登录社区云,与社区用户共同成长
邀请您加入社区
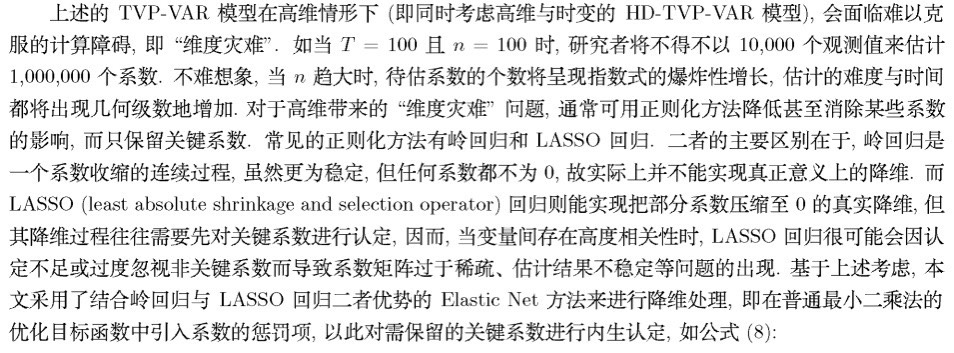
优势:通过Elastic Net方法进行降维处理,能够计算高维数据DY溢出指数,相较于传统TVP-VAR-BK模型只能计算最多20个变量,HD-TVP-VAR-BK可同时估计近百个变量,相较于Lasso BK,Elastic Net BK(弹性网络),HD-TVP-VAR-BK为时变估计,不用损失滚动窗口,且运行速度相对较快。股票市场数据用36期比较稳。R语言代码,有注释和案例数据,能导出静态溢出
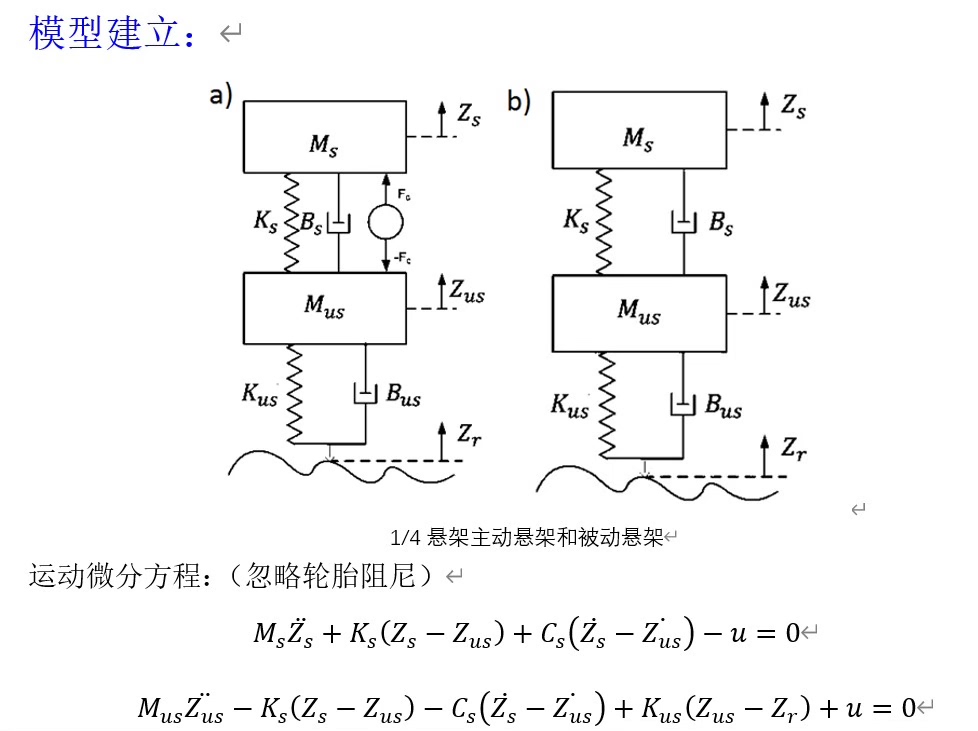
通过上述讨论可以看出,MPC 控制器在主动悬架系统中的应用具有显著的优势。无论是 2自由度还是 4自由度的模型,MPC 都能够通过滚动优化的方式,实现对车身加速度、动挠度和俯仰角速度的精确控制。随着计算能力的提升,MPC 算法在汽车悬架系统中的应用前景更加广阔。基于深度学习的方法,进一步提高路面预知和控制精度。多约束优化方法,以平衡控制性能和能耗。实时 MPC 算法,降低计算复杂度以适应更高采样的
敏捷研发的管理涉及多个方面,包括快速响应变化、持续改进和紧密合作等。在这个过程中,钉钉项目Teambition作为一种高效的团队协作工具,能够显著提升开发协作的敏捷性。以下是对敏捷研发管理和钉钉项目Teambition在敏捷开发中的应用的详细阐述:在 Teambition 的敏捷研发项目中默认开启「任务」应用,全面支持「看板」和「Scrum」敏捷方法,你可以围绕产品目标灵活规划每个迭代冲刺。可以直
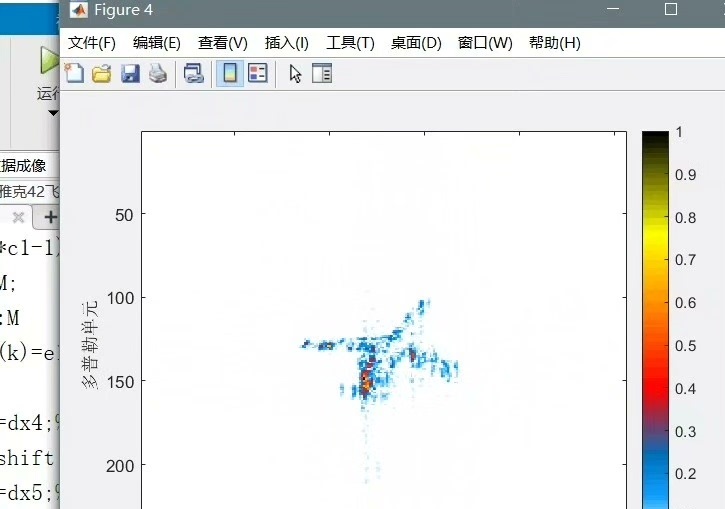
本文档旨在全面解析一套完整的逆合成孔径雷达(ISAR)系统,涵盖从原始回波建模、运动补偿、二维成像、散射点提取到调频率估计与图像定标的全流程。该系统不仅适用于仿真场景,也支持实测数据处理,并融合了轨道动力学模型(SGP4)用于空间目标的高精度定标。回波建模与成像预处理运动补偿二维ISAR成像散射点自动提取调频率估计与图像定标以下将逐模块展开详细说明。本ISAR系统集成了建模、成像、特征提取、参数估
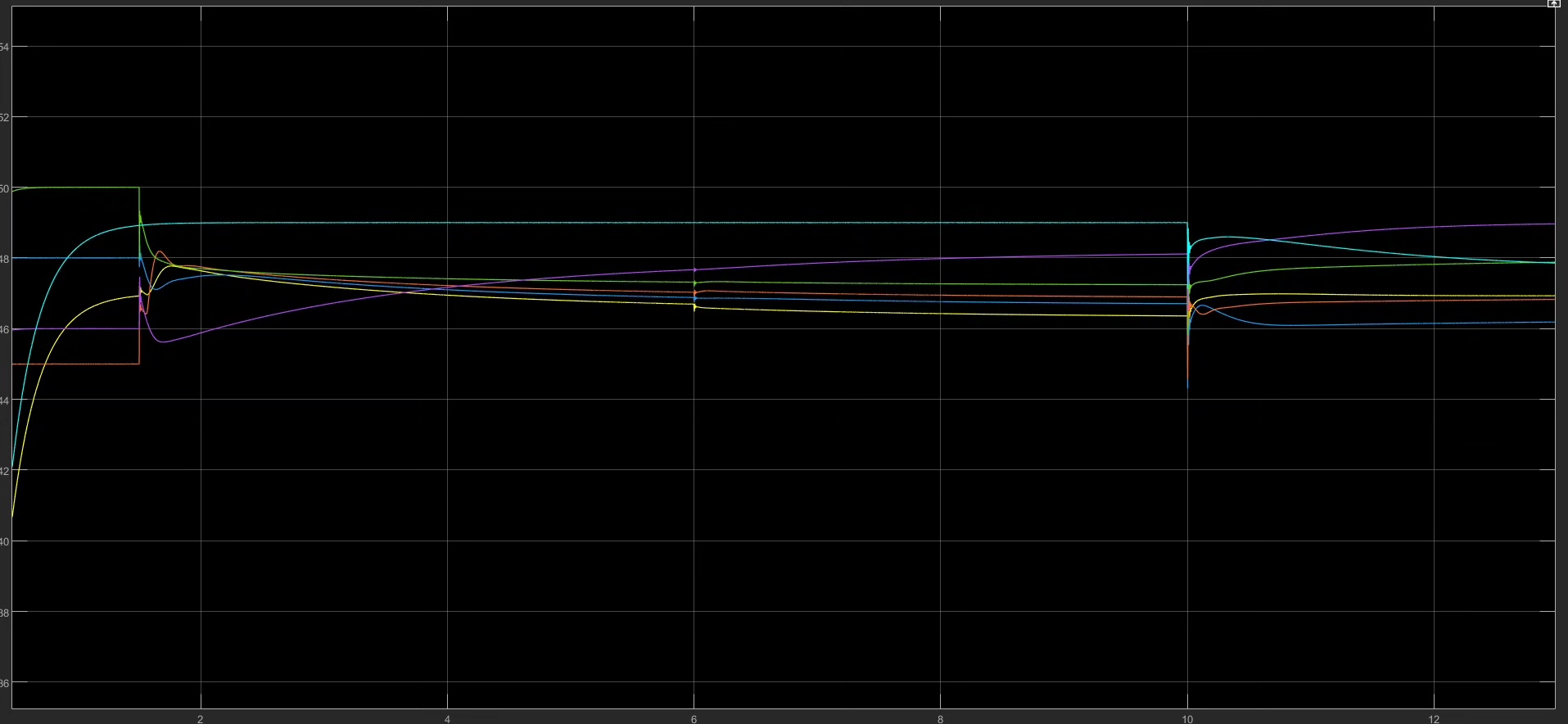
关键词:一致性算法;直流微电网;下垂控制;分布式二次控制;电压电流恢复与均分;非线性负载;顶刊复现,有意者;本模型不,运行时间较长耐心等待主题:提出了一种新的基于一致性算法的直流微电网均流和均压二级控制方案,该微电网由分布式电源、动态RLC和非线性ZIE(恒阻抗、恒电流和指数型)负载组成分布式二级控制器位于初级电压控制层(下垂控制层)之上,并利用通过与邻居通信来计算必要的控制动作除了表明在稳定状态
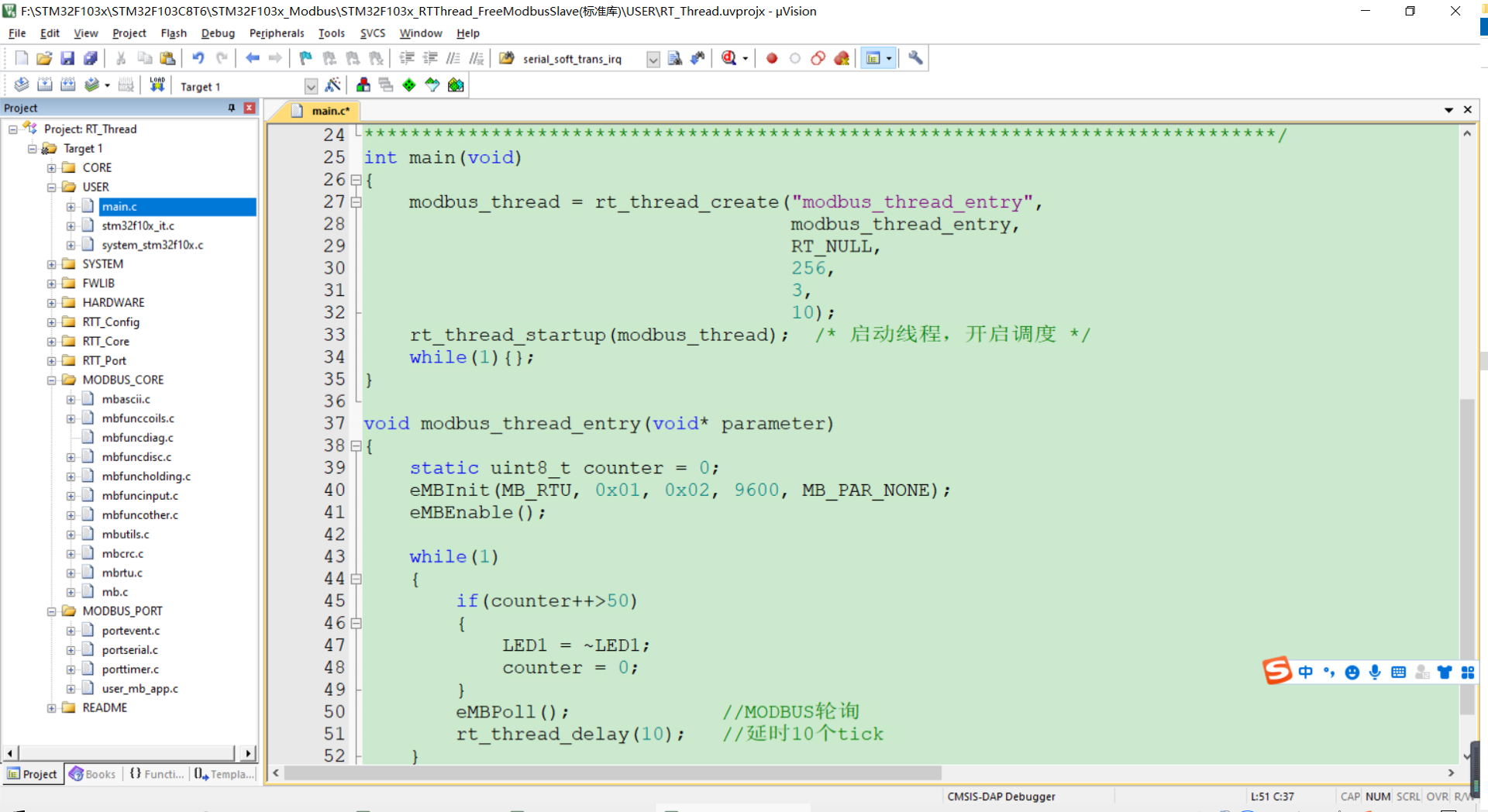
移植带操作系统的资料(FreeRTOS、RT_Thread),源码都测试过可以使用,工程规范、逻辑清楚、可以快速移植的自己的板子,学习MODBUS通信协。移植带操作系统的资料(FreeRTOS、RT_Thread),源码都测试过可以使用,工程规范、逻辑清楚、可以快速移植的自己的板子,学习MODBUS通信协。RT-Thread用户更省事,用ENV工具直接装FreeModbus软件包,menuconf
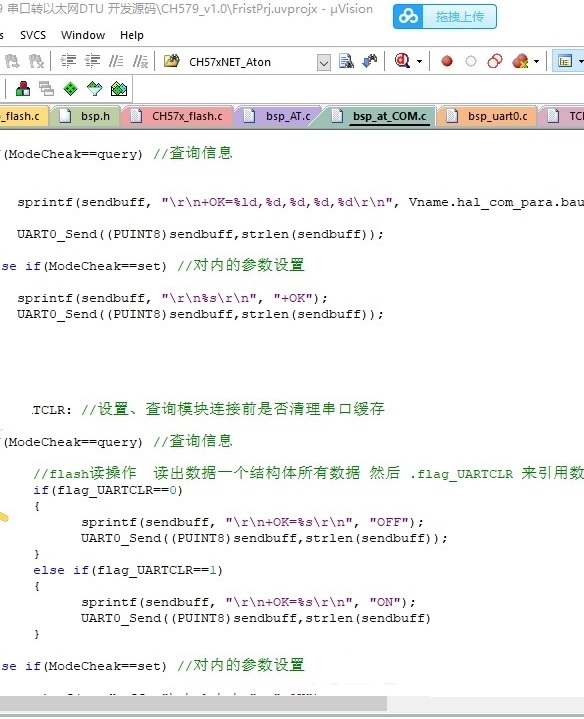
CH579串口服务器DTU项目是一个基于WCH CH579芯片的综合性嵌入式系统解决方案,集成了以太网转串口功能、BLE Mesh蓝牙 mesh网络支持,以及多种传感器数据采集能力。该项目展示了CH579芯片在物联网网关设备中的强大应用潜力。
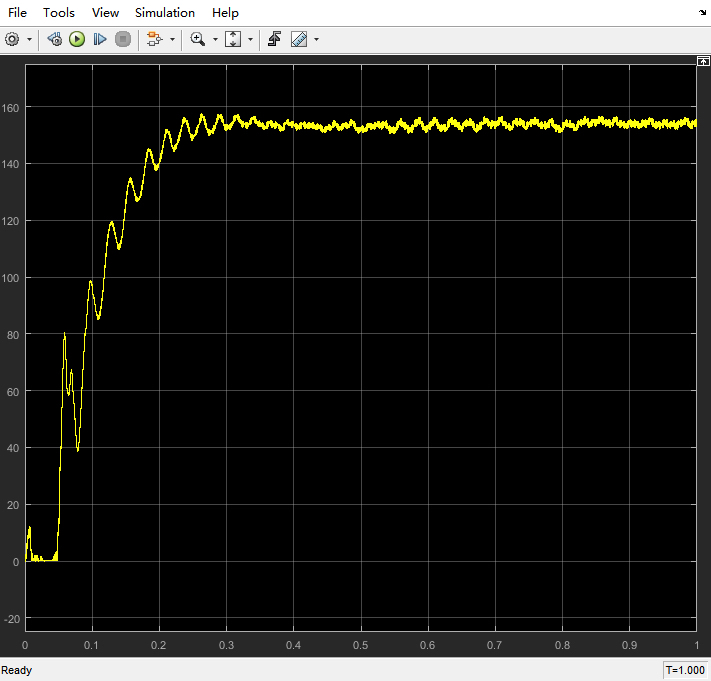
通过在Matlab2016的Simulink中对双馈风力发电机模型的研究与仿真,我们能够深入理解DFIG的运行原理和控制策略。给定风速变化下的电流电压波形分析,也为实际风力发电系统的设计和优化提供了有力的参考。当然,实际应用中还需要考虑更多复杂因素,如电网故障、环境干扰等,但这个基础的仿真模型已经为我们打开了DFIG研究的大门。希望本文对大家在DFIG相关研究和实践中有所帮助。
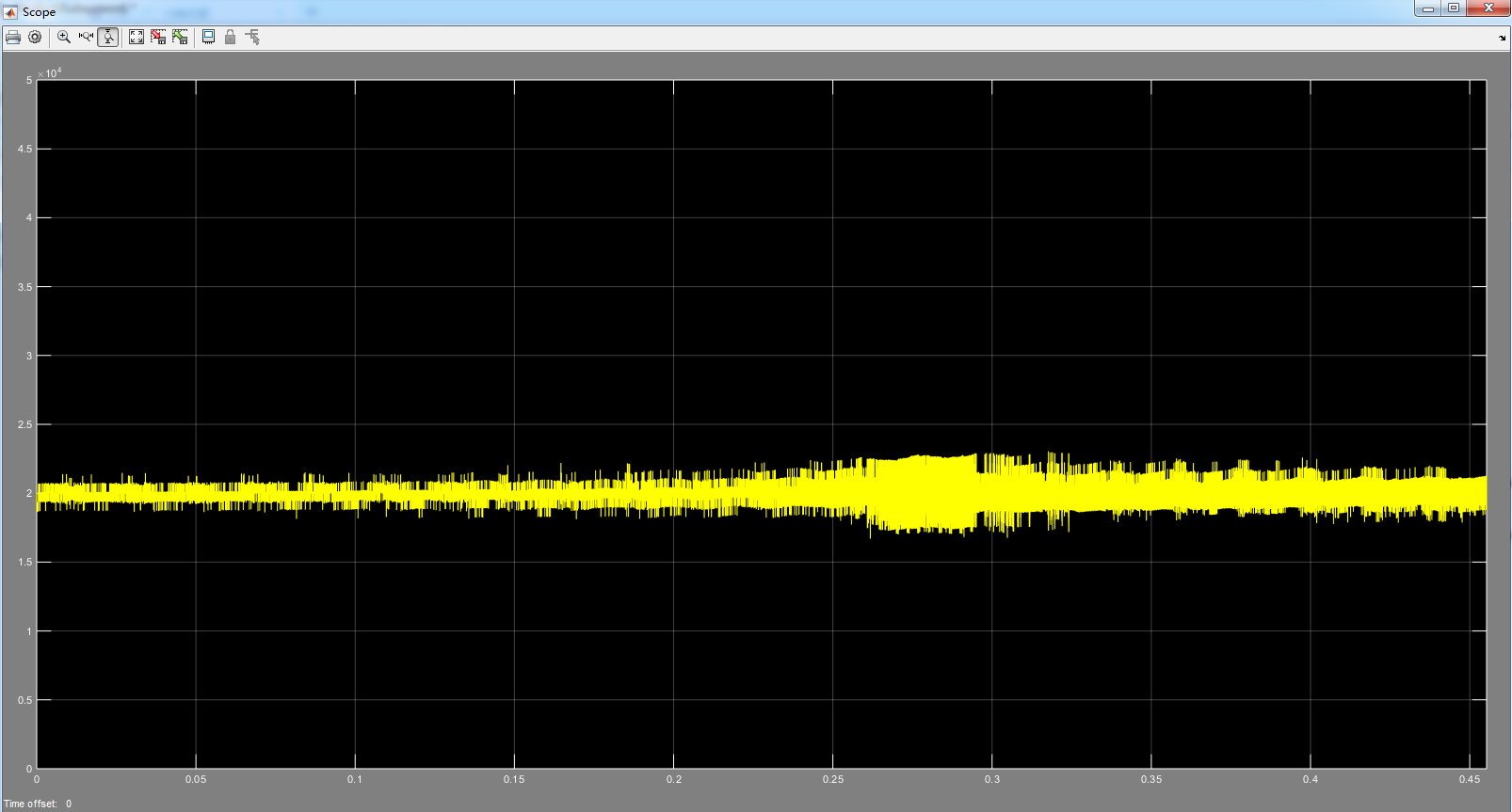
MATLAB代码:高压直流输电关键词:MMC- HVDC,预测控制,电容均压两端MMC- HVDC输电模型是基于MAT LAB/simulink软件搭建的。下图的第一个和第二个模块分别是两侧的MMC模型,该模型的控制使用的是MPC控制策略,控制器是用C代码写的。同时,控制模型中用了电容电压均压策略。该模型的电压等级是20kV,上下子模块数量各10个,第3-5分别是三相电容电压的波形,其基本在2KV
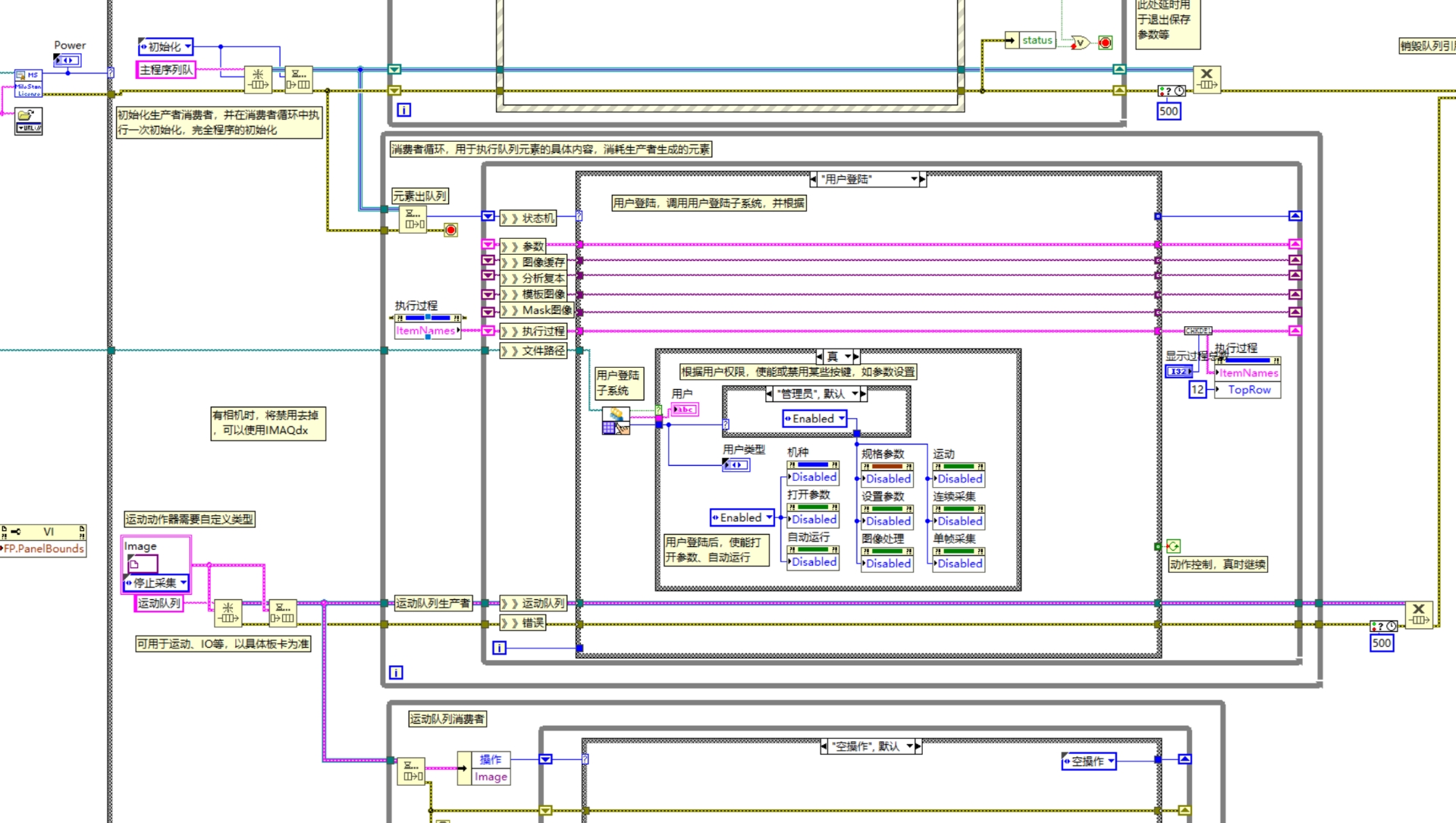
特别是在处理图像数组的时候,给IMAQ ImageToArray.vi加上探针,实时看到像素矩阵的变化比啥文档都好使。注意第二个参数的结构元素选型,矩形核适合直角特征的检测,要是做圆形零件检测记得换成IMAQ_Circle。我在汽车零件检测项目里用过这套逻辑,现场换了三家不同厂商的工业相机都能无缝切换,甲方爸爸直呼专业。这套架构在新能源电池片检测项目里验证过,同一套算法换产线时,工艺员自己改配置文
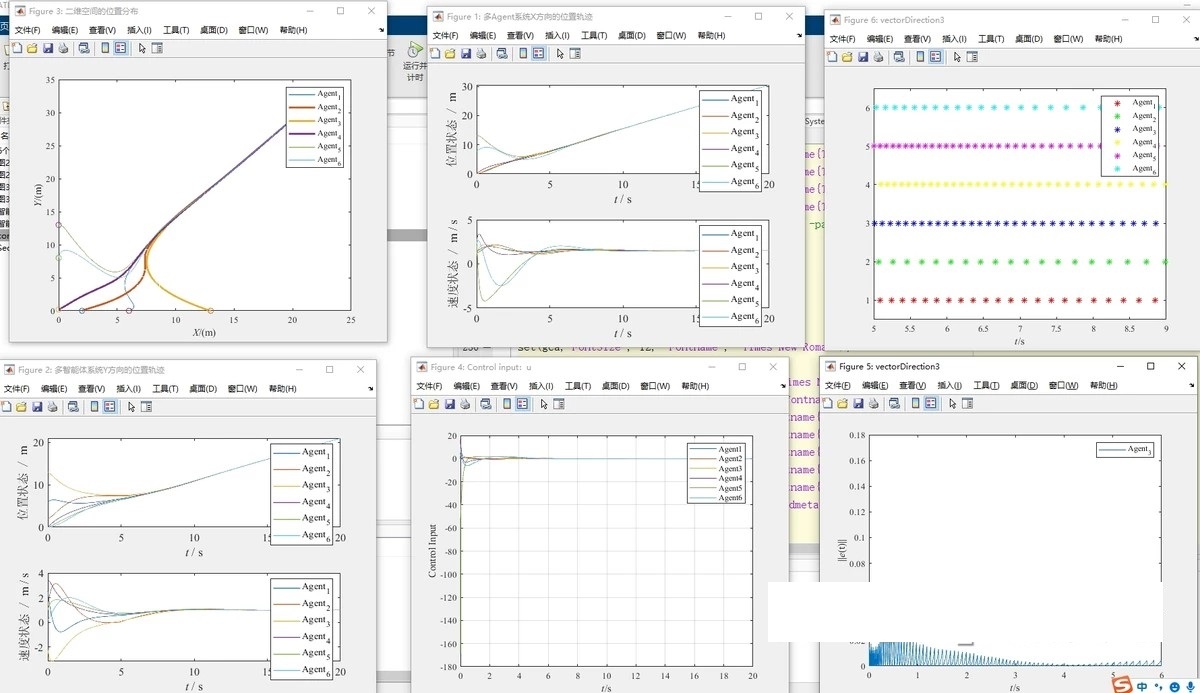
matlab仿真程序,二阶MASs,事件触发机制这段代码是一个带有领导者的二阶多智能体的领导跟随一致性仿真。以下是对代码的分析:1. 代码初始化了系统参数,包括邻接矩阵A、拉普拉斯矩阵L、系统的领导跟随矩阵H等。2. 代码定义了一个二阶系统的微分方程模型,并使用RK4方法解方程。3. 代码使用事件触发机制来控制智能体之间的通信和更新。每个智能体根据自身的位置和速度误差以及邻居智能体的误差信息来决定
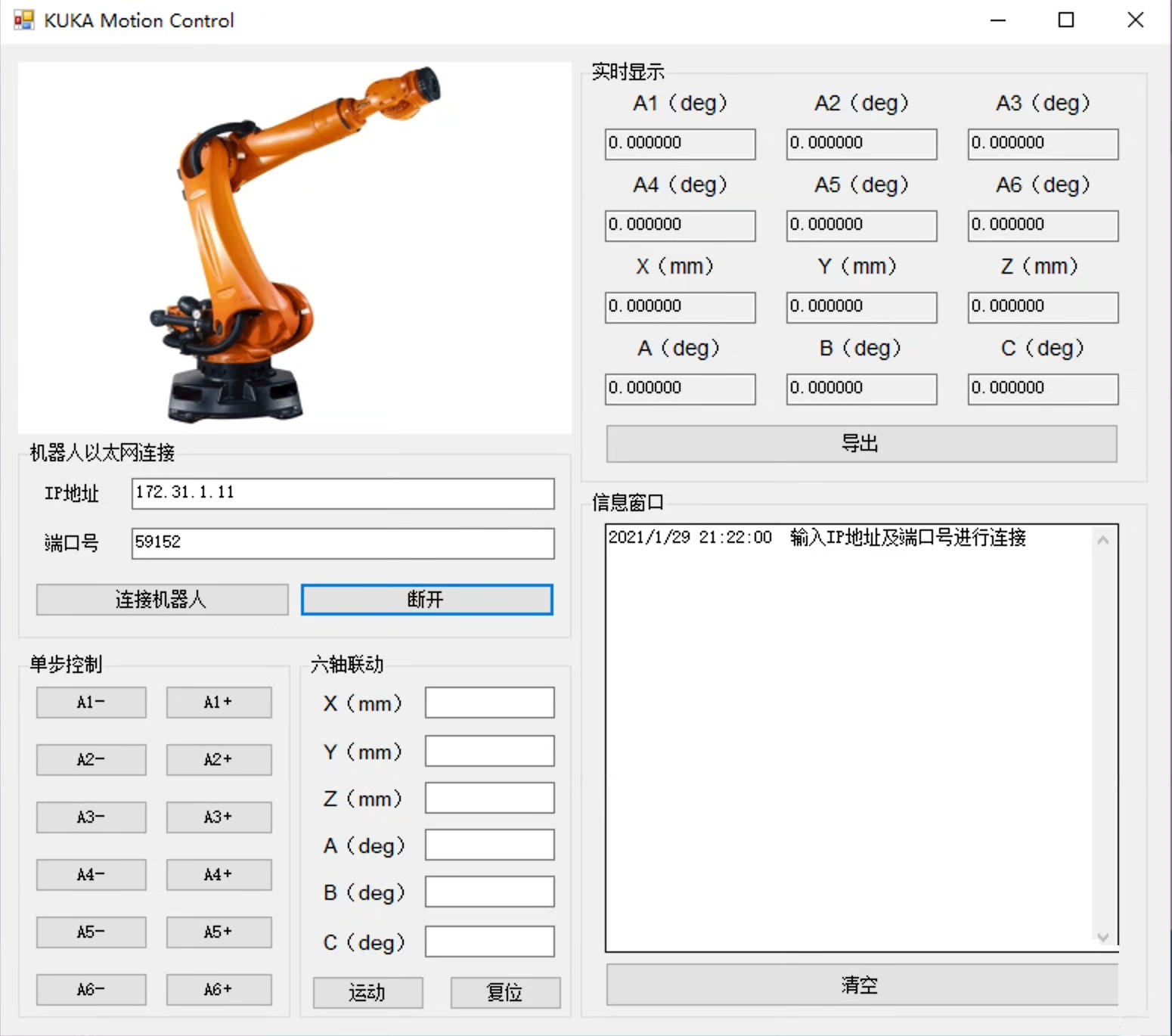
KUKA机器人TCP通讯上位机系统是一套基于C#语言和.NET Framework 4.0开发的Windows桌面应用,通过TCP/IP协议实现与KUKA机器人的实时数据交互与运动控制。系统采用客户端-服务器架构,PC端作为TCP服务端,KUKA机器人端作为客户端,支持机器人关节位置实时监控、单轴精细控制、六轴联动定位及运动数据导出等核心功能,适用于工业自动化场景中对KUKA机器人的远程操控与状态
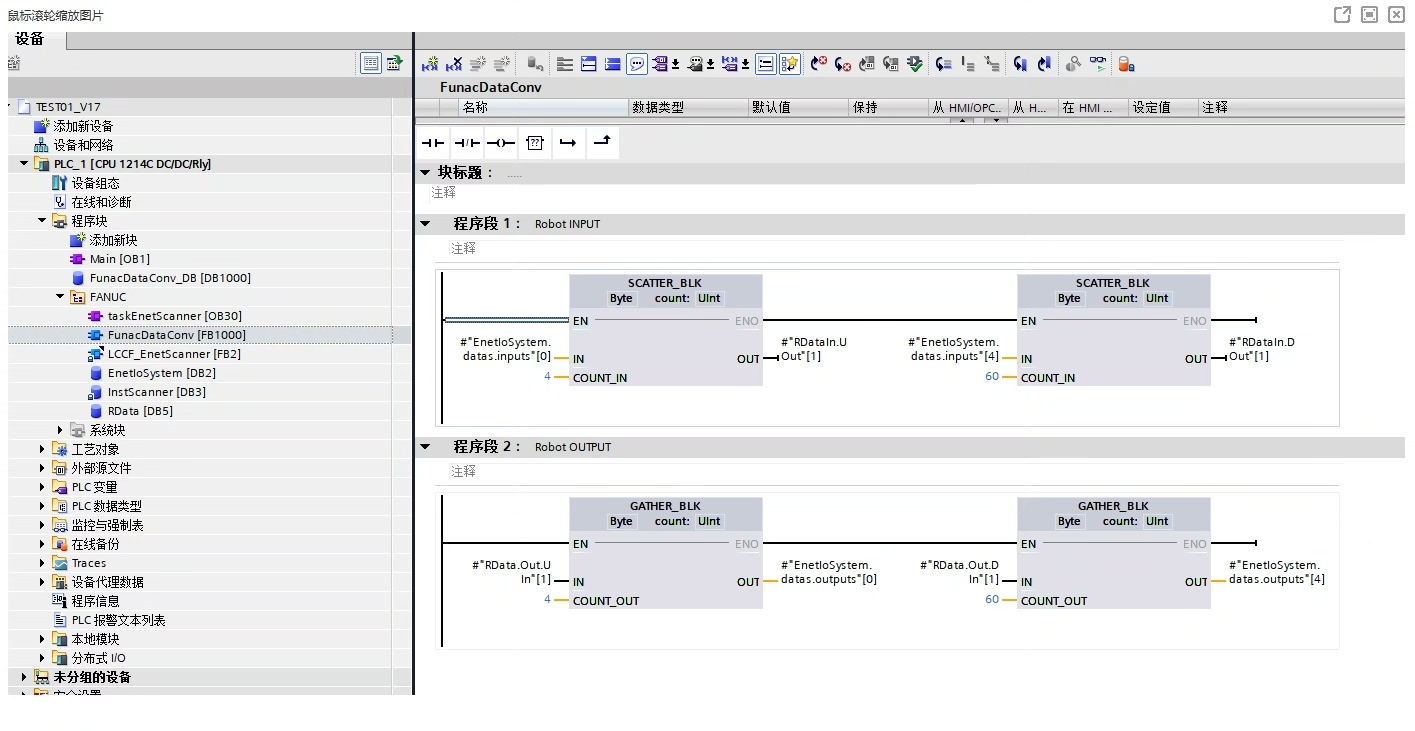
随着汇川各系列PLC广泛支持EtherNet/IP,了解和掌握EtherNet/IP协议已经成为必备技能,尤其是配合各种工业机器人进行通信,当前各大品牌的机器人均支持EtherNet/IP通信协议例如FANUC/ABB/KUKA/川崎等,相反的是,这些主流机器人品牌原生大都不支持MODBUS协议,而使用Socket通信相信用过的同行们一定记忆尤新。可以看出,Ethernet/IP 协议为工业自动化
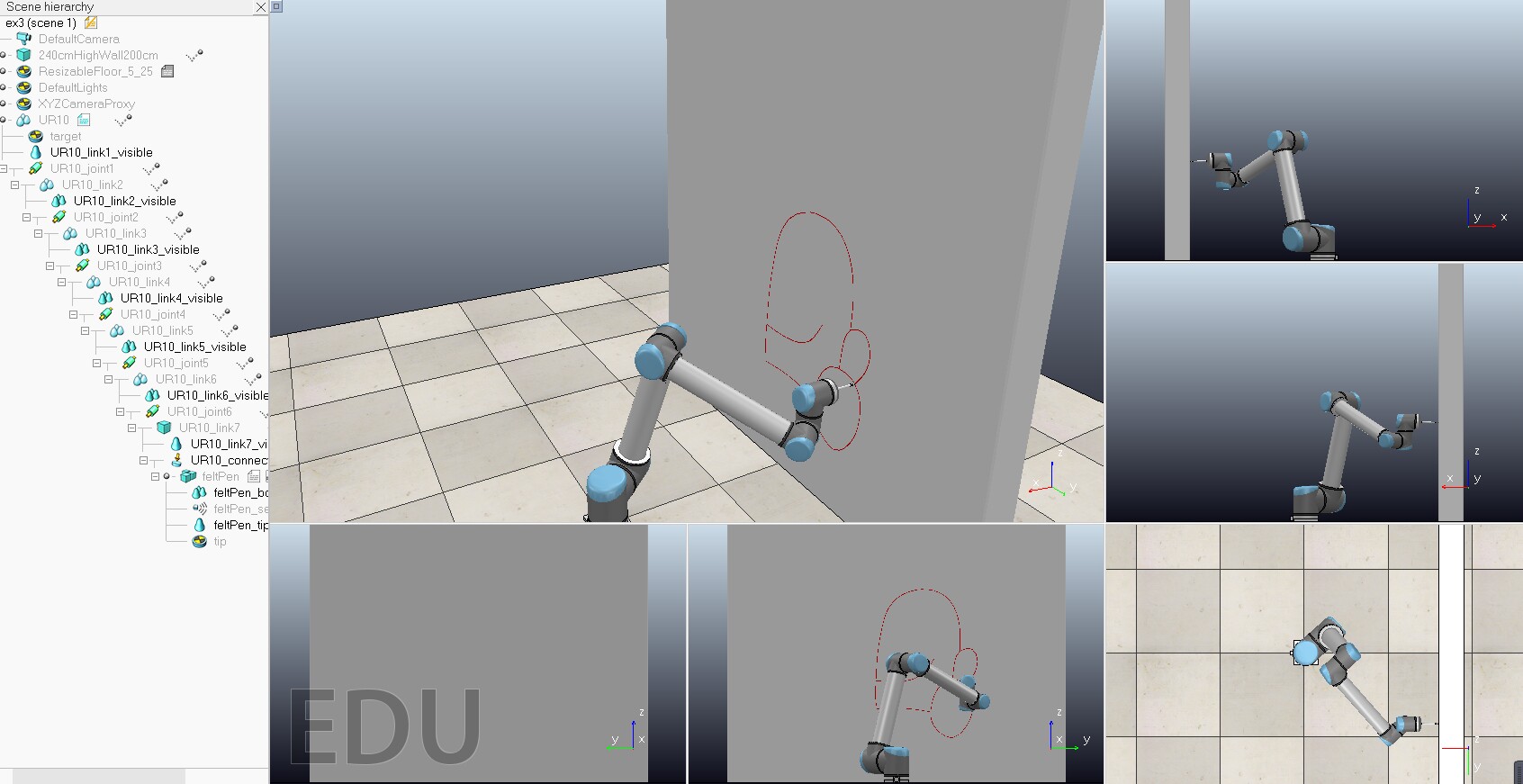
本项目基于 V-REP(现称 CoppeliaSim)机器人仿真平台,结合 MATLAB 实现机械臂的轨迹规划与控制。项目包含两个主要实验:机械臂码垛任务和墙面绘图任务,展示了机器人轨迹规划的核心算法与实际应用。该项目成功展示了基于 V-REP 和 MATLAB 的机器人轨迹控制完整解决方案,通过精心设计的轨迹规划算法和运动控制策略,实现了机械臂在三维空间中的精确、平滑运动。代码结构清晰,算法可靠
在产品经理的日常工作中,高效的工具与资源是必不可少的,在AI时代加速发展的2025年,无论是产品构思、设计还是管理,产品经理需要借助一系列智能化、协同化的工具来提升效率。本文详细盘点了20多个常用工具和网站,希望能为广大产品经理提供实用的工具参考和丰富的资源灵感,助力大家在产品创新和市场竞争中取得更大突破。
通过钉钉 AI、宜搭与 Teambition 的深度融合,制造业 LTC 流程正从 “被动响应” 转向 “主动服务”,从 “经验驱动” 升级为 “数据驱动”,为企业数字化转型提供坚实支撑。
Jira 是一种流行的项目管理工具,被团队广泛用于跟踪和管理他们的任务、问题和项目。打个不太恰当的比喻,Jira ,她就是项目管理家的单反。 如果您正在寻找 Jira 的替代方案,本文介绍了 18个最重要的 Jira 替代方案
teambition
——teambition
联系我们(工作时间:8:30-22:00)
400-660-0108 kefu@csdn.net

 DAMO开发者矩阵
DAMO开发者矩阵

 AtomGit开源社区
AtomGit开源社区

 腾讯云开发者社区
腾讯云开发者社区


 openvela
openvela

 魔乐社区
魔乐社区
 2048 AI社区
2048 AI社区

 智能体开发者社区
智能体开发者社区