




- @weixin_44378835
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
文章目录1 Proximal Policy Optimization(PPO)1,1Policy Gradient(PG)1.2 TIP to PG1.2.1 Tip1 Add a baseline1.2.2 Tip2 Assign Suitable Credit1 Proximal Policy Optimization(PPO)将Policy Gradient(PG)从On-policy变为O
文章目录1 Actor-Critic1.1 前言1.2 Actor-Critic1.3 Advantage Actor-Critic1.4 Asynchronous Advantage Actor-Critic(A3C)1.5 Pathwise Derivative Policy Gradient(PDPG)1 Actor-CriticAdvantage Actor-Critic:A2CAsync
人工神经元网络的基本概念首先我们从人脑发挥功能的最基本的单元,即神经元的模型出发,来了解神经网络分类器究竟是如何发挥作用的。人工神经元是生物神经元的模拟模型。生物神经元包括四个主要部分:细胞体、树突、轴突和突触。树突的作用是用于接受周围其他神经元传入的神经冲动。轴突的功能是通过轴突末梢向其他神经元传出神经冲动。每个神经细胞所产生和传递的基本信息是兴奋或抑制。在两个神经细胞之间的相互接触点称为突触。
位置与姿态描述2 二维空间位姿描述讨论2维空间通常要用到笛卡儿坐标系,笛卡儿坐标系是以xxx轴和yyy轴为正交轴的坐标系,通常绘制成xxx轴水平、yyy轴竖直,两轴的交点称为原点。在笛卡尔坐标系中,平行于坐标轴的单位向量x^\hat{x}x^和y^\hat{y}y^表示。一个点用其在xxx轴和yyy轴上的坐标(x,y)(x,y)(x,y)表示,或者写成向量:p=xx^+yy^\boldsymbo
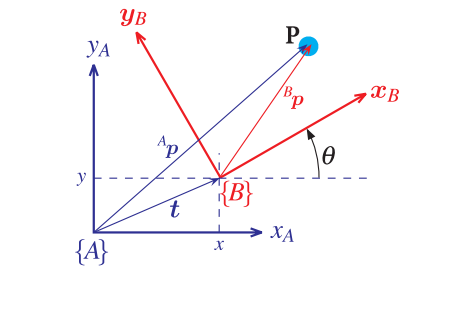
位置与姿态描述1 位姿的抽象符号表示提示:在本节中,我们会用到这几个抽象的符号:“ξ\xiξ”、“·”和“⊕\oplus⊕”。读者只需直到它们的作用就行,在后面会将其转化为MATLAB中实现的标准的数学对象和运算符。机器人和计算机视觉中的一个基本要求是能够表示物体在环境中的位置和方向。这些物体包括机器人、摄像机、工件、障碍物和路径。空间中的点可以被描述为一个坐标向量,也被称为一个约束向量。如下图所
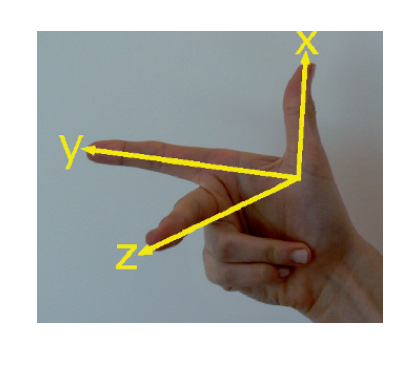
文章目录位置与姿态描述3 三维空间位姿描述3.1 三维空间姿态描述3.1.1 正交旋转矩阵3.1.2 三角度表示法3.1.3 双向量表示法3.1.4 绕任意向量旋转3.1.5 单位四元数3.2 平移与旋转组合3.2.1 四元数向量对3.2.2 4×4齐次变换矩阵位置与姿态描述3 三维空间位姿描述三维情况实际上是前一节讨论的二维情况的延伸。我们在二维坐标系上增加一个额外的坐标轴,通常用zzz表示,它
Aster(A*)算法Aster算法是在Dijkstra算法基础上发展出来的,是在静态路径中用于求解最优路径有效的直接搜索算法,比dijkstra算法多了一个启发式的搜索函数,也就是通过一个代价函数来确定搜索方向(从起点开始向周围扩张,通过代价函数,计算得到周围每个节点的代价值,选出最小代价节点作为下一个扩展点,重复这个过程直到到达目标点。)。算法对比:A∗A^*A∗算法的代价函数f(n)...
文章目录豪斯多夫距离(Hausdorff distance)引言Hausdorff距离豪斯多夫距离(Hausdorff distance)引言当谈到距离时,我们通常指的是最短的距离:例如,如果说一个点XXX距离多边形PPP的距离为DDD,我们通常假设DDD是XXX到PPP的最近点的距离。同样的逻辑也适用于两个多边形:对于两个多边形AAA和BBB,我们通常将它们的距离理解为AAA的任意点和BBB的任
概率与分布(Probability and Distributions)(中)6.4 概括性统计和独立性我们通常对概括随机变量集和比较随机变量对感兴趣。随机变量的统计量是该随机变量确定的函数。分布的概括性统计量为随机变量的行为提供了一个有用的视角,顾名思义,它用数字概括和描述分布。我们将描述均值和方差这两个众所周知的概括性统计量。然后讨论比较一对随机变量的两种方法:一是如何说明两个随机变量是独立的