- @2503_93933470
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
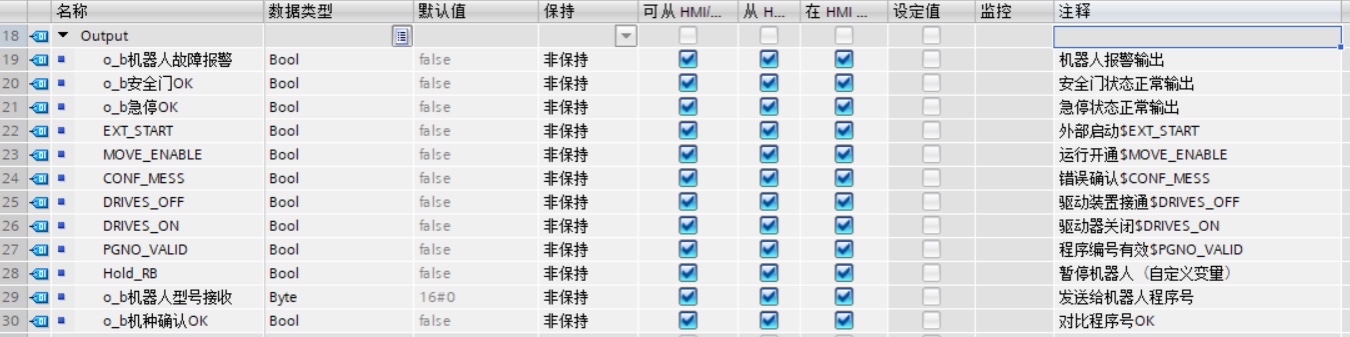
库卡外部启动原创程序西门子s7-1200/1500 KUKA机器人外部启动功能块,产线已实践使用。程序以 S7-1200 与 kuka机器人通过PN通讯为例,实现对kuka机器人外部启动调用对应子程序的功能。TIA博图V15.1SP1以上软件都可打开在自动化产线的搭建中,实现设备之间高效、稳定的通讯与协同工作是关键。今天就来聊聊西门子 S7 - 1200/1500 与库卡机器人外部启动功能块,这可
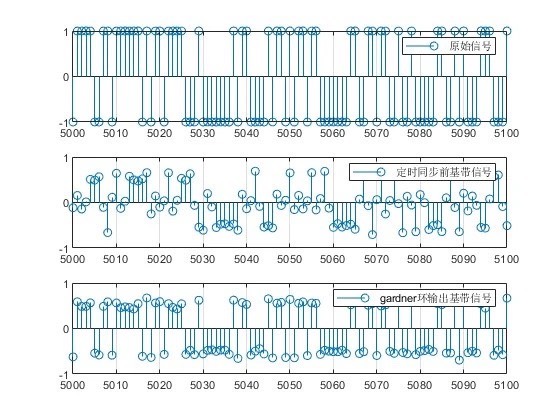
咱们直接上代码,边写边聊。总的来说,Gardner环在定时同步中表现得很不错,尤其是在QPSK调制下,通过四倍采样和误差信号的调整,能够有效地提高符号的采样精度。Gardner环的主要作用就是调整采样点,使得采样点正好落在符号的最佳位置。代码里,我们通过计算误差信号来调整采样点的相位。误差信号的计算公式是Gardner环的核心,它通过当前采样点与前一个和后一个采样点的差值来估计相位误差。运行完代码
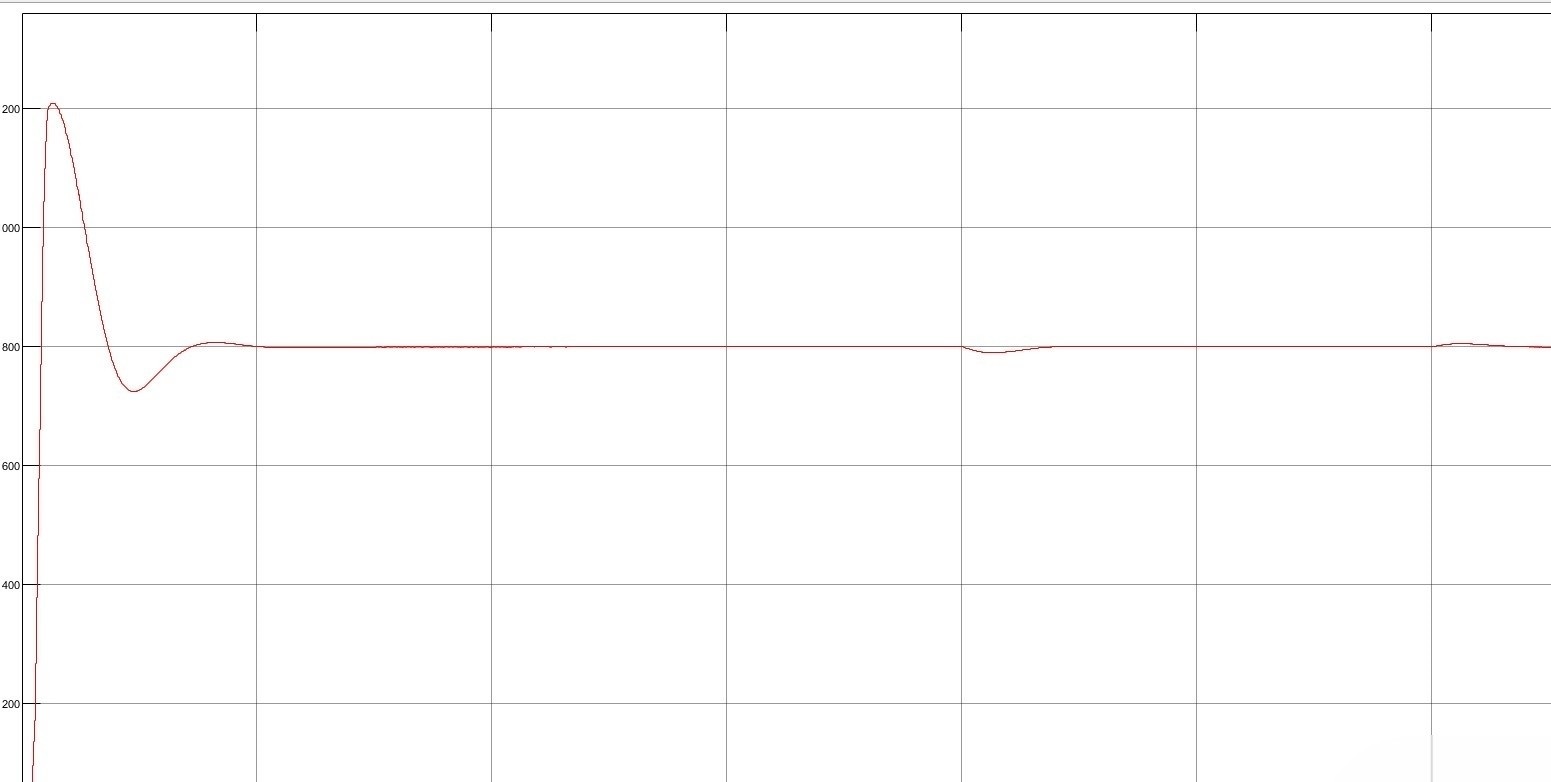
最近用MATLAB/Simulink搭了个蓄电池+超级电容的混合储能并网模型,发现有几个实操细节特别有意思,尤其是SOC管理和控制策略这块。并网逆变这块,电压外环的PI参数特别关键。(1)混合储能采用低通滤波器进行功率分配,可有效抑制功率波动,并对超级电容的soc进行能量管理,soc较高时多放电,较低时少放电,soc较低时状态与其相反。(2)蓄电池和超级电容分别采用单环恒流控制,研究了基于超级电容
通用后台权限管理系统源码前端采用?后端采用 Spring Boot、MySQL、Redis。权限认证使用 Spring Security & Token,支持多终端认证系统。支持加载动态权限菜单,多方式轻松权限控制。高效率开发,使用代码生成器可以一键生成前后端代码。内置功能分成三种内置功能:系统功能基础设施研发工具友情提示:本项目基于 RuoYi-Vue 修改,重构优化后端的代码,美化前端的界面。
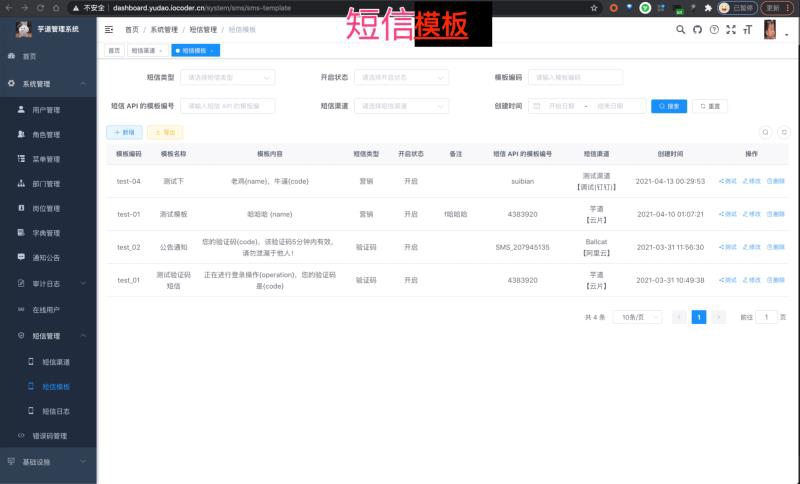
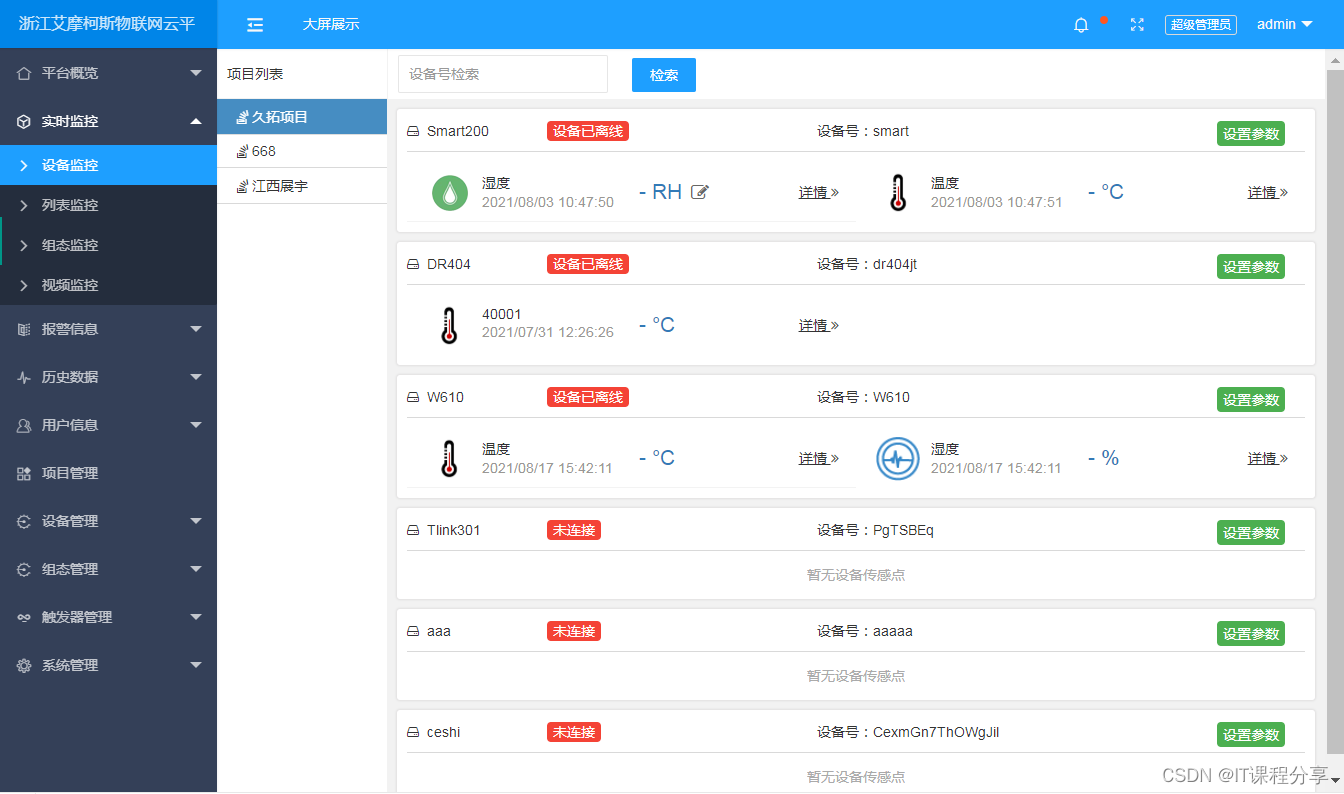
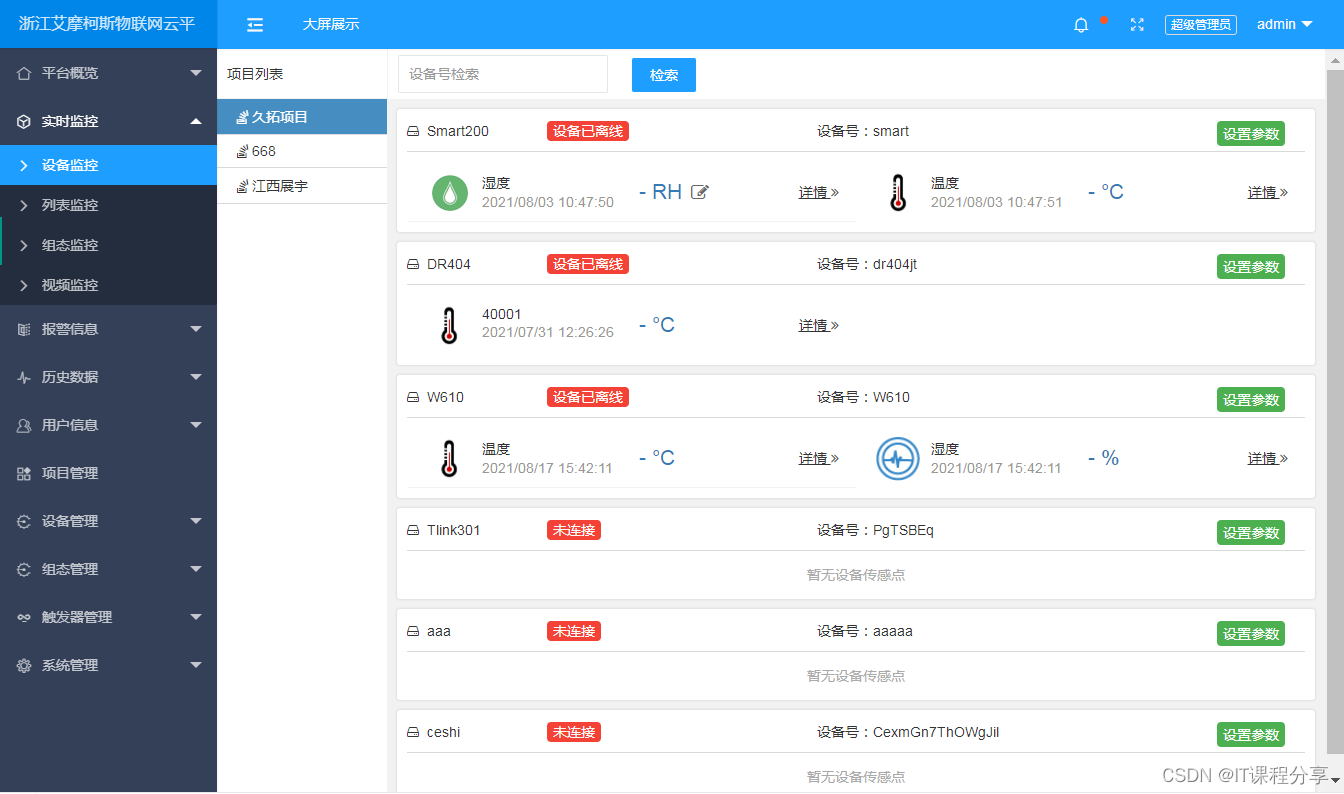
历史数据,报表导出功能;历史数据,报表导出功能;3. 系统统计:创建项目总数、接入设备数、传感数据点、触发器数、子账户用户数、设备故障率、当前设备离线数、今日报警数/已处理数。3. 系统统计:创建项目总数、接入设备数、传感数据点、触发器数、子账户用户数、设备故障率、当前设备离线数、今日报警数/已处理数。4.系统管理:用户列表、服务统计、项目列表、设备列表、设备仓库、图标管理、数据字典、系统参数。4
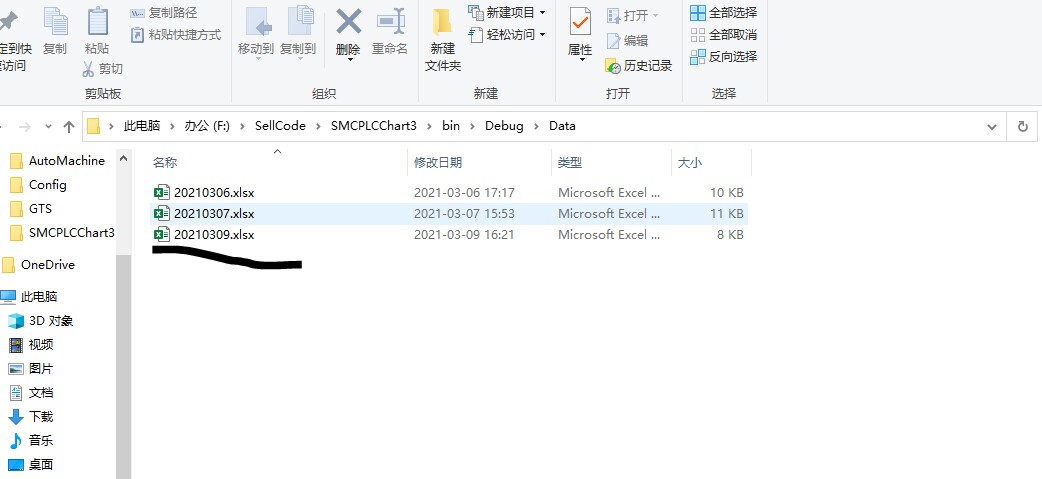
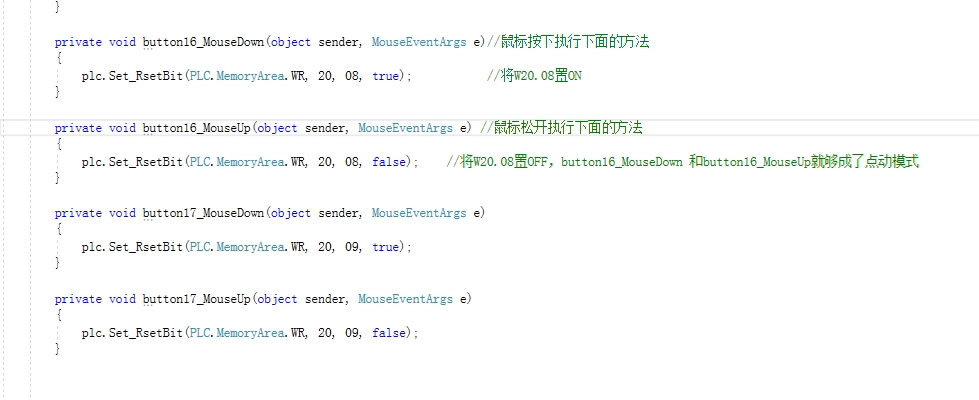
C#上位机源代码,采集西门子200smart温度数据并显示波形曲线,温度到达上限值或下限值进行报警提示。采集的数据每天生成一个excel报表,全套源代码本文旨在详细解析一套基于 C# 开发的西门子 S7-200 SMART PLC 温度数据采集与监控上位机系统的整体架构与核心功能。该系统实现了与 PLC 的稳定通信、实时数据可视化、自动化存储、历史数据查询及简单的报警逻辑,适用于工业现场对设备温度
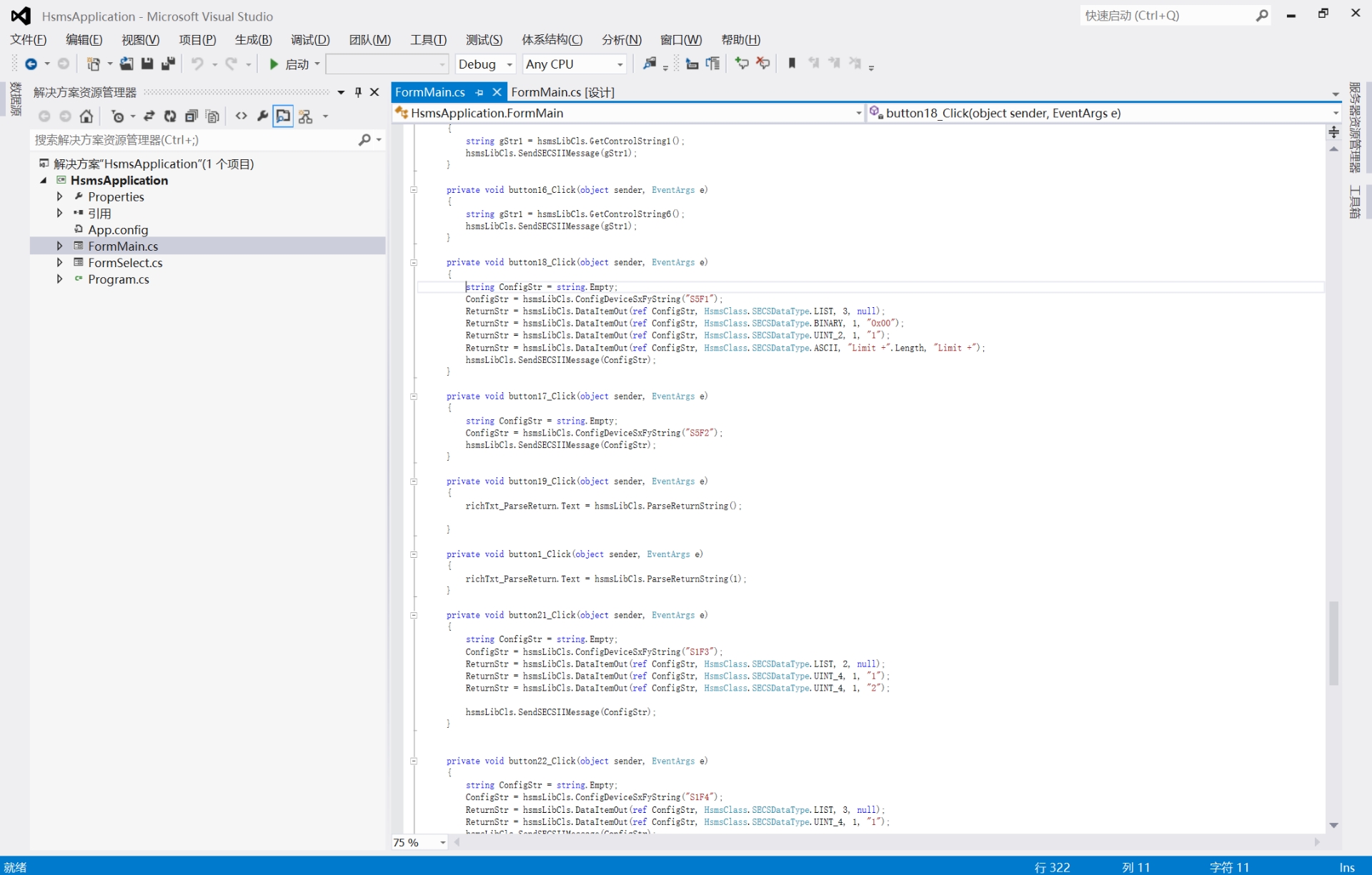
该 HSMS 上位机应用是一个功能完备、面向实战的工具。它不仅封装了底层的网络通信和协议细节,更通过直观的界面和预设的功能入口,将复杂的半导体设备通信过程简化为一键操作。无论是用于开发阶段的协议栈验证,还是生产环境中的设备联调与故障排查,它都展现出了极高的实用价值,是半导体自动化领域工程师的得力助手。
不过最让我满意的还是那个自动生成报表的模板引擎,用Freemarker+POI实现,支持导出带趋势图的Excel文件,下次有机会再细聊。3. 系统统计:创建项目总数、接入设备数、传感数据点、触发器数、子账户用户数、设备故障率、当前设备离线数、今日报警数/已处理数。4.系统管理:用户列表、服务统计、项目列表、设备列表、设备仓库、图标管理、数据字典、系统参数。1.未读报警:包括报警名称、报警详情、报警
半夜两点盯着欧姆龙PLC的绿灯狂闪,手里的串口调试助手突然蹦出一行正确的返回帧——这感觉比抢到茅台还刺激。今天就聊聊怎么用C#手搓Fins HostLink协议,这玩意儿在工控圈子里就像USB接口一样常见,但底层通讯的坑比秋名山弯道还多。C#写的欧姆龙Fins HostLink协议底层通讯代码,串口通讯源程序,自己研究通讯写的,已测试OK,共有800多行代码,可以了解欧姆龙Fins HostLin
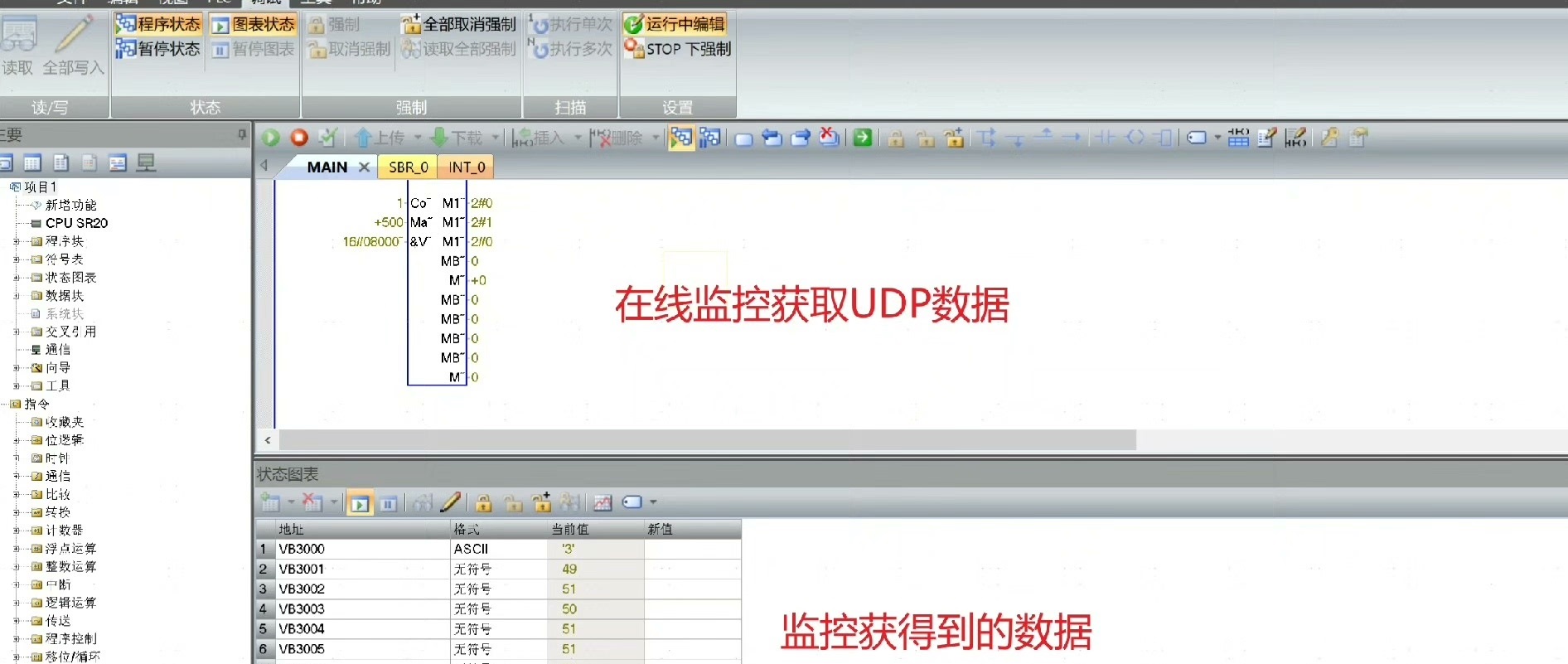
尤其是跨网络传OPC数据,防火墙、权限、安全策略折腾一圈下来,黄花菜都凉了。C#读取本地或远程OPC,DCS不用配置DCOM数据然后通过socket转发给其他电脑,或者通过MODBUS转发给PLC来读取,也可以通过UDP转发给200smart来自动获取数据(效率更高)。重点在于不用开DCOM白名单,防火墙放行502端口完事,客户端那边随便用什么语言都能接。这种玩法适合需要协议兼容的场景,但频繁写入