




- @weixin_40293999
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
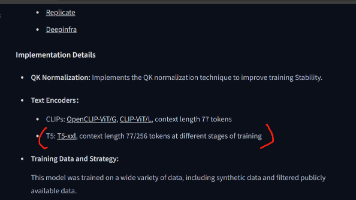
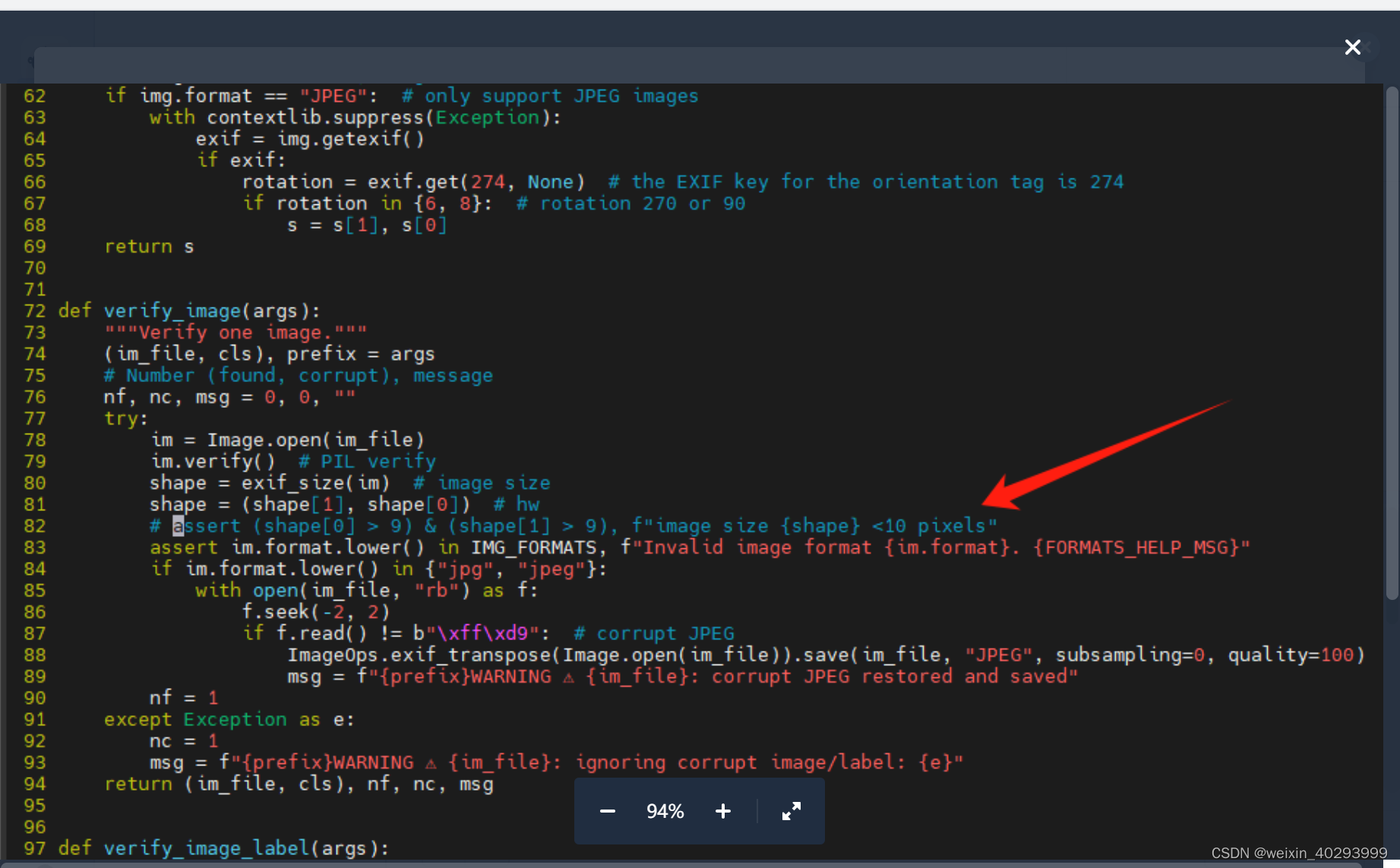
本文记录了使用Stable Diffusion 3.5进行微调训练的过程。主要包括HuggingFace模型链接、token突破77限制的问题(可使用T5-XXL实现256 tokens)、安装注意事项(需移除版本约束)、训练代码来源(diffusers库)以及训练命令示例。文中提到在训练过程中遇到了模型加载错误,并提供了相关错误日志。还收集了fine-tuning指南、GitHub项目地址和数据
很长时间没有做yolov的项目了,最近一看yolov8有一个区域计数的功能,不得不说很实用啊。b站:https://www.bilibili.com/video/BV1Ng4y1d7Yr/?

from shapely.geometry import Polygon# 多边形p1的坐标p1 = Polygon([(0,0), (1,1), (1,0)])# 多边形p2的坐标p2 = Polygon([(0,1), (1,0), (1,1)])# 计算p1和p2是否相交,返回true、flasep1.intersects(p2)# 计算p1 p2的交集点,返回0.5 为单位的交集点p1.i
记得加入-g参数 否则进不去调试模型gdb 目标程序此时进入了gdb调试模式下set args 设置程序运行的参数ub 20 表示在第20行设置断点,可以设置多个断点r 表示开始运行程序,程序运行到断点的位置会停下来。如果没有遇到断定会一直运行下去n next, 执行当前语句,若是函数调用,则不会进入函数内部。

参数:n,整数,要选择的行数,调用者对象的最后 n 行。例如,n=5,就是返回最后5行数据。pandas 没有python的倒序切片功能,用这种方式实现的。
我截了一个人形图,把它送到yolov里面使用,然后出了这个warning,这是因为经历了5次下采样,所以必须是32的倍数。所以640的默认是正确的。

兜兜转转,原本以为和yolov没啥关系了,但是新公司又回到了yolov侧。yolov8 可以用pip的方式安装,以package的三方软件包形式,隐藏了很多细节。当然你也可以从git上把全套代码down下来。
vmware workstation pro 17.5 安装 macos 13.5.2 虚拟机超详细图文教程_vmware workstation 17.5.0 pro unlocker & oem bios -CSDN博客
投稿格式要求:IEEE - Manuscript Templates for Conference Proceedings投稿网址:Conference Management Toolkit - Login