




- @Williamcsj
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
Vscode——远程开发(Windows为主机,Ubuntu为服务器)一、Ubuntu设定为服务器二、查看服务器端的用户名和ip三、主机Vscode操作一、Ubuntu设定为服务器1、安装ssh的服务器端sudo apt-get install openssh-server2、启动ssh服务器/etc/init.d/ssh restart测试:输入下面这行代码:netstat -tlp如果出现 t
Ubuntu——卸载cuda、cudnn的方法一、卸载cuda二、卸载cudnn参考链接一、卸载cuda例如,我想卸载已经安装的cuda11.2,那么我执行 cd到 /usr/local/cuda-11.2/bin下,执行sudo ./cuda-uninstaller,用空格键勾选以下几项,选择done,提示Successfully uninstalled 完成卸载。二、卸载cudnn例如,我想卸
一种常用的策略是按照线性缩放规则来调整学习率,即当BatchSize增加N倍时,学习率也增加N倍。另一种策略是保持权重的方差不变,此时学习率应该增加为原来的sqrt(N)倍。

Matlab——读取和写入Excel表格一.函数介绍1.1读取函数xlsread介绍1.1.1语法1.1.2说明1.2写入函数介绍1.2.1语法1.2.2说明二.举例2.1例子要求2.2操作步骤2.2.1读取add1,add2数据2.2.2进行求和运算2.2.3结果写入Excel表格对应位置2.3操作结果三.完整代码注意事项一.函数介绍1.1读取函数xlsread介绍1.1.1语法num = xl
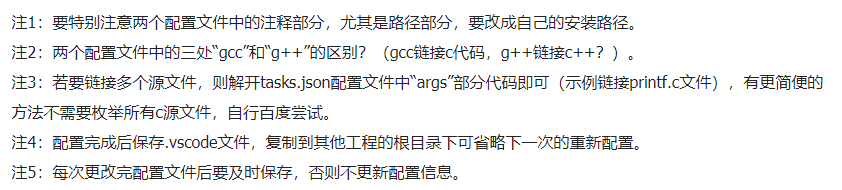
Vscode——windows系统搭建C/C++开发环境(可调试)
Windows——Vscode环境配置mpi开发环境

1. 添加到监视;2. 在数据查看器中查看值

aarch64-linux-gnu-g++:error: .o: No such file or directorymake:***[Makefile:3516:VideoProcl Error 1

将from torch._six import container_abcs, string_classes, int_classes改成:string_classes = strint_classes = intimport collections.abc as container_abcs
Vscode——无法服务器图片的报错解决:“Error: Could not register serviceworkers: InvalidstateError: Failed to ......”