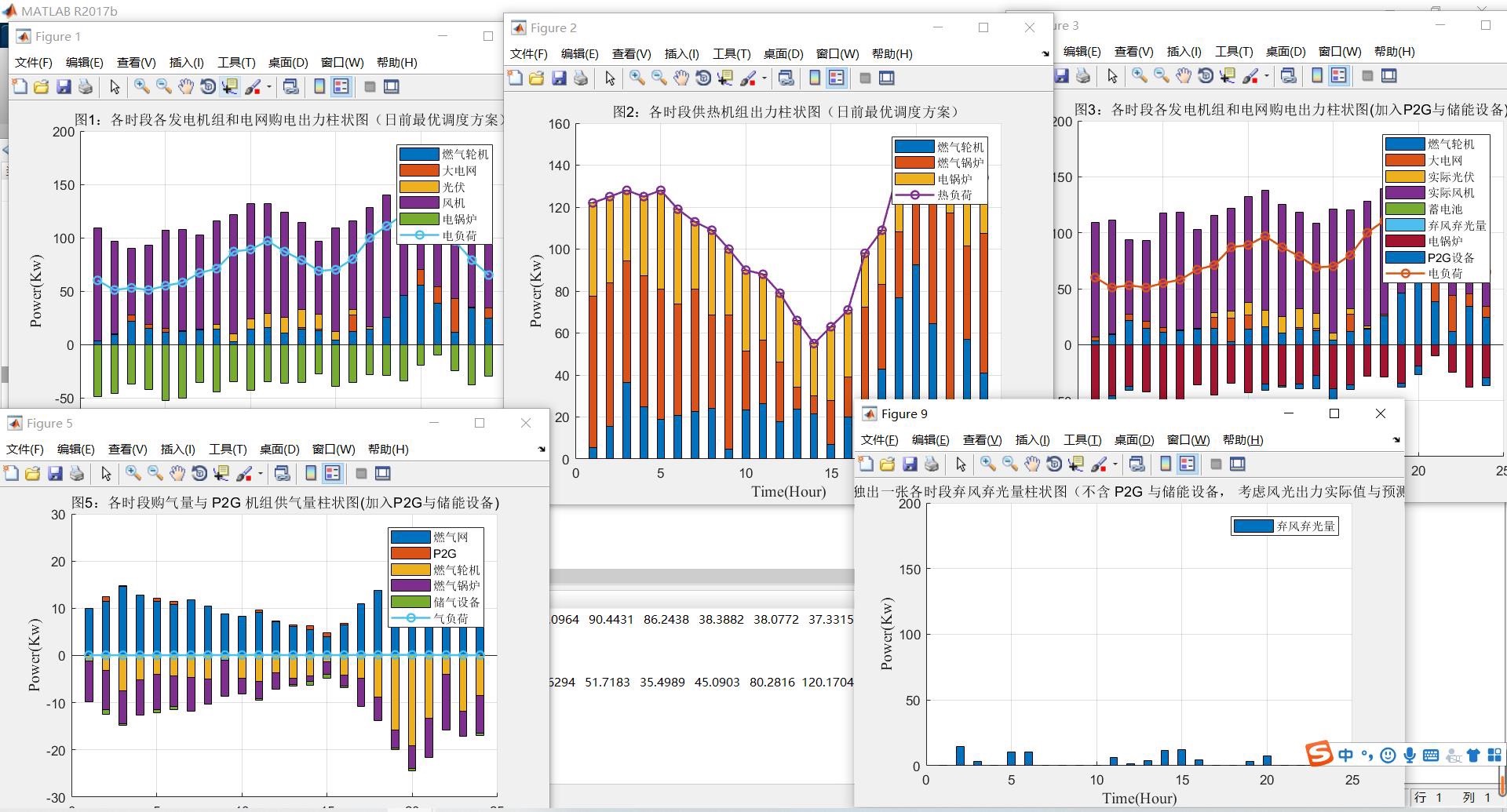
本代码实现了一个综合能源系统(Integrated Energy System, IES)的优化调度模型,该系统集成了电力、天然气、供热和制冷多种能源形式。模型采用改进的粒子群优化算法(Particle Swarm Optimization, PSO)来解决复杂的多能源协同调度问题,实现了在不确定条件下的经济环保运行。
【代码】修改 GNU GRUB 默认启动项指南。
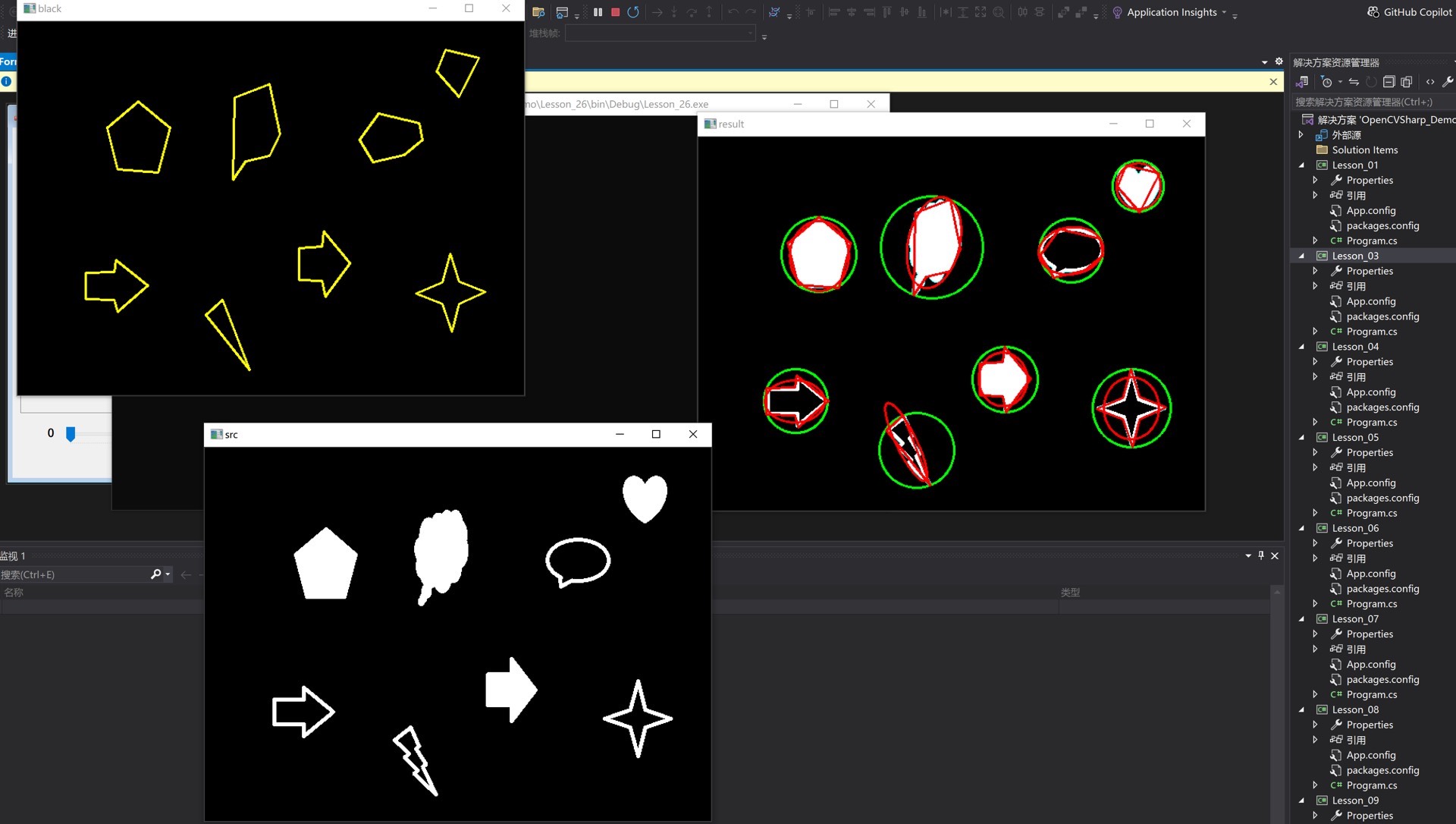
OpencvSharp资料,采用C#加Winform编写,包含接近50个Demo,直接运行即可。例程包含:模板匹配、边缘识别、人脸识别,灰度变化、标定等。最近在图像处理领域折腾,发现了一个超棒的资源——基于OpenCvSharp,用C# 加Winform编写且包含近50个可直接运行Demo的项目,简直是图像处理爱好者和开发者的福音。今天就来跟大家唠唠这里面的精彩内容。
GNU C的一大特色(却不被初学者所知)就是attribute机制。attribute可以设置函数属性(FunctionAttribute)、变量属性(Variable Attribute)和类型属性(Type Attribute)。attribute书写特征是:attribute前后都有两个下划线,并切后面会紧跟一对原括弧,括弧里面是相应的attribute参数。attribut
自己的环境:Ubuntu16.04 , ros-kinetic运行程序时报错:通过这个报错可以看出,报错提示缺少,也就是缺少。(报错提示缺少,也就是缺少)通过以下指令可以查看当前的系统版本:通过上图可以发现,确实缺少。通过链接直接下载。解压,得到文件,比如解压到了下;移动到文件夹下重新建立软连接通过以下指令可以查看当前的系统版本:通过上图可以发现,现在已经安装成功了~~[1] 轻枫柳曳1208.
vscode 使用 JLINK
编译时试图链接/lib/x86_64-linux-gnu/libstdc++.so.6,结果发现有问题。说明要换用gcc的。
在jeston中运行代码遇到以下问题:系统中安装的库版本过旧,不满足scipy库中某个组件(这里是)所需的版本。这通常发生在使用了较新版本的编译器编译的 Python 库,但是系统上的 C++ 标准库版本较旧的情况下。
根据提示是 /usr/lib/x86_64-linux-gnu/ 路径下的 libstdc++.so.6 缺少版本 GLIBCXX_3.4.29。结果显示,里面确实有同类型的文件,我们直接选择一个查看是否有我们需要的版本。输出的结果如下,可以发现里面有我们需要的版本。可以发现输出的结果里确实缺少了我们需要的版本。
主要原因是新安装S32软件可能存在系统找不到GNU编译器导致。
使用VSCode+CMake+Arm GNU Toolchain搭建GD32开发环境
/usr/lib/x86_64-linux-gnu/libstdc++.so.6: version `GLIBCXX_3.4.30' not found
上述编译会默认生成riscv64-unknown-linux-gnu-gcc版本的交叉编译器,但我们需要riscv64-unknown-elf-gcc。PS:.riscv-binutils与riscv-gdb来自于同一个仓库,且与本地要求的文件夹名称不同,需用命令指定本地名,riscv-gdb同理。进入到riscv-gnu-toolchain的文件目录下,执行。方法二:去到一个不重要的路径新建c程
问题背景在使用VScode时发现万能头文件<bits/stdc++.h>的包含语句下出现红色波浪线,但是能正常运行。#include <bits/stdc++.h>解决思路在编译器位置创建一个对应的头文件找到编译器读取头文件的位置在vscode中写一个能够读取的头文件,右击头文件,点击转到定义打开头文件在vscode左侧找到“打开的编辑器”,点击“在文件资源管理器中显示”能
根据提示信息可以知道,github 在 2021.8.13 移除了密码认证的支持,它建议使用 personal access token 代替密码认证。在使用命令行或API的时候,应该创建一个个人访问令牌(personalaccesstoken)来代替密码具体操作自行百度...
devtools::install_github()安装常见报错
首先官网下载 WD Security(Windows 系统适用)地址:软件和固件下载 | WD 支持安装选择删除密码点击更新安全设置OK 密码删除卸载完成
ldd 自己的测试库:发现默认路径下的libstdc++.so.6缺少GLIBCXX_3.4.26查看本机目前的so的版本有哪些:strings /usr/lib/x86_64-linux-gnu/libstdc++.so.6 | grep GLIBCXX发现没有对应3.4.26版本,因此需要下载需要的3.4.26版本so库放到/usr/lib/x86_64-linux-gnu下载链接libstd
关于ubuntu git 报错 fatal: unable to access 'https://github.com/GnuTLS recv error (-54): Error in the pull function.改正将,命令中的https 替换成git
gnu
——gnu
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 AI Agent技术社区
AI Agent技术社区


 CANN开发者社区
CANN开发者社区
 亚马逊云科技技术品牌专区
亚马逊云科技技术品牌专区


 openEuler 社区
openEuler 社区

 DAMO开发者矩阵
DAMO开发者矩阵



 脑启社区
脑启社区


 Harmony PC 开发者社区
Harmony PC 开发者社区

 AtomGit开源社区
AtomGit开源社区


 腾讯云开发者社区
腾讯云开发者社区