- @zVGKKTvT
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
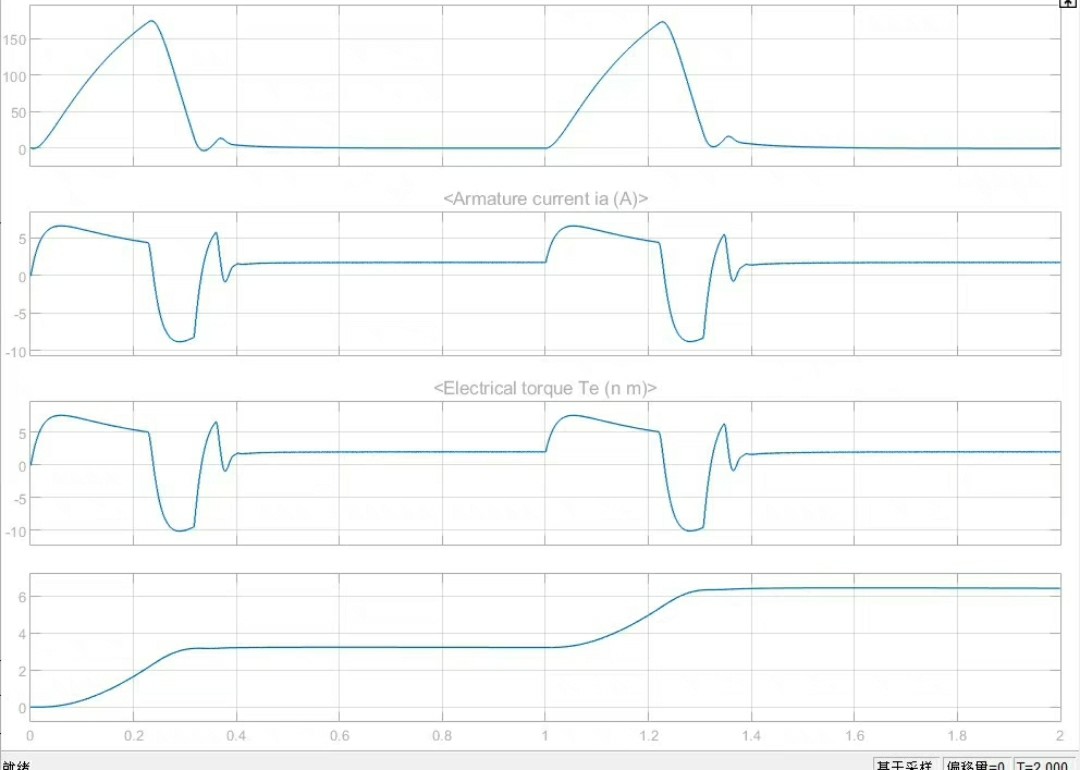
最后的最后,记得把示波器信号用To Workspace模块导出,写说明文档时直接截图波形,比用Simulink自带的显示模块清晰多了。速度环的参数整定有讲究,分享个野路子:先把电流环闭环后,给阶跃速度信号,观察实际转速的爬升斜率。先说整体架构——最内层是电流环,中间速度环,外层位置环,像俄罗斯套娃似的层层嵌套。仿真时建议分步验证:先单独调电流环,用阶跃电流给定看响应;位置环,速度环,电流环均采用P
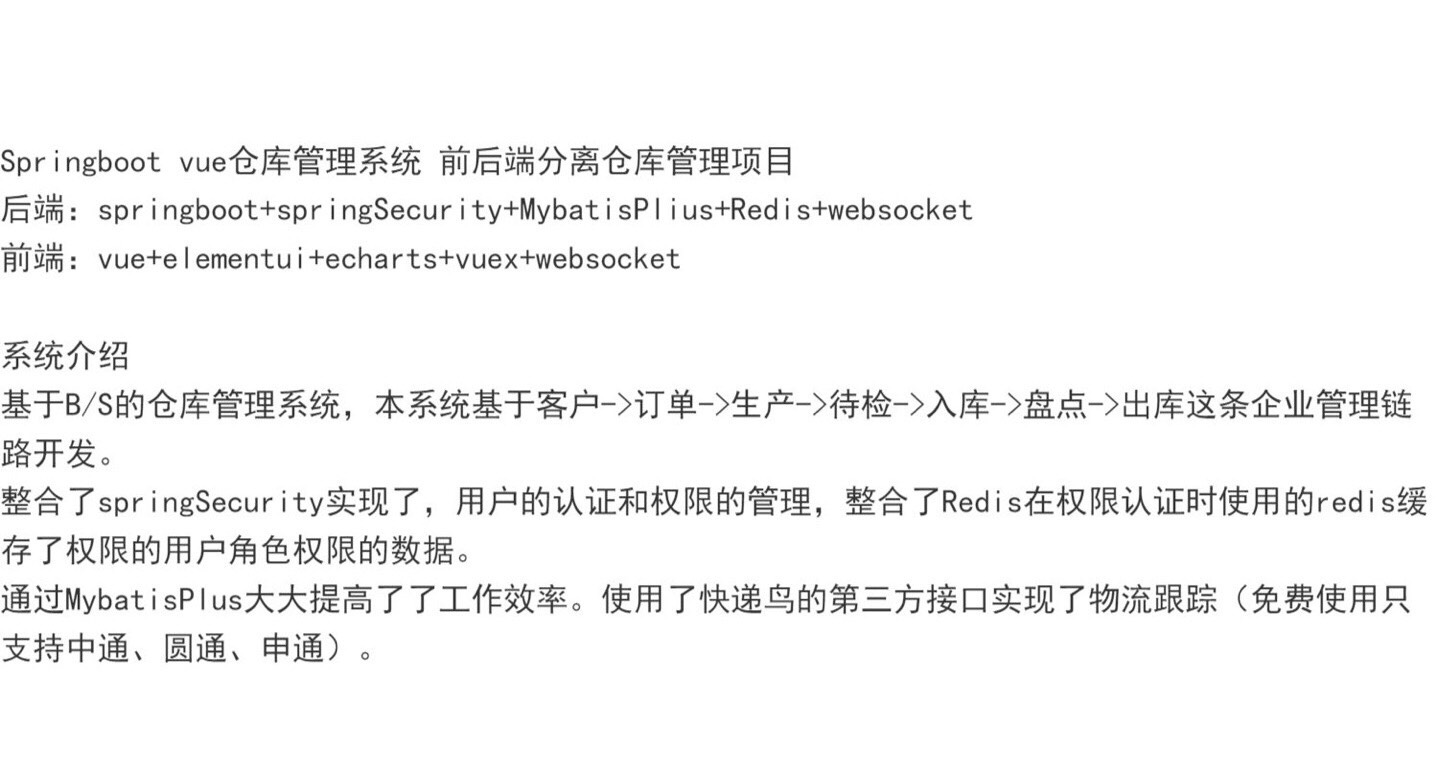
整个项目搞下来最大的体会是:仓库管理系统最核心的不是技术多牛逼,而是业务逻辑的严密性。最近在折腾一个前后端分离的仓库管理系统,用SpringBoot+Vue搞了套WMS方案。这玩意儿用起来比传统单体架构灵活不少,特别是库存实时更新这块,用WebSocket推数据比轮询舒服多了。不同型号的打印机指令集不一样,最后用了个折中方案:后端生成PDF,让浏览器调用本地打印对话框。前后端分离确实让迭代变快了,
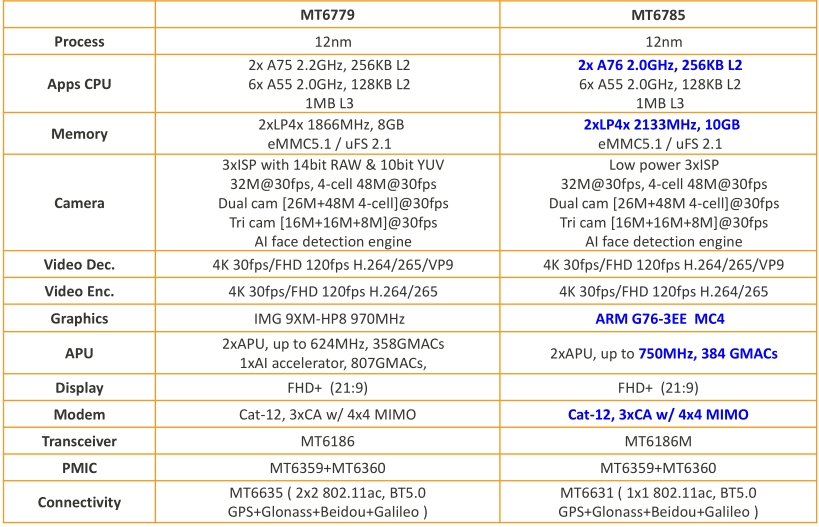
硬件设计资料里藏着彩蛋——PCB的第六层竟然藏着个温度补偿电路。原理图上标注着:"For AI burst mode only",这设计团队怕不是把实验室的咖啡机都接上了24小时连轴转吧?不过要注意内存对齐得满足64字节边界条件,否则触发硬件异常的时候日志里连个毛线提示都没有,别问我怎么知道的。用Perf工具监控发现有个坑爹的内存拷贝操作卡在流水线上,把输入图像转成YUV420格式能省掉30%的耗
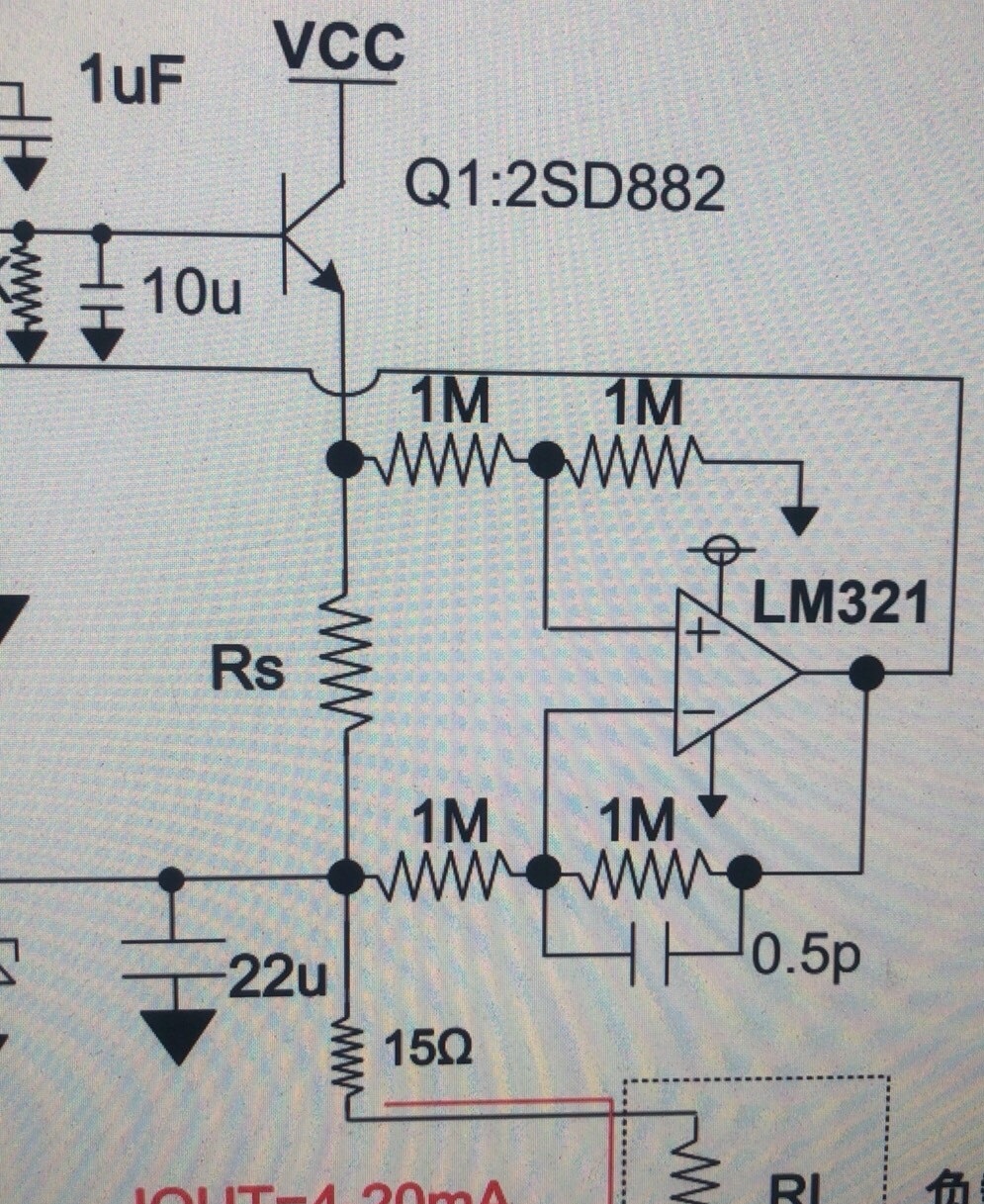
有次偷懒共用DC-DC模块,结果485通信时ADC读数乱跳,后来老老实实上了金升阳的隔离电源模块才算稳。有同好需要源码的可以私,记得备注来意。注意那个0.2的修正值,是拿万用表实测的线损电压。渐变输出这个骚操作是现场调试时学的——某次DAC突变把PLC干重启了,现在加了个软缓冲。国产24位ADC精度0.01度,国产12位DAC千分之一线性价格便宜成熟方案。国产24位ADC精度0.01度,国产12位
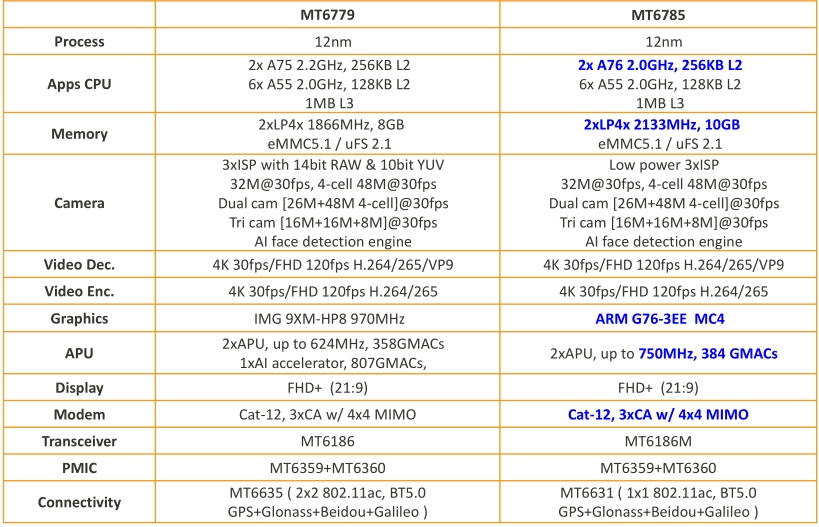
建议布局时在这块预留散热孔,我试过用0.3mm孔径+45度斜排的过孔矩阵,配合2oz铜厚,满负荷温度直降7℃。先看硬件参考设计包里的PCB布局,六层板走线明显为AI加速模块做了特殊处理。总的来说,G90这套开放方案虽然有些小坑,但对于想深度定制AI硬件的团队来说,绝对是性价比之选。最近在搞智能硬件开发的朋友应该都听过MTK G90这颗AI芯片,今天咱们就扒一扒它家开放的技术文档。建议调试时用J-L
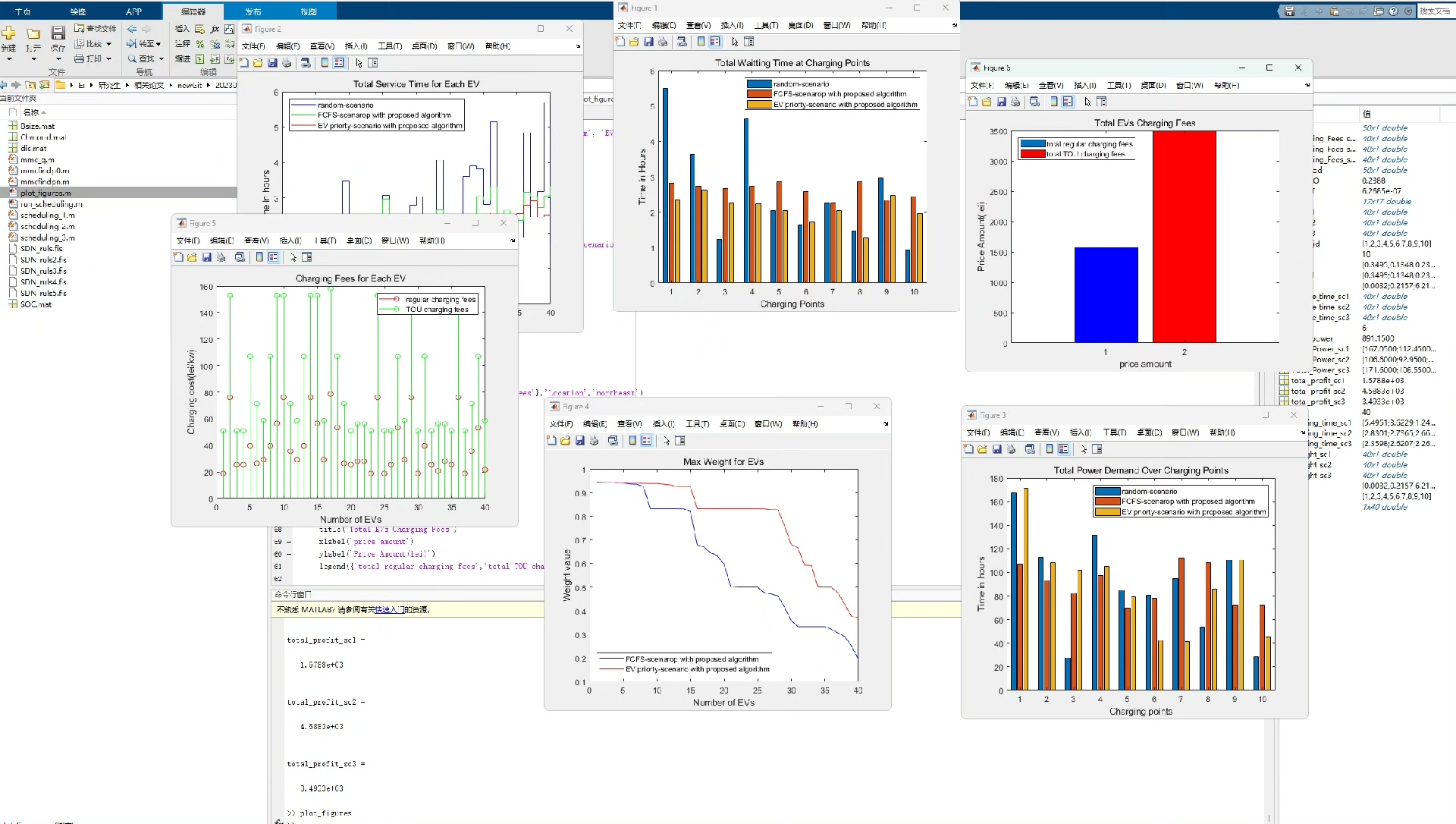
这场关于时间和电量的博弈,远比想象中更有趣。说到收益优化,充电桩运营方最怕的就是「旱的旱死,涝的涝死」。电动汽车 (EV) 的最新发展引发了充电点和停车位的电力资源有限,还必须满足用户在时间和价格方面的偏好。电动汽车 (EV) 的最新发展引发了充电点和停车位的电力资源有限,还必须满足用户在时间和价格方面的偏好。此外,还介绍了一种灵活的系统模型,允许电动汽车客户做出适当的决策来选择提出新颖充电方案的
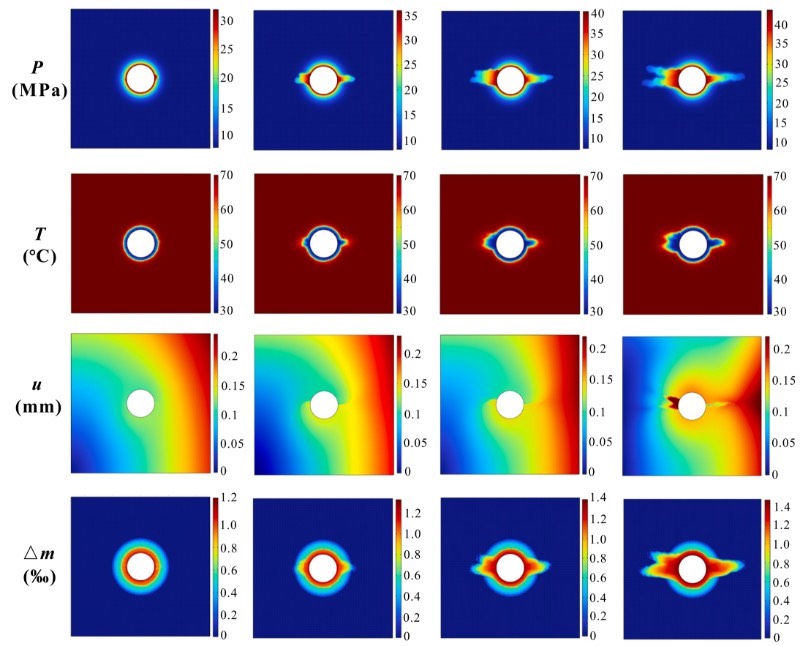
验证模型时可以用个损招——故意把热源关掉,看看变形是否归零,这招帮我抓出过三个隐藏的边界条件错误。先看典型场景:高温燃气流过涡轮叶片,热量传递导致叶片变形,而变形又反过来改变流道形状影响气流。这三个物理场的相互影响必须同时求解,就像三个醉汉互相搀扶着走路,得找对搀扶姿势才不会集体扑街。在工业仿真领域,多物理场耦合就像把火锅里的食材同时煮熟——传热、流体和结构变形搅在一起,哪个环节出问题都会翻车。最
最后说个冷知识:UG的prt文件其实是个带特征的数据库,用python的pywin32库能玩出花来。上次用pandas分析了一万个油缸模型的特征分布,发现80%的倒角根本没人改过默认值。所以啊,搞标准化模板真能省下不少头发。手里攥着上万套SolidWorks图纸的老司机都知道,最刺激的不是画图,是改图改到怀疑人生的时候发现模型树里藏着几个没约束的幽灵零件。说到模型复用,见过最骚的操作是用Excel

后来在状态估计里加了卡尔曼滤波预测,并在NMPC中引入加速度惩罚项,效果立竿见影——就像给无人机装了预判外挂,能在目标转弯前开始调整航向。(实验数据表明,在5m×5m区域内跟踪移动目标时,NMPC比传统PID的位置误差降低62%,但计算负载增加3倍。这段代码的亮点在于用符号计算自动处理旋转矩阵的非线性耦合——那个rotation_matrix(euler)会生成3x3的符号矩阵,避免了手动推导雅可
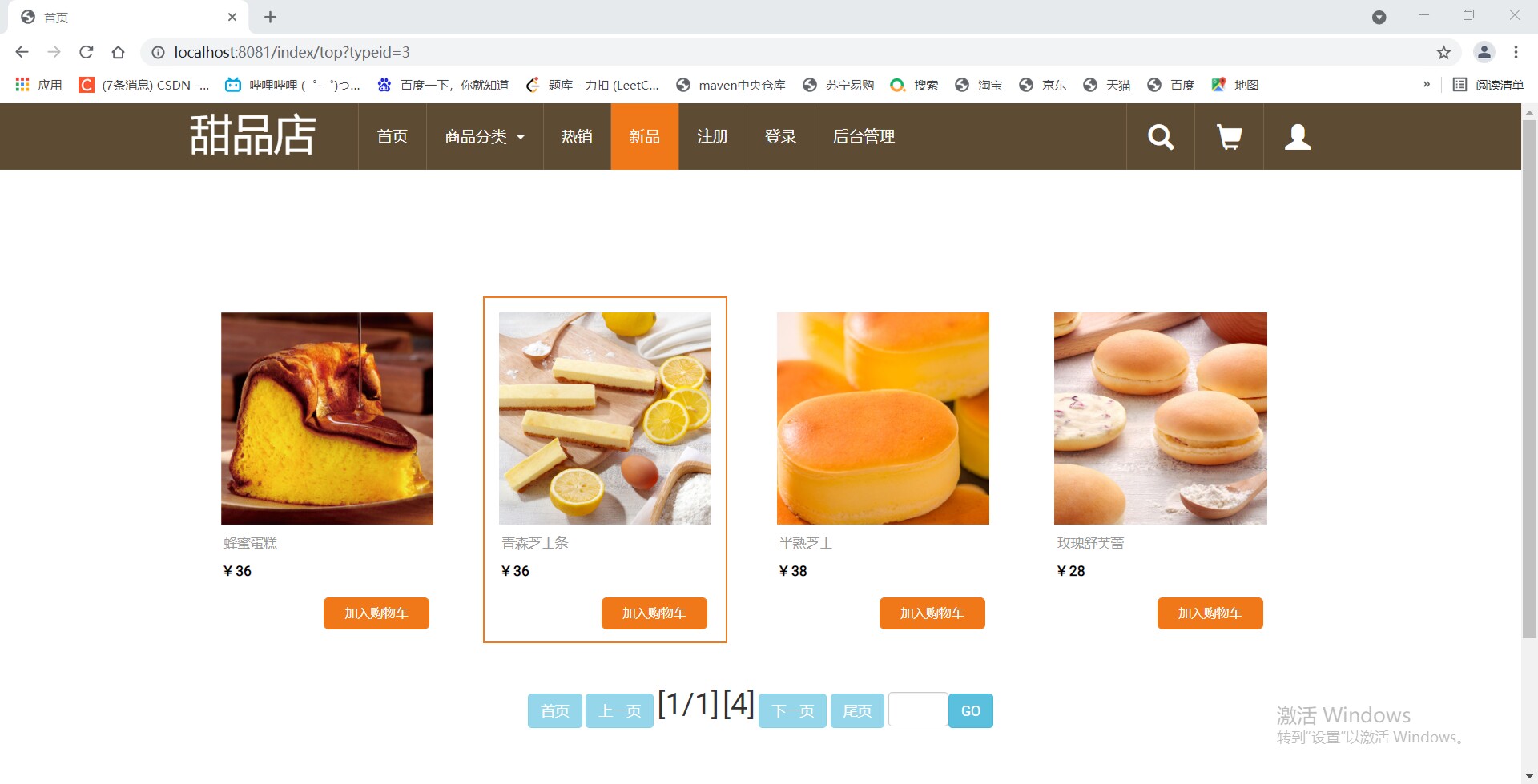
在这个甜品交易系统中,文档详细地描述了系统的架构、数据库设计、各个功能模块的实现细节等。通过仔细研读文档,我们能快速上手项目,减少很多摸索的时间。整个 SSM 甜品交易系统就是这样一个充满技术魅力的项目,通过各个部分的协同工作,实现了一个完整的甜品交易功能。这个系统主要涉及到 Java、SSM(Spring + Spring MVC + MyBatis)框架,开发工具是 Eclipse,还用到了