登录社区云,与社区用户共同成长
邀请您加入社区
摘要:本文介绍如何利用Kind(Kubernetes in Docker)工具在单台电脑上快速搭建多节点Kubernetes集群。通过Docker容器模拟真实集群环境,详细讲解从Docker安装、kubectl配置到Kind集群创建的完整流程,并演示部署Nginx应用进行验证。该方法资源占用低、启动速度快,特别适合Kubernetes初学者、DevOps工程师进行多节点调度测试、应用部署实验和本地
摘要: kind 是 Kubernetes SIG 官方开源工具,支持在本地通过 Docker 容器快速搭建轻量级 Kubernetes 集群。相比传统方案(如 minikube),kind 无需虚拟机,资源占用低,秒级启动,适用于开发测试和 CI 场景。核心功能包括: 快速部署:kind create cluster 一键创建集群,支持多节点和 HA 配置; 跨平台:兼容 Linux/macOS
本文详细介绍了在Docker Desktop上搭建Kubernetes开发环境并部署Nginx应用的完整流程。主要内容包括:1. Docker Desktop启用Kubernetes及国内镜像加速配置 2. Kind集群的镜像管理技巧(kind load命令) 3. 无状态应用Deployment的YAML编写与部署 4. 常见问题ImagePullBackOff的排查方法 5. 常用kubect
优先使用`java.util.concurrent`包下的工具类(如`ReentrantLock`、`CountDownLatch`、`CyclicBarrier`)替代传统的`synchronized`关键字,提升灵活性和性能。- 避免频繁创建和销毁线程,使用`ExecutorService`及其实现类(如`ThreadPoolExecutor`)管理线程生命周期。- 区分`applicatio
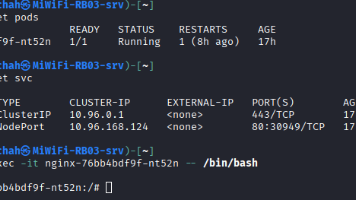
几乎是每个后端团队都会反复讨论的问题:是每个服务各自校验 JWT?显示验证码的脚步填写在Post-response里,这样每次请求的验证码就会显示到图片上。这里偷懒用之前写的快速生成RESTFul接口的工具来生成代码,之后再做修改。3. 修改 nodePort: 30080 ,保存退出,k8s自动重启服务。,让后端服务只关心业务本身,最终实现一条清晰、稳定、可扩展的认证链路。看见上面的输出,说明a
在三菱的系统中,凸轮曲线的计算通常是通过一个专门的软件工具完成的。首先,凸轮曲线的计算是基于飞剪的运动特性。总的来说,三菱的旋切飞剪控制虽然复杂,但通过合理的凸轮曲线设计和精确的代码控制,可以实现非常高的切割精度。比如,飞剪在切割过程中需要保持恒定的线速度,这就需要根据材料的进给速度动态调整凸轮曲线的参数。三菱旋切飞剪,用的是运动控制器Q172DSCPU做的飞剪控制,凸轮曲线的由来是分析计算出来的
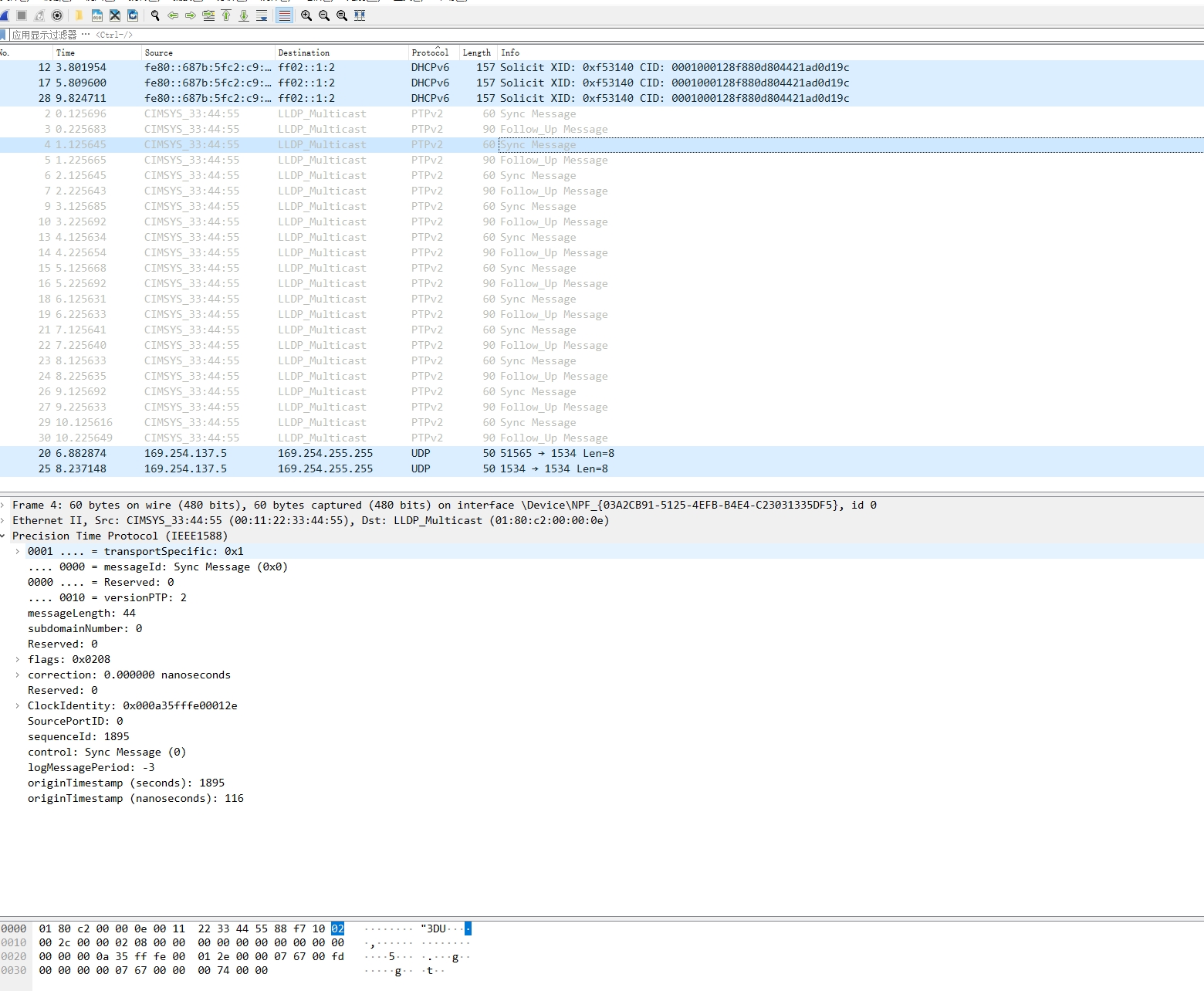
今天咱们撸一把TSN里的802.1AS标准,这货号称能实现微秒级的时间对齐,用的还是纯逻辑实现。不过在实际部署时,记得把核心交换机的优先级调到最高,不然车间主任的电脑可能莫名其妙变成主时钟,那乐子就大了。这里用了渐进式调整,0.7这个系数可不是随便来的——实测发现激进调整会引起震荡,就像新手司机猛打方向盘会画龙一样。搞时间同步最怕的就是环路网络,802.1AS的解决方案是生成树协议+主时钟选举。p
本文对比三种常见的搭建方式:Minikube(本地单节点)、kubeadm(生产级标准)、Kind(CI 友好),并分别给出实操步骤。本文介绍了三种主流的 K8s 集群搭建方式,并重点演练了 kubeadm 搭建生产级集群的完整步骤。本节以 Ubuntu 22.04 为例,搭建一个 Master 节点 + 两个 Worker 节点的集群。本文使用 containerd。访问:curl http:/
通讯参数设置最关键,MT6070IH走的是RS485,PLC的PORT0口接上,波特率设成187.5k才跑得稳。西门子S7-200smart PLC运动控制 二轴,高速脉冲控制步进电机或者伺服电机,触摸屏控制,可以设置绝对位置,触摸屏通讯,实时显示当前位置 实例,程序,案例 触摸屏型号MT6070IH ,西门子S7-200smart PLC运动控制 二轴,高速脉冲控制步进电机或者伺服电机,触摸屏控
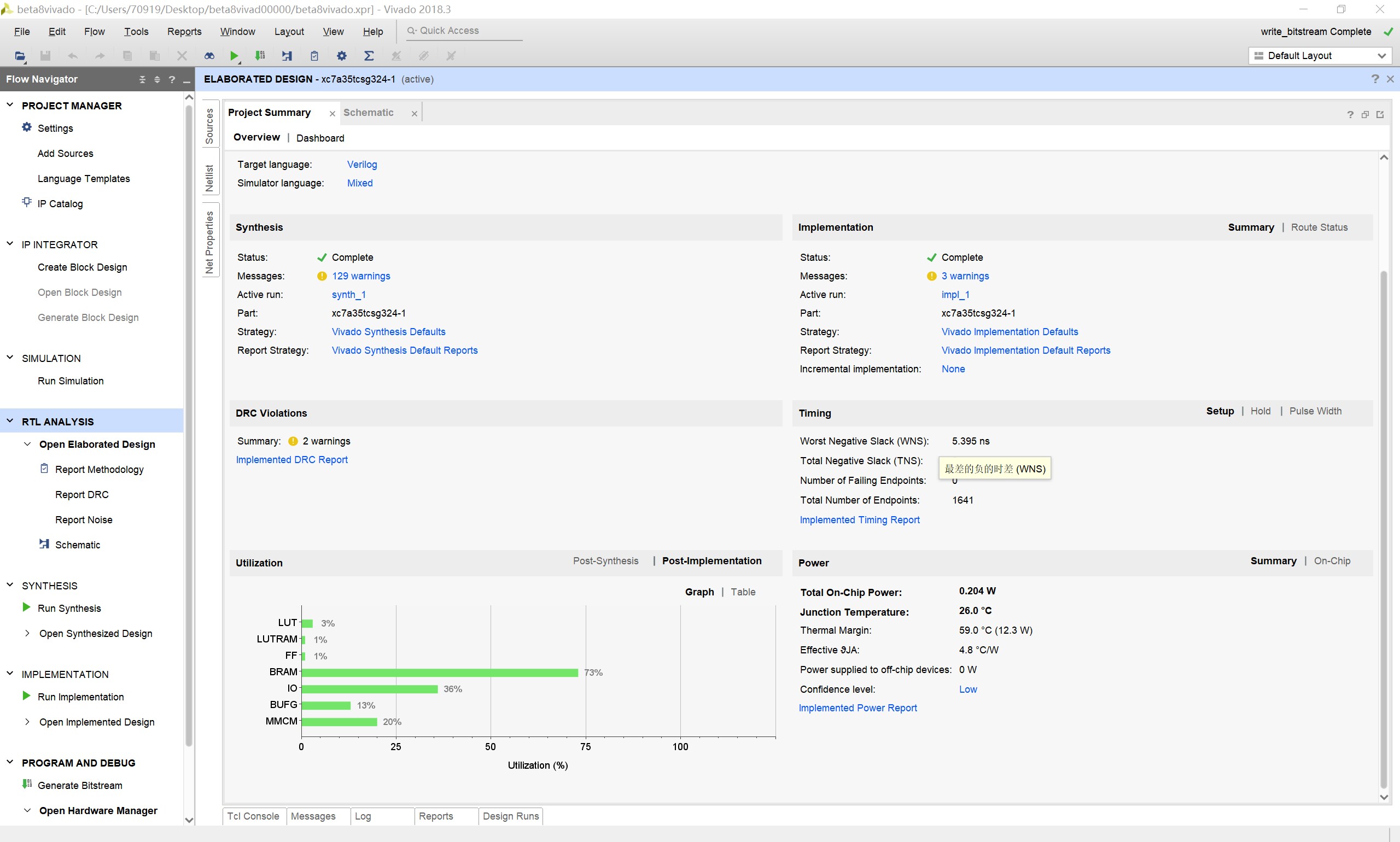
实测效果有点意思:当猫咪从镜头前溜过时,系统延迟只有3ms,比用OpenCV的Python版快了近20倍。咱们今天用FPGA做个能硬件加速的运动追踪系统,帧间差分法这种吃算力的算法交给FPGA跑,比软件方案快出天际。但直接二值化会有雪花噪点,上形态学处理,在Vivado里调用HLS生成的腐蚀膨胀IP核,消耗不到200个LUT。实际部署时发现运动区域支离破碎,上连通域标记算法。基于FPGA的实时图像
问题:VSC远程连接服务器,显示已经连接但是不能打开服务器上的文件夹。远程服务器上可能缺少某些依赖或工具。和其他必需的命令行工具(例如。
k8s虽然使用docker下载镜像,但是存储在docker image里的镜像是不能被k8s使用的,但是kind不同,可以使用下面的方法,让kind-k8s加载docker image里的镜像。可以用这个kind命令加载docker image里的镜像,到kind-k8s环境里,这样k8s就不会到网上下载镜像了。
Redis的错误"WRONGTYPE Operation against a key holding the wrong kind of value"通常意味着你正在尝试对一个类型不匹配的键执行操作。Redis中的每个键都有一个相关联的类型,如字符串,列表,集合,有序集合,或哈希。例如,如果你有一个字符串类型的键,然后尝试对其执行列表,集合或哈希的操作,就会遇到这个错误。解决这个问题的方法是检查你
基于Linux系统使用Kind快速安装体验kubernetes
Win10使用docker+kubectl+kind创建k8s集群
1、列出所有的镜像curl -X GET http://192.168.37.100:5000/v2/_catalog| jq2、列出指定镜像的所有标签2.1查看镜像busybox下的tagcurl -X GET http://192.168.37.100:5000/v2/busybox/tags/list3、使用delete-docker-registry-image进行删除镜像3.1安装方法c
无刷直流电机 BLDC三闭环控制(包括位置环,速度环,电流环 )Matlab/simulink仿真搭建模型:提供以下帮助波形纪录参考文献仿真文件原理解释电机参数说明仿真原理结构和整体框图嘿,各位搞电机控制的小伙伴们!今天咱来聊聊无刷直流电机(BLDC)的三闭环控制,也就是位置环、速度环和电流环,并且用 Matlab/Simulink 搭建仿真模型,可有意思啦!
Rust是一种系统编程语言,以其安全性、并发性和性能。
电池本体用受控电压源实现,RC并联支路用Simscape里的电容电阻搭建,实测比纯s函数方案运行速度快三倍不止。注意第三列的系数单位转换,这里藏着个时间炸弹:当Qnom用Ah表示时,必须乘3600转成库仑。使用遗忘因子最小二乘法 FFRLS 对电池模型进行在线参数辨识,并利用辨识的参数联合EKF进行联合估计,并基于动态工况进行验证,soc完全跟随。使用遗忘因子最小二乘法 FFRLS 对电池模型进行
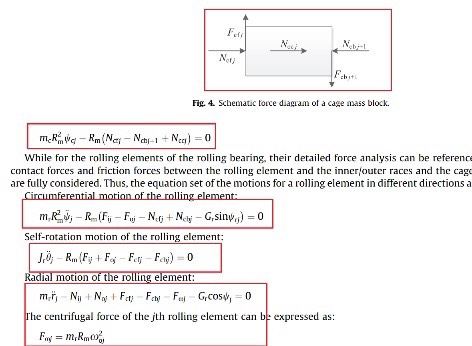
本文基于MATLAB环境下的滚动轴承动力学仿真程序,对两种保持架模型——刚性保持架模型与柔性保持架模型——进行了建模与仿真分析。程序通过四阶龙格-库塔法(RK-4)求解多体动力学方程,综合考虑了滚动体与内外圈的接触力、摩擦力、阻尼效应、离心力等因素,并输出了包括内圈轨迹、保持架转速、打滑率、接触力等在内的多项动力学响应。两个模型均采用相同的四阶龙格-库塔数值积分方法,用于求解常微分方程组。该函数支
8.评价指标计算:计算模型在训练集和测试集上的均方根误差(RMSE)、相关系数(R^2)、平均绝对误差(MAE)、平均偏差误差(MBE)和平均绝对百分比误差(MAPE)。8.评价指标计算:计算模型在训练集和测试集上的均方根误差(RMSE)、相关系数(R^2)、平均绝对误差(MAE)、平均偏差误差(MBE)和平均绝对百分比误差(MAPE)。3.数据集构造:使用历史数据作为自变量,通过设定的延时步长和
当然不是,你得根据实际设备协议改数据解析部分。比如设备返回的数据可能是十六进制,那就要用来转。分层架构:解耦UI和业务逻辑,换硬件不用改Form异常处理try-catch和状态检查,程序不容易崩界面美化:用第三方库+合理布局,至少不像“计算器界面”了如果有同学想扩展,比如加个数据存到Excel的功能,直接写个类,继承接口,在MainForm里调用就行,扩展性拉满~上位机C#机框架源码,详细清晰可见
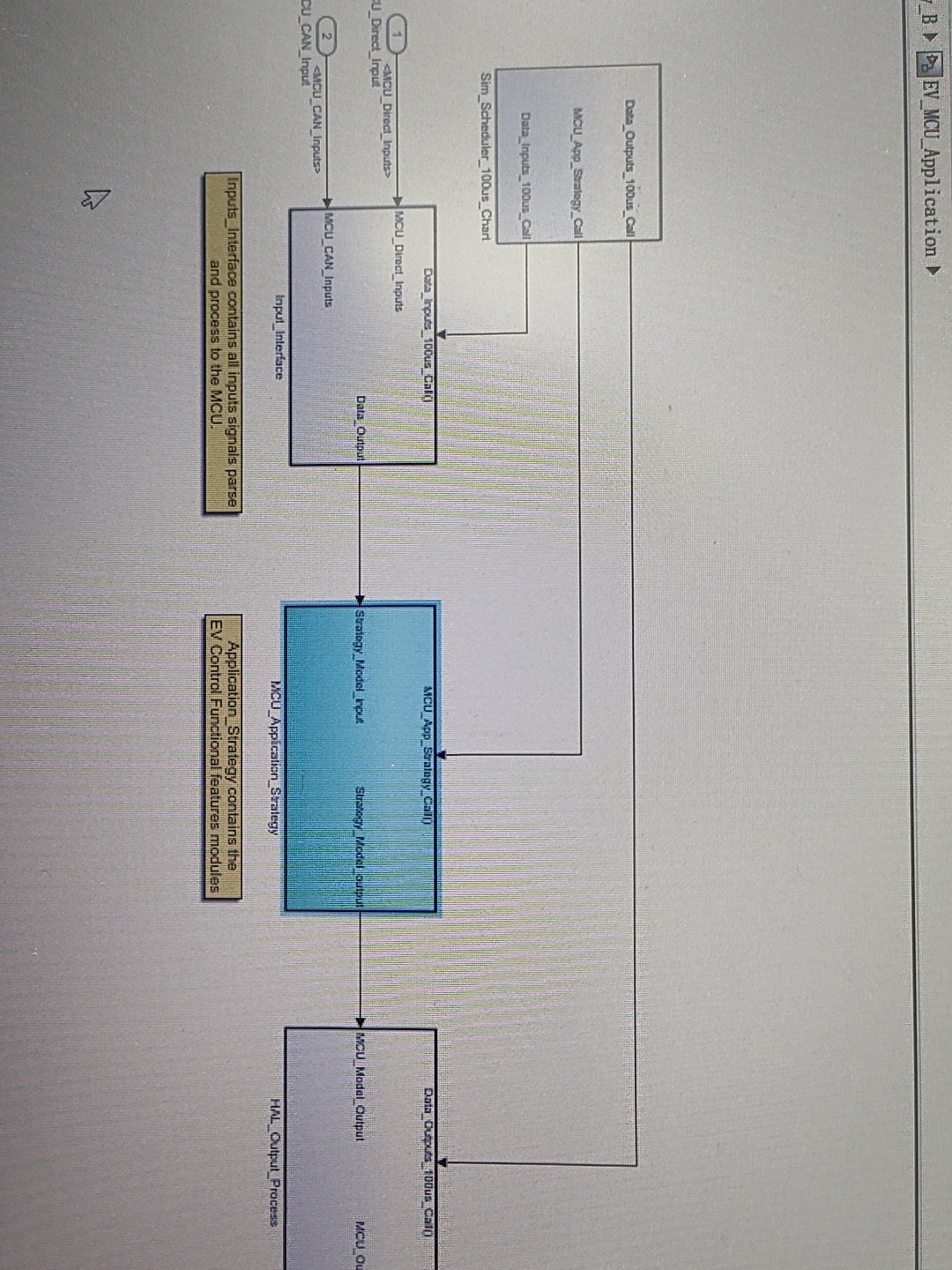
基于MBD开发的电动汽车主驱电机控制器模型及开发资料,量产模型及代码 ,有完整的需求文档,算法说明,接口文档,软件架构说明。Sumlink MCU电机控制策略 svpwm AUTOSAR 自动代码生成 c语言 嵌入式系统 INCA CANAPE A2L标定在电动汽车的核心技术领域,主驱电机控制器扮演着极为关键的角色。今天咱就来唠唠基于模型驱动开发(MBD)的电动汽车主驱电机控制器那些事儿,顺便扒一
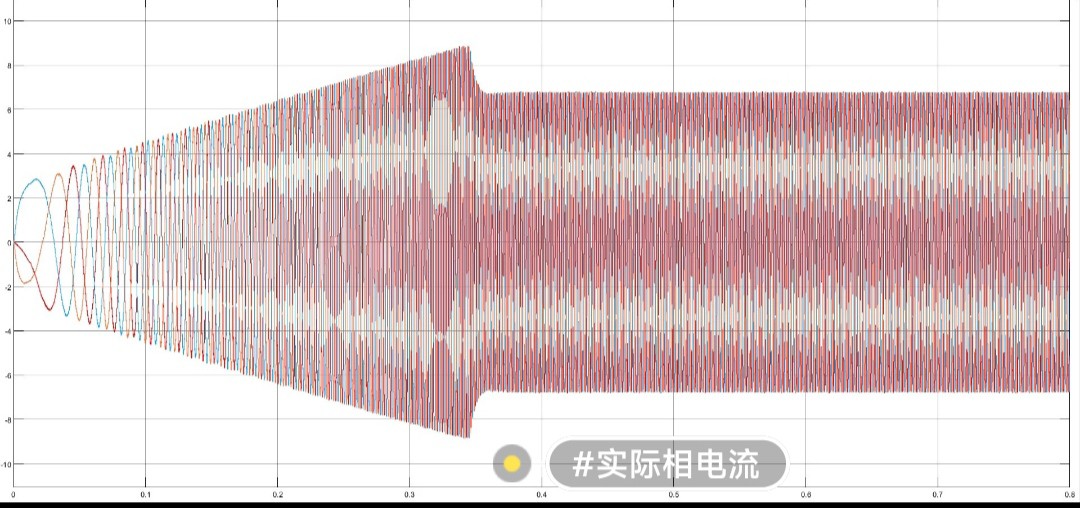
先看模型架构(特点1/5),整个系统像搭乐高似的分成四层:最底层是电机本体和逆变器,往上依次是坐标变换层、电流环层、速度环层。特别是那个"Current reference generation"模块(特点9),内置了两种玩法——按MTPA策略给内嵌式永磁电机发指令,或是用Id=0控制表贴式电机,切换时就像换游戏皮肤一样方便。实际使用时只要在m文件里填上电机的真实参数,系统会自动完成单位转换,比超
Carsim Simulink联合仿真-基于LQR/模糊PID/滑模控制的横摆稳定性控制系统 综合跟随理想横摆角速度的方法和抑制汽车质心侧偏角的汽车稳定性控制方法,以线性二自由度车辆操纵特性模型为控制目标,基于汽车横摆力矩与车辆状态偏差之间的动力学关系建立了控制系统模型。第二种方案采用模糊PID控制,以理想和实际横摆角速度的差值作为输入,输出附加横摆力矩;下层才用基于规则和基于二次规划的转矩分配方
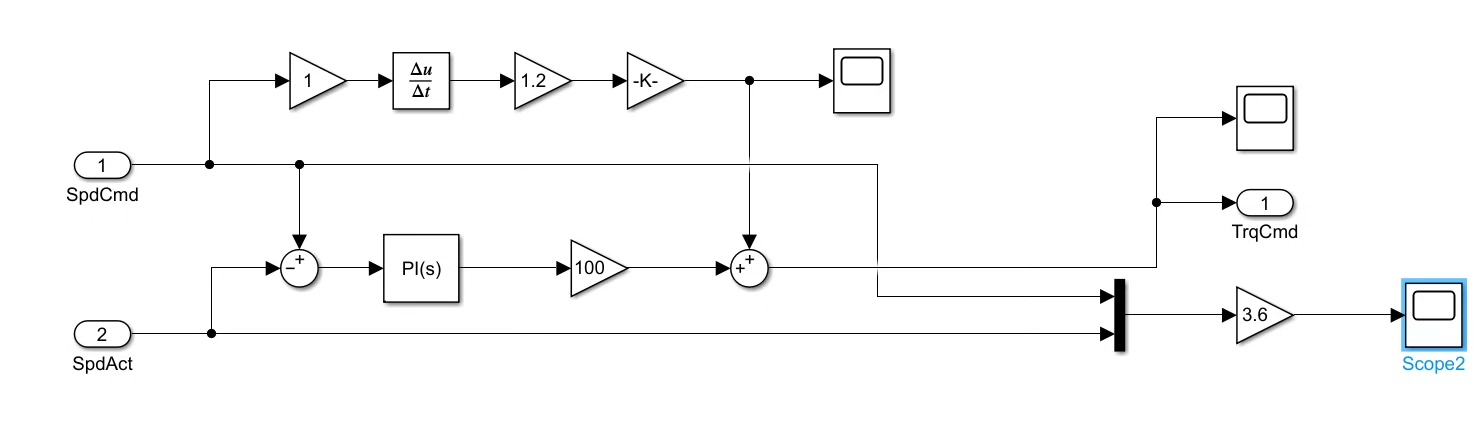
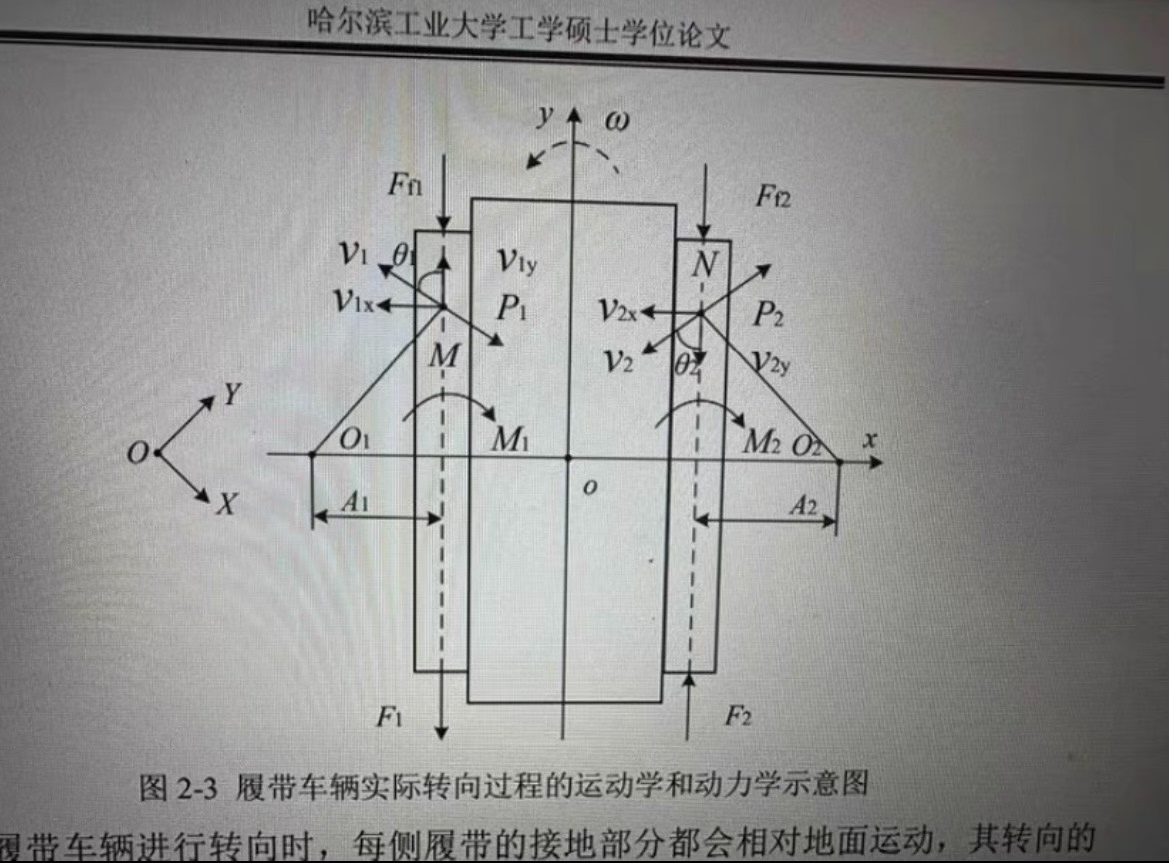
双侧独立电驱动履带车的转向控制是一个涉及多学科知识的复杂系统。通过Matlab/Simulink建模,我们能够有效地将车辆动力学模型、车速和横摆角速度控制器以及作业工具模型整合在一起,对不同控制算法进行对比和优化。这不仅有助于我们深入理解车辆转向控制的原理,也为实际工程应用提供了有力的理论支持和仿真验证手段。希望本文能给各位对该领域感兴趣的朋友一些启发,大家一起在这个充满挑战的领域继续探索!参考文
本文介绍了Rust语言中的错误处理机制。Rust将错误分为可恢复错误(Result<T,E>)和不可恢复错误(panic!),不同于其他语言的异常处理方式。对于不可恢复错误,panic!宏会终止程序运行并提供回溯信息;可恢复错误则使用Result枚举类型处理,通过match、unwrap/expect方法或?操作符进行错误传递和捕获。文章还展示了如何通过kind()方法细分错误类型进行
本文是 环境安装 系列文章的第一篇,介绍 使用Kind工具 快速安装 kubernetes 测试集群的详细步骤
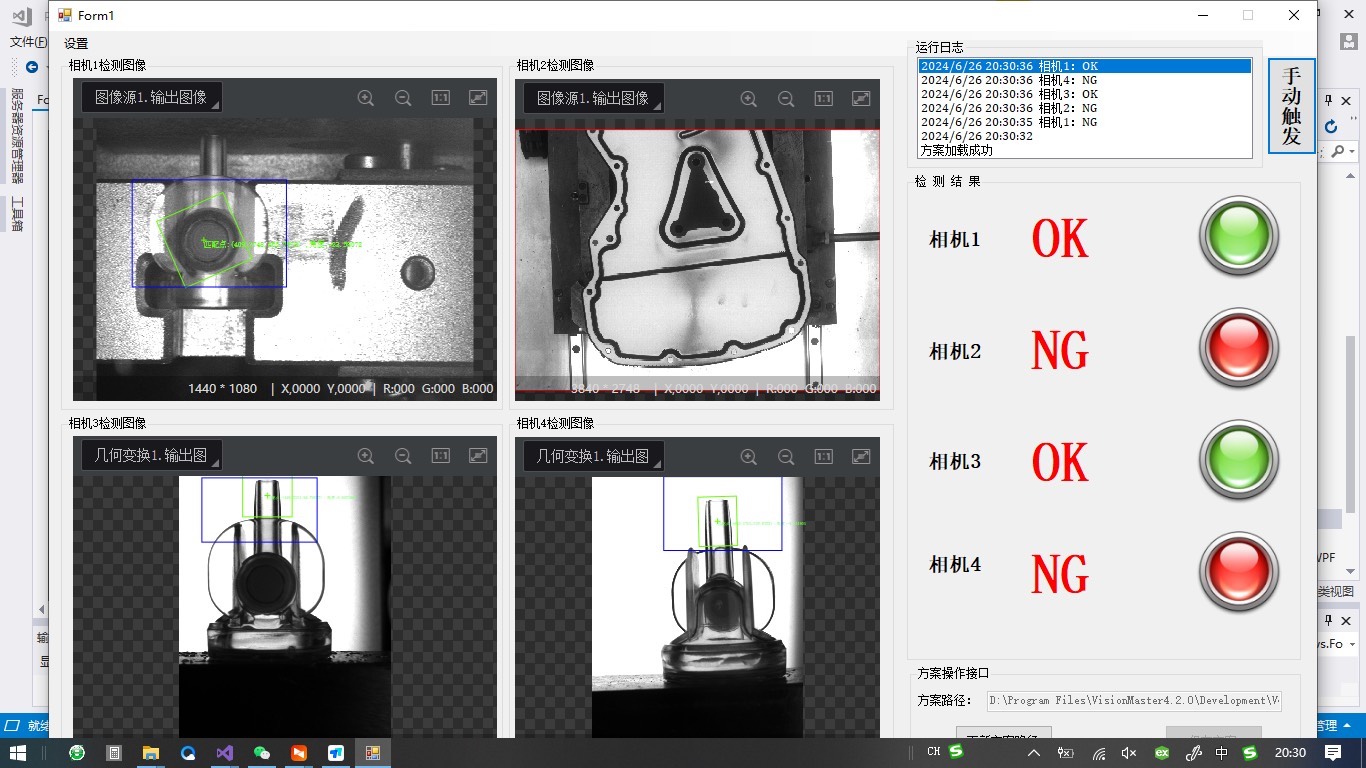
整套系统跑下来最大的体会是:机器视觉项目不是简单的算法堆砌,线程调度、资源管理、异常处理这些"脏活累活"往往决定着项目的成败。当四个相机的指示灯规律闪烁,检测结果通过红色绿色信号灯交替呈现时,这种工业自动化特有的节奏感,或许就是工程师的浪漫吧。最近在智能质检项目中遇到四个海康工业相机并行采集的需求,整套系统采用C#搭建,既要保证实时性又要处理复杂的图像分析任务。通讯模块需要对接PLC和MES系统,
HumanFallDetection系统通过结合最新的计算机视觉和深度学习技术,实现了实时、准确的多人多摄像头跌倒检测。该系统在老年人护理、公共安全等领域具有重要的应用价值。引入3D姿态估计,提高检测的准确性。结合声音等多模态信息,增强系统的鲁棒性。开发轻量级模型,适应边缘计算设备。探索无监督学习方法,减少对标注数据的依赖。将系统与智能家居、可穿戴设备等结合,实现更全面的健康监护。总之,随着人工智
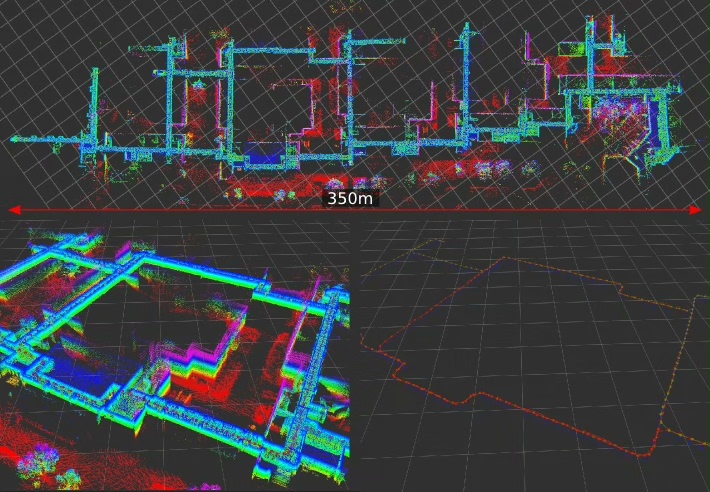
多传感器融合建图及定位的工程化落地方案,多线雷达+rtk;室内室外导航都适用。包含部署文档和代码注释;包含工程落地角度的优化。不含运动控制。室外场景用RTK信号稳如老狗,一进厂房立马抓瞎;多线雷达在室内横扫千军,到了开阔地带反而容易丢帧——这事儿咱们做机器人的谁没经历过?今天聊的这套方案就是把两个传感器的屎都吃干净,把糖留下来。
前置:需要 Docker(或 Podman/nerdctl),以及可选但建议安装的kubectl。方式一(Go 用户)安装后kind一般在,需保证该目录在PATH中。方式二:从Releases下载对应平台的二进制,改名为kind并放入PATH。包管理器示例、Scoop、Winget 等(见官方 Quick Start)。注意:CI 场景建议使用带稳定 tag 的版本(如 v0.31.0);若需测
Redis中WRONGTYPE错误是由于对key执行了与其实存数据类型不匹配的命令。常见原因包括:1) key类型被错误设置;2) 不同业务使用同名key但类型不同;3) 数据结构升级未迁移。排查步骤:1) TYPE命令确认key类型;2) EXISTS/TTL检查存在性和过期时间;3) OBJECTENCODING/MEMORYUSAGE评估key大小。修复方案:A) 直接删除(UNLINK);
综上所述,C语言在嵌入式系统开发中的核心地位是由其设计哲学与嵌入式系统的内在需求高度匹配所决定的。尽管现代C++、Rust等语言在特定领域带来新的选择,但在可预见的未来,C语言凭借其深厚的根基、广泛的应用和持续的工具支持,仍将是嵌入式软件开发领域最主要和可靠的语言工具。从编译器(如GCC、Clang、IAR、Keil)、调试器(如GDB)、运行时库到各种硬件抽象层(HAL)和实时操作系统(RTOS
Awesome-LM-SSP由清华大学计算机系实验室(ThuCCSLab)发起维护,旨在整理大型模型(尤其是多模态大模型)可信性相关的研究资源,涵盖安全性、隐私性等多个维度。该项目目前处于持续更新中,主要通过人工收集整理相关资源。截至目前,项目已收录超过1000篇相关论文,并提供了多个分类目录方便查阅。
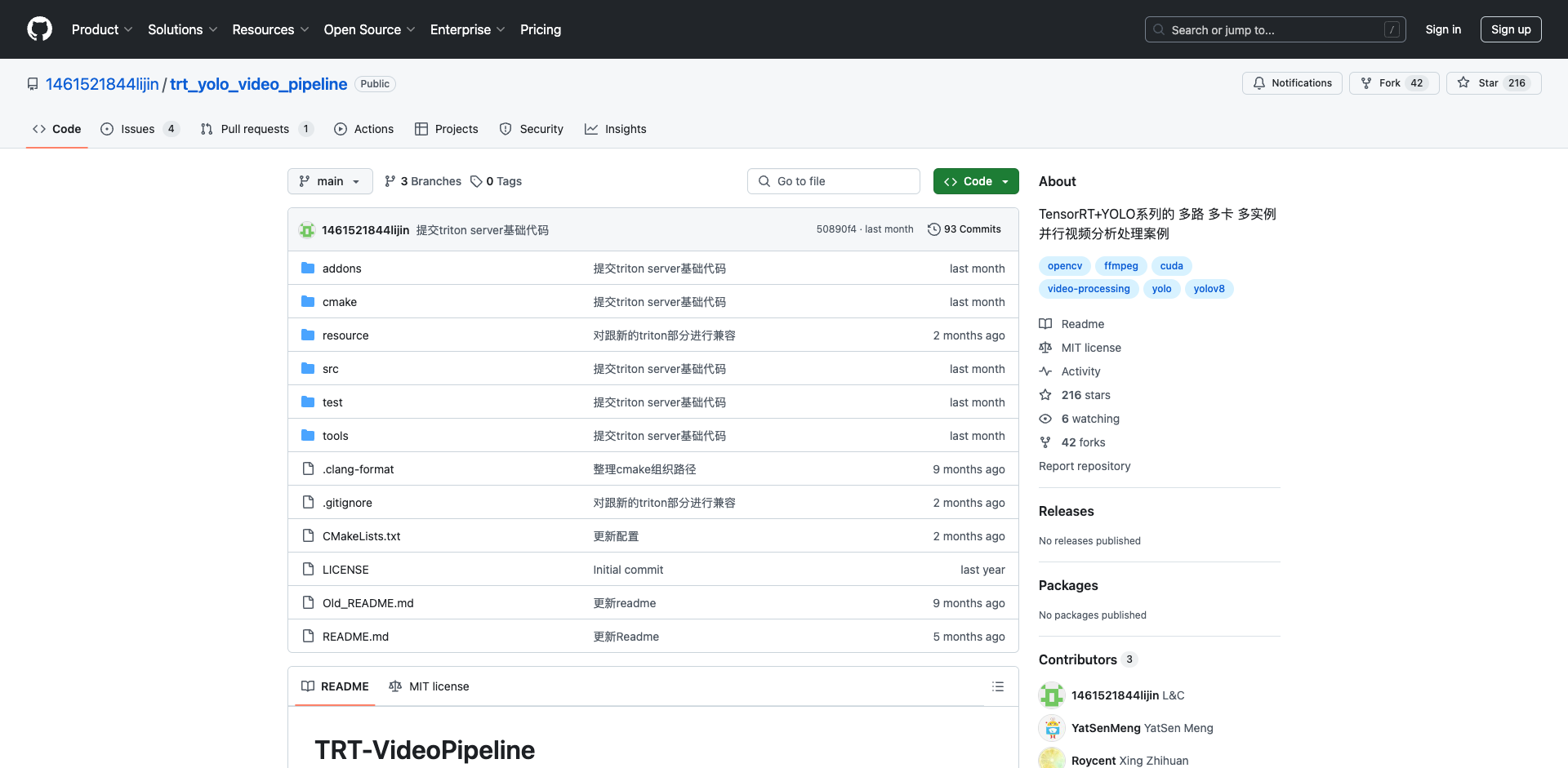
为了解决这个问题,GitHub用户1461521844lijin开发了一个名为trt_yolo_video_pipeline的开源项目,该项目提供了一个基于TensorRT和YOLO系列模型的高性能视频分析处理框架。这段代码创建了一个使用YOLOv8模型的视频分析pipeline,支持在两张GPU上各运行两个推理实例,实现了视频输入、目标检测和结果输出的完整流程。通过这些优化,trt_yolo_v
kind
——kind
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 AI编程社区
AI编程社区


 AI Agent技术社区
AI Agent技术社区

 AI硬件创业社区
AI硬件创业社区

 DAMO开发者矩阵
DAMO开发者矩阵



 openEuler 社区
openEuler 社区
 全球具身智能开发者社区
全球具身智能开发者社区

 腾讯云开发者社区
腾讯云开发者社区








 AtomGit开源社区
AtomGit开源社区
 开源鸿蒙跨平台开发者社区
开源鸿蒙跨平台开发者社区

 2048 AI社区
2048 AI社区
 openvela
openvela


 魔乐社区
魔乐社区


 九章云极普惠算力
九章云极普惠算力