- @qq__68823886
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
大数据分析项目python--微博文本情感分析研究思路:基于情感词典基于机器学习LSTM算法支持向量机(SVM)包含内容:数据集文档代码在大数据时代,文本情感分析成为了挖掘海量数据背后情感倾向的重要手段。今天咱们就来聊聊用 Python 实现微博文本情感分析这个超有趣的大数据分析项目,涉及基于情感词典、机器学习中的 LSTM 算法以及支持向量机(SVM)。

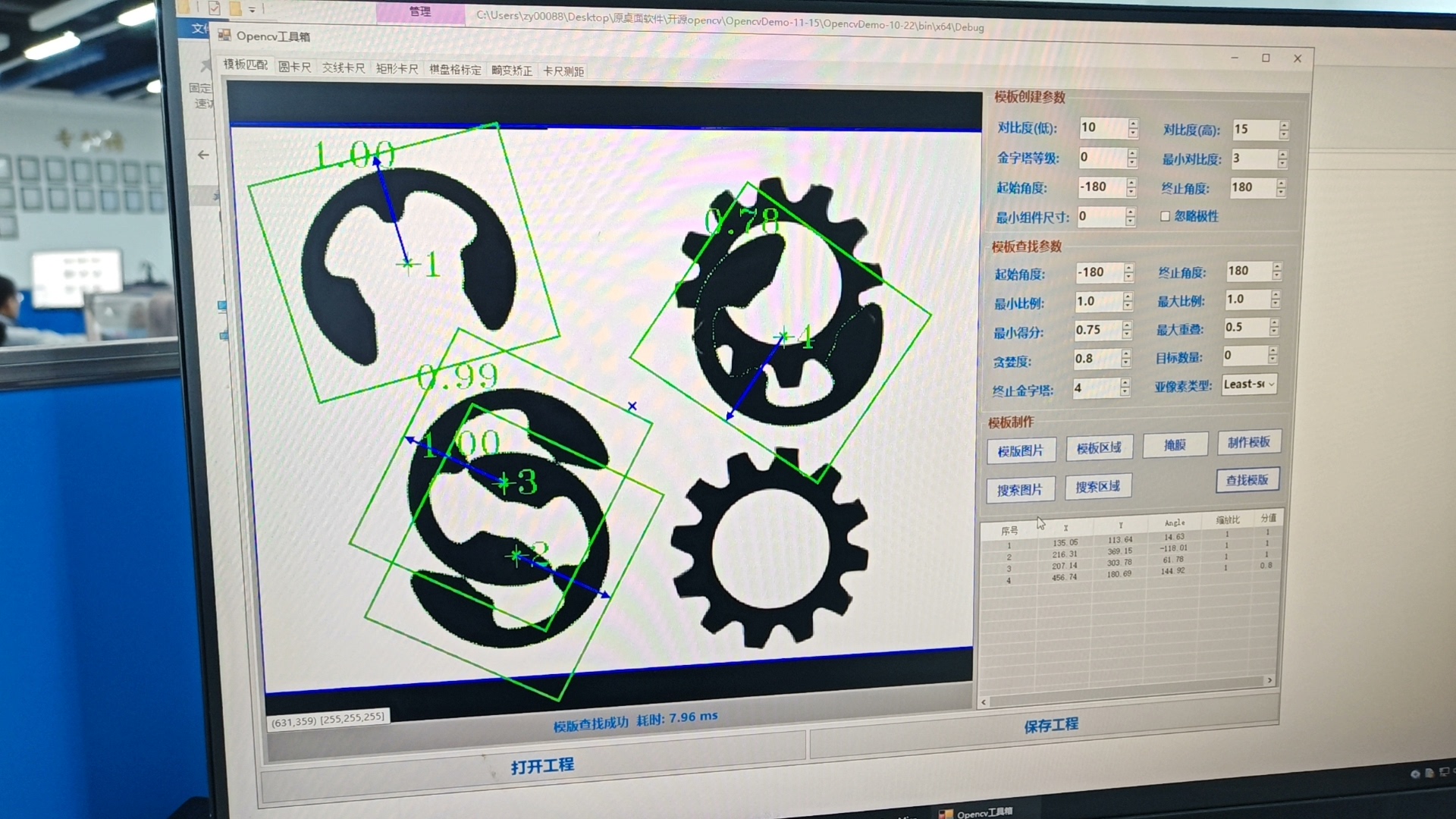
本文介绍一套基于OpenCV(通过 OpenCvSharp 封装)与构建的多功能机器视觉工具箱。该工具箱集成了模板匹配、圆/矩形/直线卡尺测量、交点检测、距离测量、相机畸变校正等核心视觉功能,适用于工业自动化、精密测量、图像分析等场景。该系统采用模块化设计,界面友好,功能完整,且具备工程保存/加载能力,便于在实际项目中部署与二次开发。该视觉工具箱是一套功能完备、结构清晰、具备工业实用价值的开源解决
c# 制作的读取串口数据显示曲线可显示多条曲线,曲线可左右拖动放大缩小。显示曲线最大最小值。保存曲线并读取。在很多工业和物联网应用场景中,我们需要通过串口获取设备数据,并以曲线的形式直观展示。今天咱们就来聊聊如何用C#实现读取串口数据并显示曲线,同时满足显示多条曲线、曲线可交互操作以及数据保存读取等进阶功能。

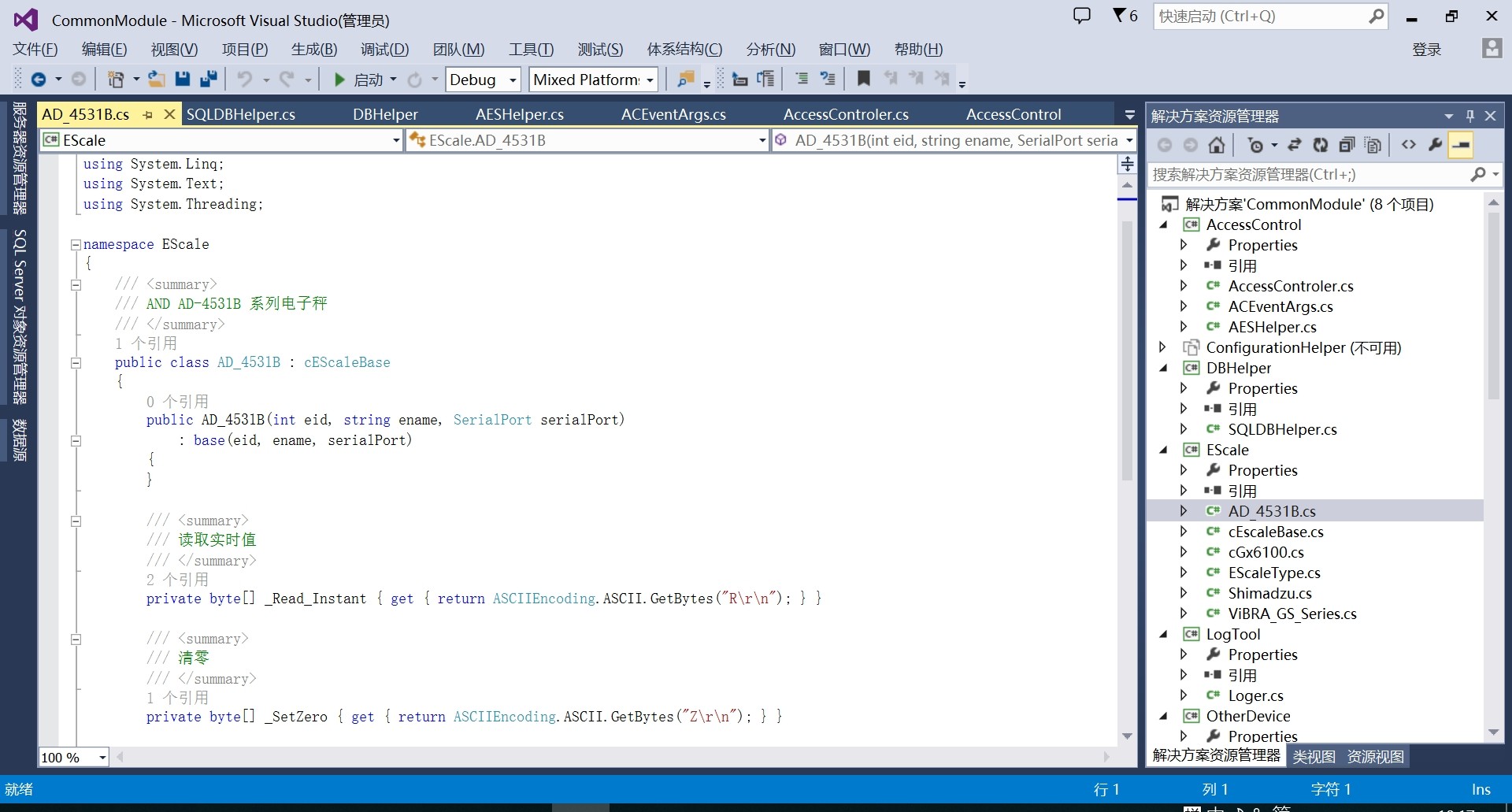
下次聊聊锂电设备常见的IO板卡通讯那些坑,保证比PLC更有意思——比如某品牌电子秤的校验算法居然用了个魔改MD5,这操作就离谱。1.C#与锂电行业主流PLC通信程序,D区M区读写控制,三菱MC协议,三菱Q系列三菱FX系列,基恩士KV8000系列,欧姆龙NJ,CJ系列以太网通讯程序。2.与电池测试仪器通讯程序,日志电阻电压测试表,AND等电子秤,康耐视扫码枪,基恩士SR-750,SR-1000系列扫
大数据分析项目python--微博文本情感分析研究思路:基于情感词典基于机器学习LSTM算法支持向量机(SVM)包含内容:数据集文档代码在大数据时代,文本情感分析成为了挖掘海量数据背后情感倾向的重要手段。今天咱们就来聊聊用 Python 实现微博文本情感分析这个超有趣的大数据分析项目,涉及基于情感词典、机器学习中的 LSTM 算法以及支持向量机(SVM)。
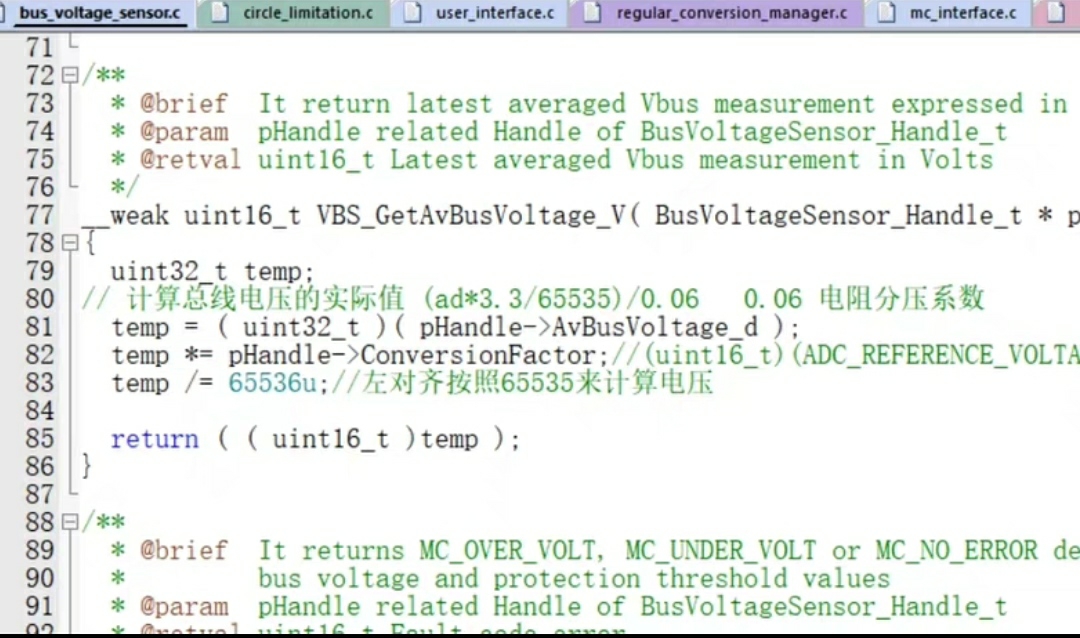
整个项目最狠的是所有算法都用浮点运算硬刚,配合STM32F4的FPU,一个控制循环5us内搞定。代码仓库里连启动时的电流波形图都贴出来了,实测从零速拉到额定转速只要200ms,稳得一批。这个开源无感FOC项目把龙伯格观测器玩出了花,三电阻采样方案配合STM32的硬件特性直接起飞。增益参数调得好,电机在零速都能稳如老狗。这里把电机方程直接写进前馈,相当于提前预判了电压需求,PI控制器只需要处理误差的
通过这种方法,我们可以灵活地分析分布式电源对配电网的影响,并为后续的优化工作打下基础。无论是调整分布式电源的接入位置,还是优化其出力,都可以通过简单的参数修改完成。如果你有具体的分布式电源接入场景,可以直接将参数调整为你的实际值,运行代码即可得到结果。欢迎留言交流你的应用场景和优化需求!
就拿相机标定来说,有次产线老师傅拿着棋盘格在镜头前晃了半小时,结果标定误差比麻花还扭曲——后来发现是棋盘格打印在A4纸上产生了热胀冷缩,换成陶瓷标定板才搞定。有次标定完误差显示0.15像素美滋滋,实际用起来定位飘得跟风筝似的——后来发现是镜头畸变模型选错了,鱼眼镜头用了普通模型,这坑踩得酸爽。OpenCV图像识别,qt界面开发,c/c++编程语言,软件程序开发,图像视觉定位抓取,相机标定,目标识别
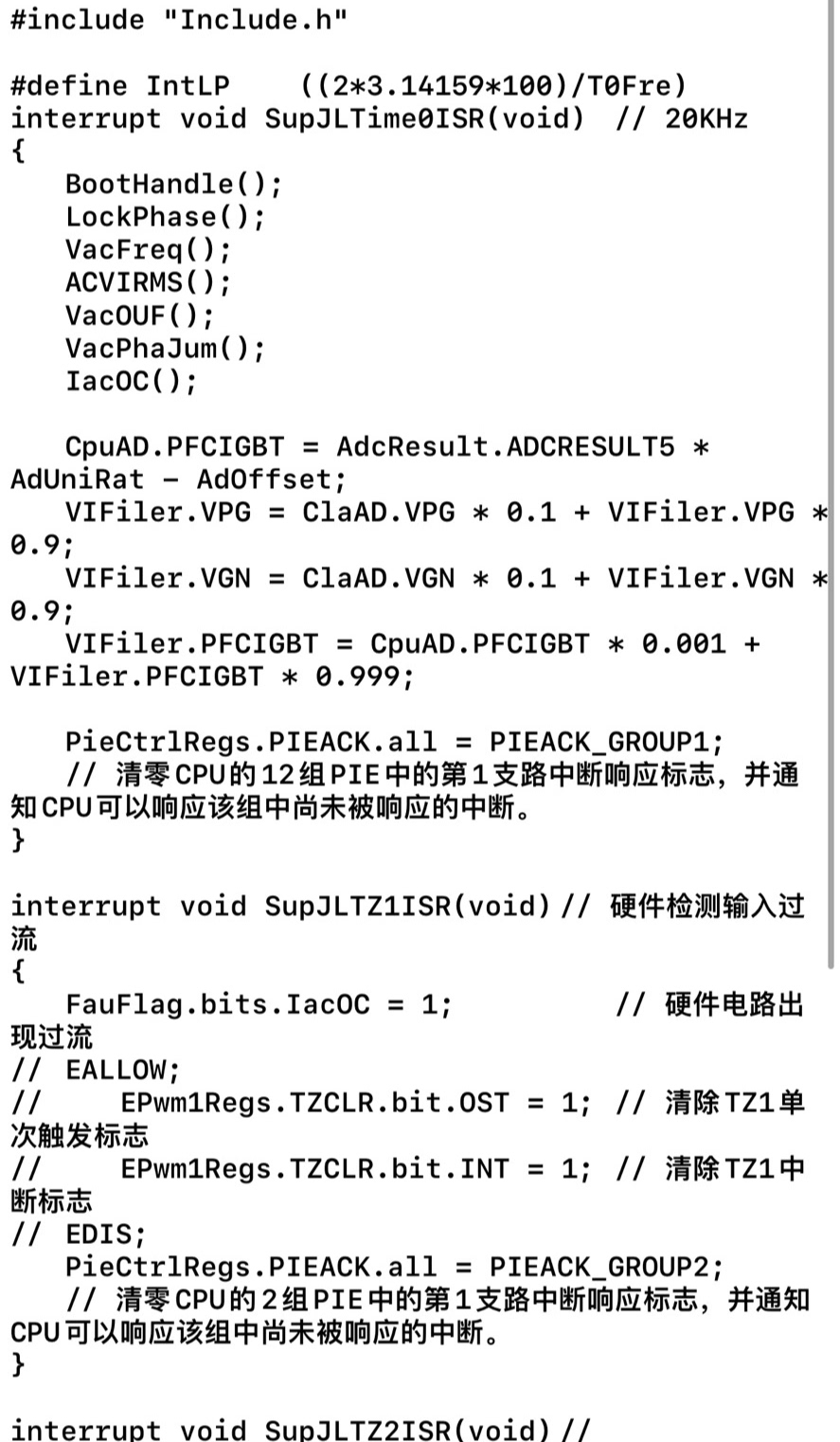
最实用的是CLAMP宏——工业现场实测比if-else判断快30%以上,毕竟PCS的控制周期经常要做到50μs级别。最精髓的是snapshot机制——瞬间锁定故障现场状态,避免处理过程中状态字变化导致的判断错乱。结构体强制单字节对齐避免内存空洞,CRC校验字段独立计算且放在最后,这都是在产线实测中踩坑踩出来的经验。最骚的是那个static变量记录故障时间戳——既避免全局变量污染,又实现了跨周期状态
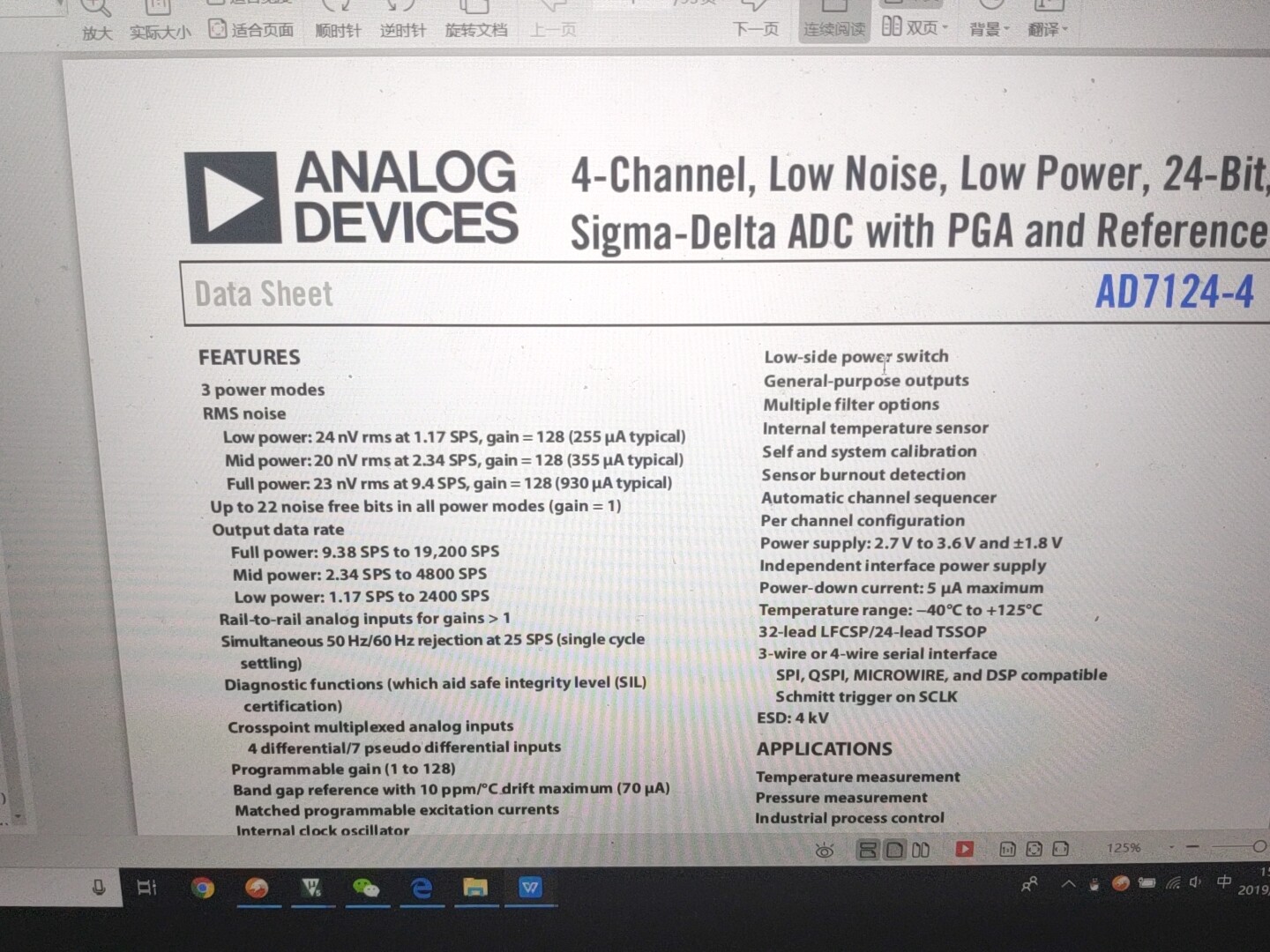
AD7124 是一款多通道、24 位分辨率的 Σ - Δ 模数转换器,适用于高精度测量应用,像称重传感器、压力传感器的数据采集就经常能看到它的身影。